






永磁同步电机滑模观测器,无传感器控制算法。
ID:8435680007651968
CON_motor
永磁同步电机作为一种高效低能耗的电机类型,近年来在工业应用中得到了广泛的应用。然而,传统的永磁同步电机控制方法需要使用传感器来获取电机的转速和位置信息,增加了系统的成本和复杂性。为了解决这一问题,无传感器控制算法应运而生,其中之一就是滑模观测器。
滑模观测器是一种基于滑模变换的估计算法,通过观测电机的电流和电压信号来实时估计电机的转速和位置。相对于传统的传感器控制方法,滑模观测器具有成本低、响应快、鲁棒性强等优势。
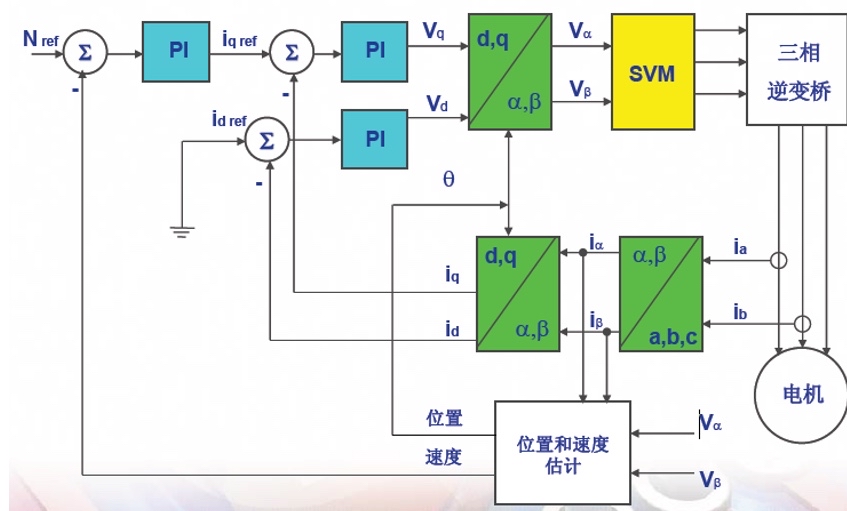
在滑模观测器算法中,首先需要建立电机的数学模型,包括电机的动态方程和输出方程。然后,通过引入滑模变换和滑模控制律,可以设计出滑模观测器的具体实现方法。滑模控制律通过引入一个滑模面,使得电机的状态变量在滑模面上运动,并保持在滑模面上。
滑模观测器的关键在于滑模面的选择和更新规则的设计。滑模面的选择需要考虑到电机的特性和控制要求,一般可以通过经验和试验来确定。而滑模面的更新规则需要根据电机的动态方程和输出方程进行推导和设计。通过更新滑模面,可以实时估计电机的转速和位置。
与传统的传感器控制方法相比,滑模观测器算法具有一些明显的优势。首先,无传感器控制可以降低系统的成本和复杂性,减少了传感器的使用和维护成本。其次,滑模观测器具有快速响应的特点,可以实时估计电机的转速和位置,实现更精确的控制。此外,滑模观测器算法还具有较强的鲁棒性,对于电机参数的变化和外部扰动具有较好的适应性。
然而,滑模观测器算法也存在一些问题和挑战。首先,滑模观测器的设计和调试需要一定的专业知识和经验,对于非专业人员来说较为困难。其次,滑模观测器在估计电机转速和位置时可能存在一定的误差,特别是在电机工作在低速和低负载情况下。因此,对于滑模观测器的优化和改进仍然是一个研究的热点和难点。
综上所述,永磁同步电机滑模观测器作为一种无传感器控制算法,具有一定的优势和应用前景。通过滑模观测器算法,可以实时估计电机的转速和位置,实现精确的控制和调节。然而,滑模观测器算法的设计和优化仍然需要进一步研究和改进,以满足不同应用场景和控制要求。
相关的代码,程序地址如下:http://matup.cn/680007651968.html
















 246
246











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









