







一:进一步学习了
今天学习下VisionMaster中的圆查找,相当于就是拟合圆心,这个在视觉软件中的应用也是非常广泛的,通常用于定位,测量项目
二:开始学习
1:什么是圆查找?
圆查找模块是用于查找指定区域的圆,并且会输出该圆的相关参数信息,比如圆中心点,圆半径,圆是否存在等信息
2:圆查找的应用场景是哪些?
在自动化产线中,圆查找工具常用于定位圆形工件(如轴承、垫片、孔位)的中心坐标和半径,或测量其直径是否符合公差要求。例如,检测手机Cover Glass中圆孔到边缘的距离
在机器人抓取或装配过程中,圆查找工具可提供目标圆心坐标,引导机械臂精准操作。例如,电子元件(如电容、芯片引脚)的抓取定位
三:直接上案例
1:先导入需要测试的图片集合
2:使用轮廓定位,把两个组件的线连起来,这里是需要设定模版匹配功能,这样图像不管怎么旋转都能准确定位图像位置,具体操作步骤可以参考前面课程
3:拖入位置修正功能:这个非常重要,这里也不提了,可以参考上一篇笔记
4:拖入圆查找模块
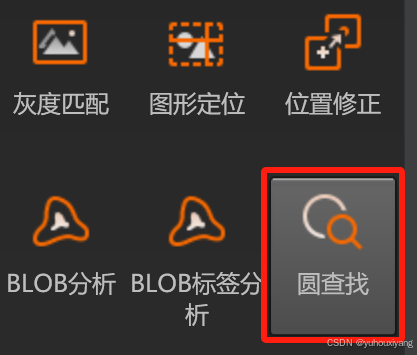
5:双击组件,开始设定参数
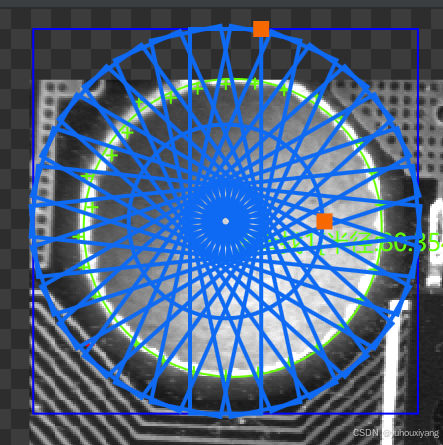
(1):首先得先画ROI:一般都是画圆环 ROI内圆在需要查找的圆内,ROI外圆在圆外
(1):ROI选中位置修正,并且修正信息需要选择刚刚创建的位置修正组件输出信息,这里的话后续的检测窗口一般都需要做这一步,因为大部分的应用场景都是需要用到实时跟踪的
(2):设定参数:

1):扇形半径:如果ROI一开始没画好,这里也可以调整,就是控制内圆和外圆的半径尺寸
2):边缘类型:
最强:检测边缘黑白梯度变化最大的边缘点集合拟合成圆
最后一条:与圆心距离范围最大的边缘点集合拟合成圆
第一条:与圆心距离范围最小的边缘点集合拟合成圆
3):边缘极性:
从黑到白:从圆心到外方向,检测到黑到白的边缘点拟合成圆
从白到黑:从圆心到外方向,检测到白到黑的边缘点拟合成圆
任意极性:上面描述的两种边缘都检测然后拟合成圆
4):边缘阈值:边缘梯度,只有实际的边缘梯度数值大于这个设定值,才会有效检测到边缘
5):滤波尺寸:用来抑制边缘噪声,如果边缘比较清晰,则减少该值,否则需要增大
6):卡尺数量:就是圆方向扫描的检测框的数量,数值越小,则检测框数量越少
7):剔除点数:和高级参数里面的剔除距离搭配使用的,就是过滤较远的边缘点,让拟合圆心出来的轮廓更加接近
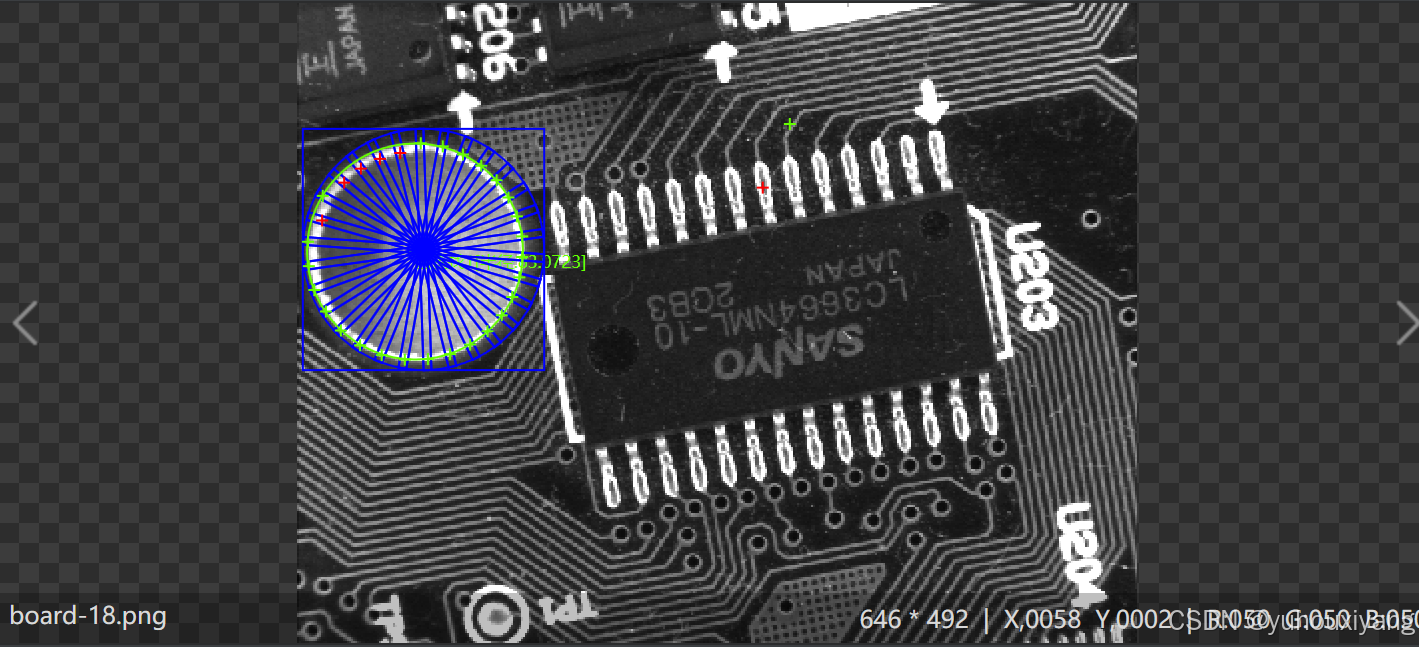
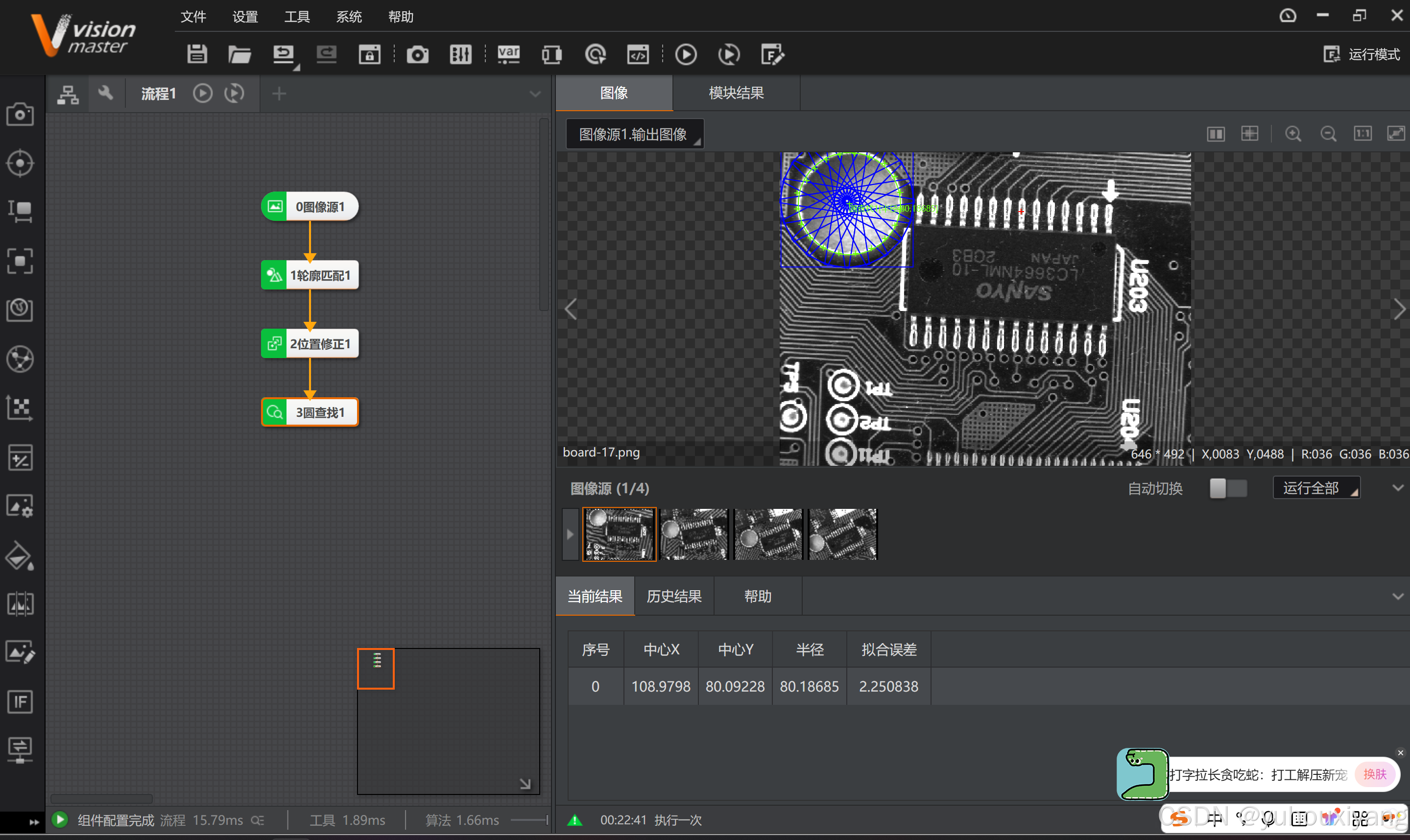
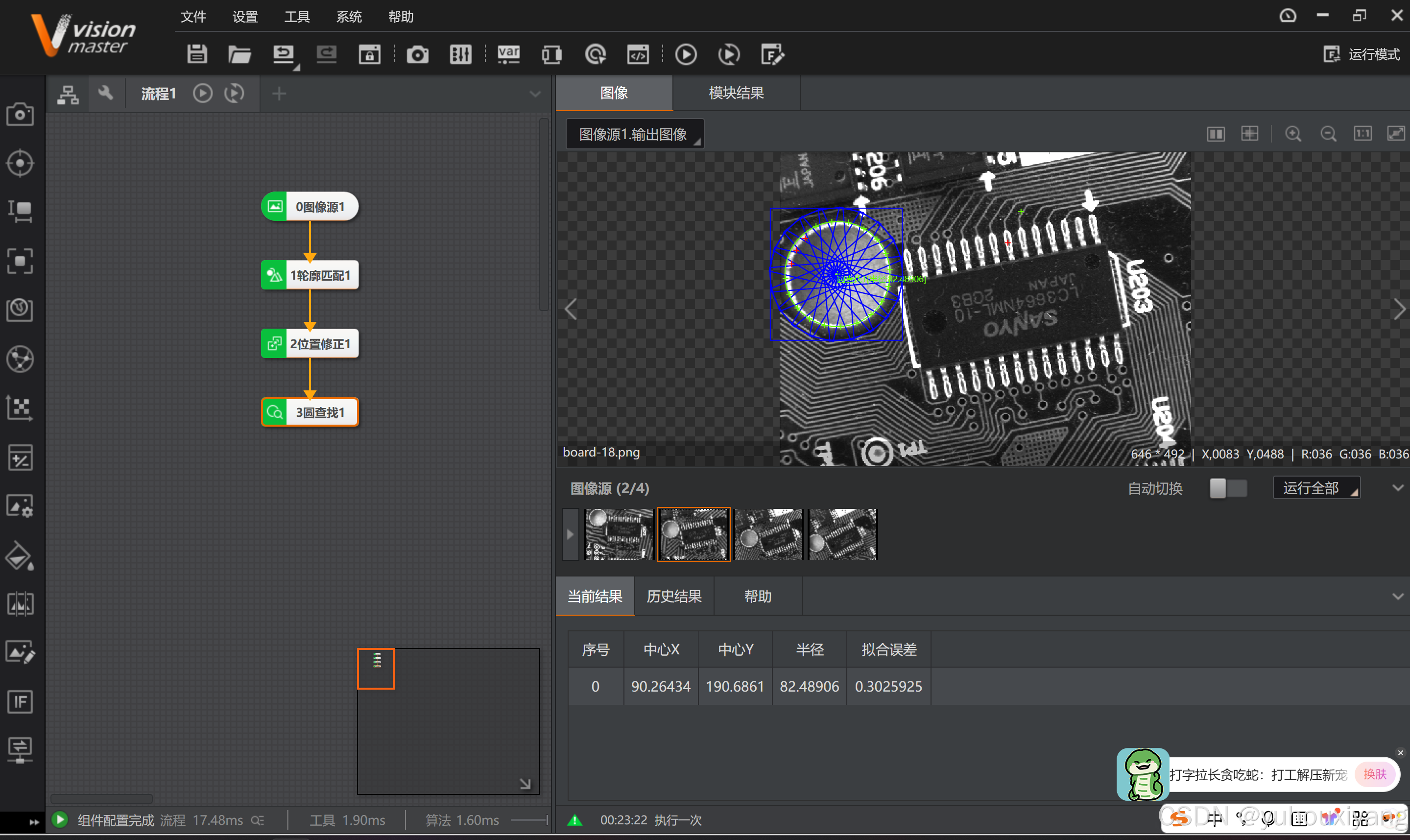
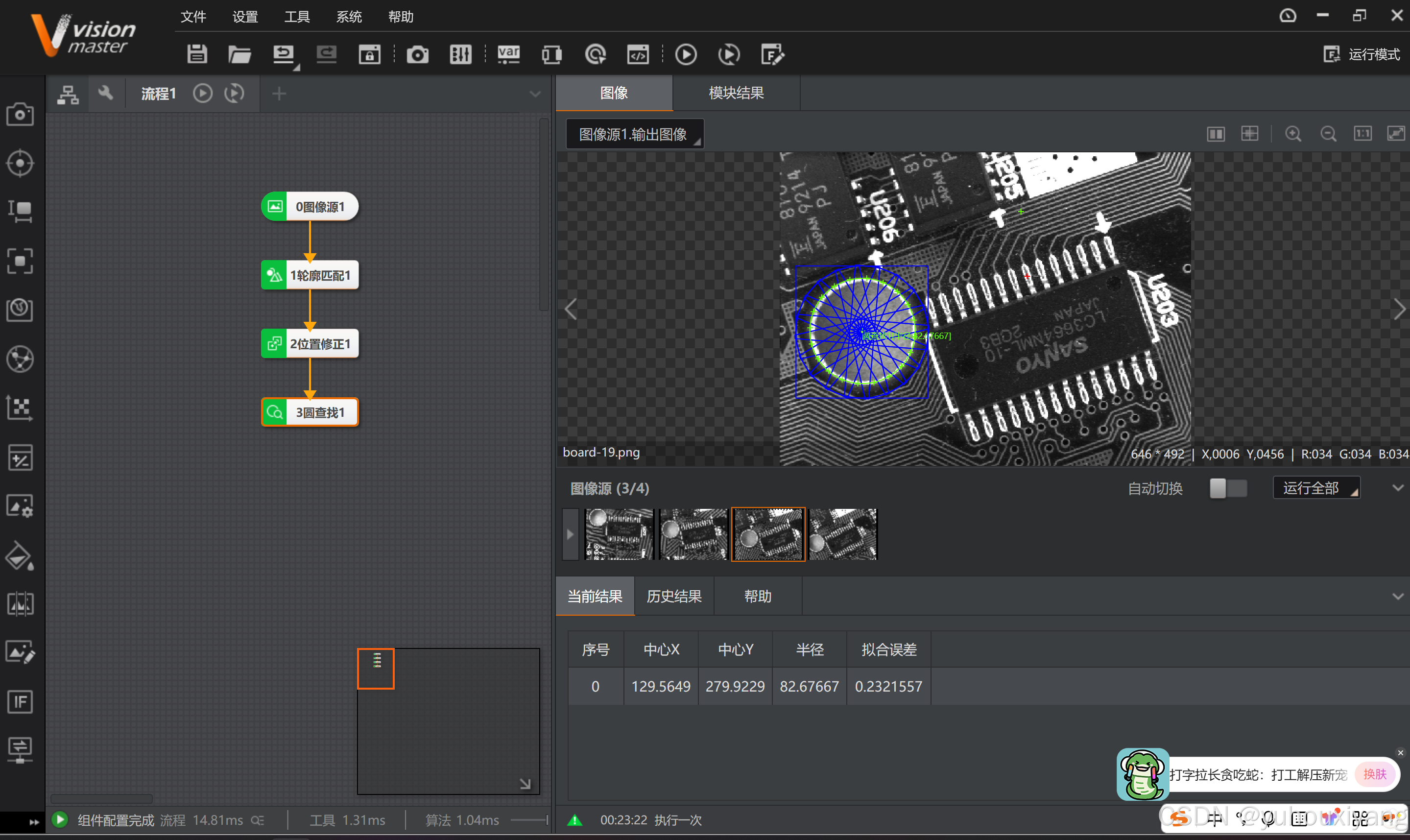
四:实测:上述设定好参数,开始实际测量看看效果


















 2062
2062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











