







PointCNN: Convolution On X-Transformed Points
摘要
- 问题: CNN之所以那么成功,那是因为convolution operator能够利用网格数据中的spatially-local correlation。但是点云是无规则且无序的,因此直接使用kernel对点特征进行卷积将会导致形状信息的丢失以及点云顺序的变化
- 方法: 提出了一个简单通用的框架PointCNN,用于点云的特征学习,从输入点中学习
X
\mathcal{X}
X-transformation,在两个方面得到较好的效果:
①与这些点相关联的输入特征的权重
②将点的排序映射到一个潜在且canonical的顺序
在 X \mathcal{X} X-transformation特征空间上还会使用convolution operator的元素间乘法和加法操作 - 代码:
①https://github.com/yangyanli/PointCNN TensorFlow版本
②https://github.com/pyg-team/pytorch_geometric PyTorch版本,这是一个库,将PointCNN封装成了一个函数
③https://github.com/nicolas-chaulet/torch-points3d 集中复现了很多篇经典的文章

引言
假设 C C C维输入特征的无序集合 F = { f a , f b , f c , f d } \mathbb{F}=\left\{ {{f_a},{f_b},{f_c},{f_d}} \right\} F={fa,fb,fc,fd}在图1(( i i i)-( i v iv iv))中所有的情况下都是相同的,并且有大小为 4 × C 4 \times C 4×C的kernel K = [ k α , k β , k γ , k δ ] T \mathbf{K}=\left[k_{\alpha}, k_{\beta}, k_{\gamma}, k_{\delta}\right]^{T} K=[kα,kβ,kγ,kδ]T。
在图1( i i i)中,遵循着给定规律网格的结构,局部 2 × 2 2 \times 2 2×2patch中的特征可以写成大小为 4 × C 4 \times C 4×C的 [ f a , f b , f c , f d ] T \left[f_{a}, f_{b}, f_{c}, f_{d}\right]^{T} [fa,fb,fc,fd]T,通过与 K \mathbf{K} K进行卷积,得到 f i = Conv ( K , [ f a , f b , f c , f d ] T ) f_{i}=\operatorname{Conv}\left(\mathbf{K},\left[f_{a}, f_{b}, f_{c}, f_{d}\right]^{T}\right) fi=Conv(K,[fa,fb,fc,fd]T),其中 Conv ( ⋅ , ⋅ ) \operatorname{Conv}(\cdot, \cdot) Conv(⋅,⋅)是一个简单的元素间相乘并且进行sum 2 ^2 2的操作。
在图1 ( i i ) , ( i i i ) (i i),(i i i) (ii),(iii) 和 ( i v ) (i v) (iv)中,这些点的顺序是任意的。根据图中的顺序,输入特征集合 F \mathbb{F} F在 ( i i ) (i i) (ii) 和 ( i i i ) (i i i) (iii)中可以写成 [ f a , f b , f c , f d ] T \left[f_{a}, f_{b}, f_{c}, f_{d}\right]^{T} [fa,fb,fc,fd]T,在 ( i v ) (iv) (iv)中可以写成 [ f c , f a , f b , f d ] T \left[f_{c}, f_{a}, f_{b}, f_{d}\right]^{T} [fc,fa,fb,fd]T。基于此,如果直接使用convolution operator,三种情况的输出特征参见图1中的公式(1a)。我们可以注意到,在任何情况下 f i i ≡ f i i i f_{i i} \equiv f_{i i i} fii≡fiii都成立,而且在大多数情况下 f i i i ≠ f i v f_{i i i} \neq f_{i v} fiii=fiv成立。这个例子表明直接使用卷积会导致形状信息的缺失( f i i ≡ f i i i f_{i i} \equiv f_{i i i} fii≡fiii)和顺序的变化( f i i i ≠ f i v f_{i i i} \neq f_{i v} fiii=fiv)。
本文提出使用多层感知机学习 K × K X K \times K \mathcal{X} K×KX-transformation,对 K K K个输入点云 ( p 1 , p 2 , … , p K ) \left(p_{1}, p_{2}, \ldots, p_{K}\right) (p1,p2,…,pK)的坐标进行变换,即 X = M L P ( p 1 , p 2 , … , p K ) \mathcal{X}=M L P\left(p_{1}, p_{2}, \ldots, p_{K}\right) X=MLP(p1,p2,…,pK)。我们的目标是使用这个变换同时对输入的特征进行赋权和排序,随后对变换后的特征进行卷积。上述的步骤可以称为 X \mathcal{X} X-Conv,是PointCNN中的一个基础block。 X \mathcal{X} X-Conv在 ( i i ) , ( i i i ) (i i),(i i i) (ii),(iii)和 ( i v ) (i v) (iv)中可以表示成图1中公式(1b),其中 X \mathcal{X} Xs是一个 4 × 4 4 \times 4 4×4的矩阵,因为图中 K = 4 K=4 K=4。我们可以注意到,因为 X i i \mathcal{X}_{i i} Xii和 X i i i \mathcal{X}_{i i i} Xiii是从不同形状中学习得到的,所以它们可以有所不同,从而对输入特性施加相应的权重,并且达到 f i i ≠ f i i i f_{i i} \neq f_{i i i} fii=fiii的效果。对于 X i i i \mathcal{X}_{i i i} Xiii 和 X i v \mathcal{X}_{i v} Xiv,如果它们通过学习后能够满足 X i i i = X i v × Π \mathcal{X}_{i i i}=\mathcal{X}_{i v} \times \Pi Xiii=Xiv×Π,其中 Π \Pi Π是将 ( c , a , b , d ) (c, a, b, d) (c,a,b,d)排序为 ( a , b , c , d ) (a, b, c, d) (a,b,c,d)的排序矩阵的话,那么也可以达到 f i i i ≡ f i v f_{i i i} \equiv f_{i v} fiii≡fiv的效果。
通过图1中的例子分析可以看出,在理想 X \mathcal{X} X-transformation下, X \mathcal{X} X-Conv能够考虑到点的形状,同时具有排序不变性。事实上,我们发现学习到的 X \mathcal{X} X-transformation与我们想的差远了,尤其是在排序不变性的方面。但是,基于 X \mathcal{X} X-Conv的PointCNN的性能要比现有方法的性能都要好。
PointCNN

Hierarchical Convolution
在介绍PointCNN中的hierarchical convolution之前,先简要地介绍其在规则网格上的应用,如图2上所示。对于基于CNN的网格而言,输入是大小为 R 1 × R 1 × C 1 R_{1} \times R_{1} \times C_{1} R1×R1×C1的特征图 F 1 \mathbf{F}_{1} F1,其中 R 1 R_{1} R1是空间分辨率, C 1 C_{1} C1是特征通道数。大小为 K × K × C 1 × C 2 K \times K \times C_{1} \times C_{2} K×K×C1×C2的kernel和 F 1 \mathbf{F}_{1} F1中大小为 K × K × C 1 K \times K \times C_{1} K×K×C1的patches进行卷积,得到另外一个大小为 R 2 × R 2 × C 2 R_{2} \times R_{2} \times C_{2} R2×R2×C2的特征图 F 2 \mathbf{F}_{2} F2。在图2上中, R 1 = 4 , K = 2 R_{1}=4, K=2 R1=4,K=2, R 2 = 3 R_{2}=3 R2=3。与特征 F 1 \mathbf{F}_{1} F1x相比, F 2 \mathbf{F}_{2} F2的空间分辨率很低( ( R 2 < R 1 ) \left(R_{2}<R_{1}\right) (R2<R1)),但是具有更深的通道数( ( C 2 > C 1 ) \left(C_{2}>C_{1}\right) (C2>C1)),并且具有更高层的信息。
PointCNN的输入为 F 1 = { ( p 1 , i , f 1 , i ) : i = 1 , 2 , … , N 1 } \mathbb{F}_{1}=\left\{\left(p_{1, i}, f_{1, i}\right): i=1,2, \ldots, N_{1}\right\} F1={(p1,i,f1,i):i=1,2,…,N1},其中 { p 1 , i : p 1 , i ∈ \left\{p_{1, i}: p_{1, i} \in\right. {p1,i:p1,i∈ R Dim } \left.\mathbb{R}^{\text {Dim }}\right\} RDim }是一组点,还有每个点对应的特征 { f 1 , i : f 1 , i ∈ R C 1 } \left\{f_{1, i}: f_{1, i} \in \mathbb{R}^{C_{1}}\right\} {f1,i:f1,i∈RC1}。根据基于网格CNN的分层构造,在 F 1 \mathbb{F}_{1} F1上应用 X \mathcal{X} X-Conv 便可得到更高层的表示 F 2 = { ( p 2 , i , f 2 , i ) : f 2 , i ∈ R C 2 , i = 1 , 2 , … , N 2 } \mathbb{F}_{2}=\left\{\left(p_{2, i}, f_{2, i}\right): f_{2, i} \in \mathbb{R}^{C_{2}}, i=1,2, \ldots, N_{2}\right\} F2={(p2,i,f2,i):f2,i∈RC2,i=1,2,…,N2},其中 { p 2 , i } \left\{p_{2, i}\right\} {p2,i}是 { p 1 , i } \left\{p_{1, i}\right\} {p1,i}的一组表示点, F 2 \mathbb{F}_{2} F2 的的空间分辨率比 F 1 \mathbb{F}_{1} F1小, F 2 \mathbb{F}_{2} F2的通道数比 F 1 \mathbb{F}_{1} F1多,即 N 2 < N 1 N_{2}<N_{1} N2<N1, C 2 > C 1 C_{2}>C_{1} C2>C1。当上述操作循环进行后,带有输入点的特征会被“投影”或是“聚合”到更少的点,但是每个点的特征信息却是更加丰富。
{ p 2 , i } \left\{p_{2, i}\right\} {p2,i}中的点在分类任务中是通过 { p 1 , i } \left\{p_{1, i}\right\} {p1,i}随机下采样得到的,在分割任务中是通过Farthest Point Sampling(FPS)算法得到的,因为分割任务更需要均匀的点分布。如果有更好的方法选择点,那么最终的结果肯定会更好,在以后的工作中会进行深入的研究。
X \mathcal{X} X-Conv Operator
X
\mathcal{X}
X-Conv 在点云的局部区域中进行操作,由于输出特性应该与表示点
{
p
2
,
i
}
\left\{p_{2, i}\right\}
{p2,i}相关联,因此
X
\mathcal{X}
X-Conv将它们在
{
p
1
,
i
}
\left\{p_{1, i}\right\}
{p1,i}中的邻域点、相关的特性作为输入,以进行卷积。为了更简单地描述,记
p
p
p为
{
p
2
,
i
}
\left\{p_{2, i}\right\}
{p2,i}中的表示点,
p
p
p的特征为
f
f
f,
p
p
p在
{
p
1
,
i
}
\left\{p_{1, i}\right\}
{p1,i}的相邻点为
N
\mathbb{N}
N。因此,对于特定点
p
p
p而言,
X
\mathcal{X}
X-Conv的输入为
S
=
{
(
p
i
,
f
i
)
:
p
i
∈
N
}
\mathbb{S}=\left\{\left(p_{i}, f_{i}\right): p_{i} \in \mathbb{N}\right\}
S={(pi,fi):pi∈N}。
S
\mathbb{S}
S是一组无序的集合。在不失一般性的情况下,
S
\mathbb{S}
S可以写成
K
×
D
i
m
K \times Dim
K×Dim的矩阵
P
=
(
p
1
,
p
2
,
…
,
p
K
)
T
\mathbf{P}=\left(p_{1}, p_{2}, \ldots, p_{K}\right)^{T}
P=(p1,p2,…,pK)T和
K
×
C
1
K \times C_{1}
K×C1的矩阵
F
=
(
f
1
,
f
2
,
…
,
f
K
)
T
\mathbf{F}=\left(f_{1}, f_{2}, \ldots, f_{K}\right)^{T}
F=(f1,f2,…,fK)T,
K
\mathbf{K}
K 表示要训练的kernel。有了这些输入,就能计算
p
p
p的输出特征:
F
p
=
X
−
Conv
(
K
,
p
,
P
,
F
)
=
Conv
(
K
,
MLP
(
P
−
p
)
×
[
M
L
P
δ
(
P
−
p
)
,
F
]
)
,
\mathbf{F}_{p}=\mathcal{X}-\operatorname{Conv}(\mathbf{K}, p, \mathbf{P}, \mathbf{F})=\operatorname{Conv}\left(\mathbf{K}, \operatorname{MLP}(\mathbf{P}-p) \times\left[M L P_{\delta}(\mathbf{P}-p), \mathbf{F}\right]\right),
Fp=X−Conv(K,p,P,F)=Conv(K,MLP(P−p)×[MLPδ(P−p),F]),
其中
M
L
P
δ
(
⋅
)
M L P_{\delta}(\cdot)
MLPδ(⋅)是单独作用在一个点上的多层感知机,在
X
\mathcal{X}
X-Conv 的所有操作,
Conv
(
⋅
,
⋅
)
,
MLP
(
⋅
)
\operatorname{Conv}(\cdot, \cdot), \operatorname{MLP}(\cdot)
Conv(⋅,⋅),MLP(⋅), 矩阵乘法
(
⋅
)
×
(
⋅
)
(\cdot) \times(\cdot)
(⋅)×(⋅)和
M
L
P
δ
(
⋅
)
M L P_{\delta}(\cdot)
MLPδ(⋅)都是可导的,那么
X
\mathcal{X}
X-Conv 也是可导的,因此可以被用到其他的反向传播神经网络中。
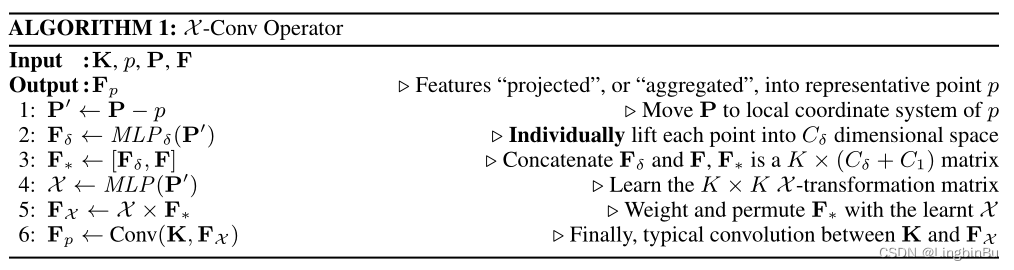
算法1中的第4-6行主要表述了等式1b( X \mathcal{X} X-transformation)。
算法1中的第1-3行中,将邻域点都归一化到点 p p p的相对位置上,从而获得局部特征。在输出特征时,需要邻域点和对应的特征一起确定,但是局部坐标的维度和表示与对应的特征不一样。为了解决这个问题,首先将坐标提升到更高的维度上和更抽象的表示(如算法1的第2行所示),然后将其与对应的特征进行拼接(算法1的第3行),用于后面的处理(图3 c)。

通过point-wise
M
L
P
δ
(
⋅
)
M L P_{\delta}(\cdot)
MLPδ(⋅)将坐标映射为特征,这与PointNet中使用的方法相似,不同之处就是没有使用对称函数进行处理。本文通过
X
\mathcal{X}
X-transformation对坐标和特征进行赋权和排序,这个
X
\mathcal{X}
X-transformation是通过所有的相邻点共同学习得到的。最终的
X
\mathcal{X}
X依赖于点的顺序,这是期望的,因为
X
\mathcal{X}
X应该根据输入点排列对
F
∗
\mathbf{F}_{*}
F∗进行排序,因此必须知道特定的输入顺序。对于没有任何附加特性的输入点云,即
F
\mathbf{F}
F为空,第一个
X
\mathcal{X}
X-Conv层只使用
F
δ
\mathbf{F}_{\delta}
Fδ。因此,PointCNN可以以鲁棒通用的方式处理有或没有附加特性的点云。
X
\mathcal{X}
X
PointCNN Architectures
Conv layers in grid-based CNNs 和 X \mathcal{X} X-Conv layers in PointCNN有两个方面不同:
- 局部特征提取的方式不同( K × K K \times K K×K patches vs. 表示点附近的 K K K个相邻点)
- 从局部区域中学习的方式不同(Conv vs. X \mathcal{X} X-Conv)
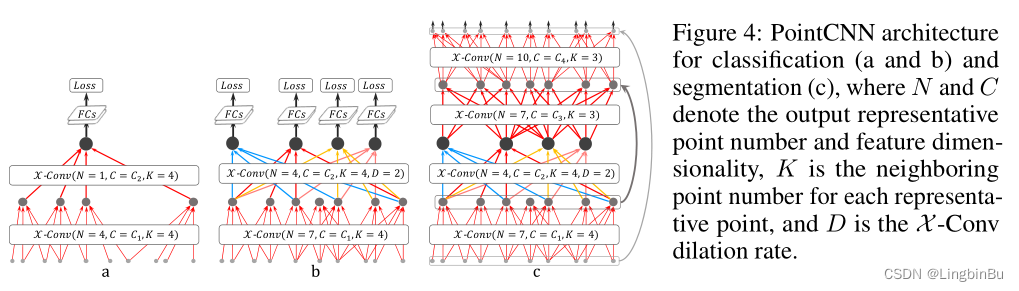
图4(a)描述了一个带有两个 X \mathcal{X} X-Conv层的PointCNN结构,将输入点(带或不带特征)逐渐变成很少的表示点,但是这些点具有丰富的特征。在第二个 X \mathcal{X} X-Conv层后,仅剩下一个表示点,这是从前面那些层中所有点的信息聚合在一起的表示点。在PointCNN中,可以将每个表示点的感知域定义为一个比例 K / N K/N K/N,其中 K K K是相邻点的数量, N N N是之前那一层中点的数量。这样,最后的那个点可以“看到”之前所有层的点,因此其感知域的比例为1.0——它具有整个形状的全局视野,并且其特征对于形状的语义理解也是信息非常丰富。在最后的 X \mathcal{X} X-Conv层后面加上全连接层,接着跟一个损失函数便可训练这个网络。
我们注意到点的数量在上面的 X \mathcal{X} X-Conv层中下降的很快(图 4a),使得简单的网络无法全面地进行训练。为了解决这个问题,提出了带有稠密连接的PointCNN模型,如图4b所示。在 X \mathcal{X} X-Conv层中保留了更多的表示点。但是,我们的目标是保持网络的深度不变,同时保持感知域的增长率,只有这样深层的表示点才能“看到”整个形状的更大区域。因此,在PointCNN中使用了从grid-based CNNs借鉴而来的dilated convolution思想。不再以固定的 K K K个相邻点作为输入,而是随机的从 K × D K \times D K×D个相邻点中随机采样出 K K K个输入点,其中 D D D是 dilation rate。在这种情况下,在没有增加实际相邻点总数的和kernel大小的情况下,感知域比例从 K / N K/N K/N增长到 ( K × D ) / N (K\times D)/N (K×D)/N。
与图4a相比,图4b中最后的 X \mathcal{X} X-Conv层中的4个表示点都可以“看到”整个形状,因此都适合用于做预测。在测试阶段,softmax之前可以将多个预测结果取平均数,使预测结果更加稳定。
对于分割任务,需要输出原分辨率的点,这可以通过构造Conv-DeConv结构实现,其中DeConv部分就是将全局信息传播到更高分辨率预测的过程,见图4c。值得注意的是,PointCNN分割网络中的“Conv” 和 “DecConv”都是相同的 X \mathcal{X} X-Conv操作。“Conv” 和 “DeConv”之间唯一不同的便是后者的输出具有更多的点,更少的通道数。
在最后的全连接层前面使用dropout减少过拟合现象,还使用了subvolume supervision进一步减少过拟合。在最后的 X \mathcal{X} X-Conv层中,感知域比例被设置为小于1的数,以便于仅有部分信息被表示点观察到。在训练过程中,该网络被要求更艰难地从部分信息中学习,这样在测试时就会表现得更好。在这种情况下,表示点的全局坐标很重要,因此通过 M L P g ( ⋅ ) MLP_{g}(\cdot) MLPg(⋅)将全局坐标提升到特征空间 R C g \mathbb{R}^{C_g} RCg,并拼接到 X \mathcal{X} X-Conv中,以便通过后续层进行进一步处理。
Data augmentation
为了提高泛化性,提出对输入点进行随机采样和shuffle,这样batch与batch间相邻点集和顺序就会不一样。为了训练一个数量为 N N N的点作为输入,选择 N ( N , ( N / 8 ) 2 ) \mathcal{N}(N,(N/8)^2) N(N,(N/8)2)个点用于训练,其中 N \mathcal{N} N表示高斯分布,这样做对于PointCNN的训练至关重要。
实验
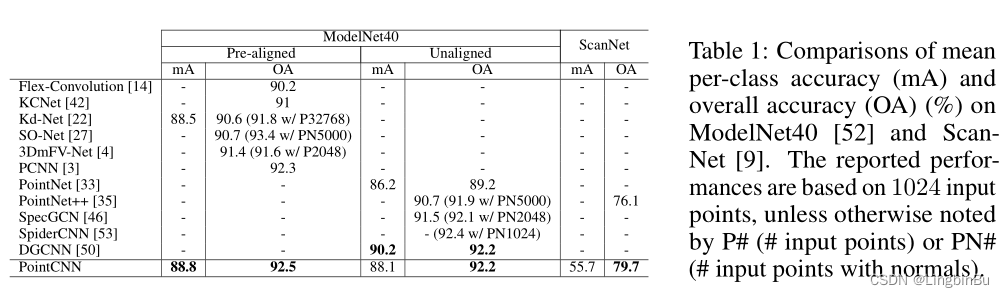
Classification

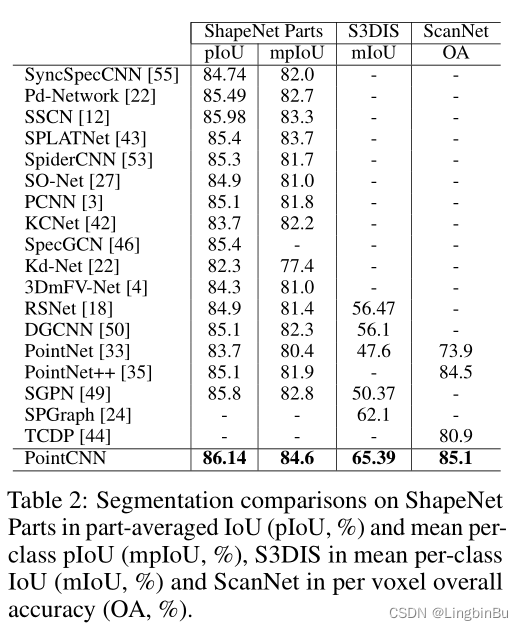
Segmentation
Ablation Experiments

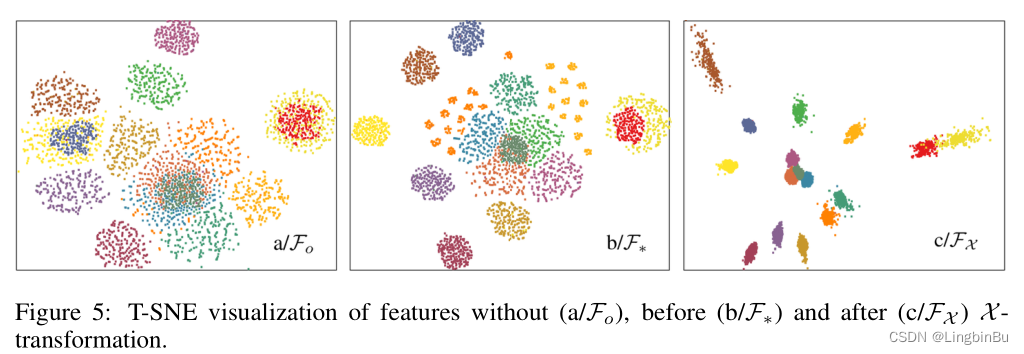
Visualizations
Optimizer, model size, memory usage and timing

结论
- 如何理解提出网络的有效性还是一个很大的问题
- 将PointCNN 与 imageCNN结合起来处理成对的点云和图像也是一个很有趣的领域















 167
167











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









