






 本文详细介绍了电机驱动电路的基本构成、续流二极管的作用、半桥和全桥控制方法,以及电机运行的不同状态(正转电动、再生制动、短接制动、反接制动)。此外,还讨论了死区时间的概念和L298N和集成驱动MC33886在入门级应用中的实例。
本文详细介绍了电机驱动电路的基本构成、续流二极管的作用、半桥和全桥控制方法,以及电机运行的不同状态(正转电动、再生制动、短接制动、反接制动)。此外,还讨论了死区时间的概念和L298N和集成驱动MC33886在入门级应用中的实例。
电机驱动电路
电机驱动电路的构成方式
为了避免电机驱动电路中发生过压现象,可在电机两端反并联一个二极管,开关导通时,二极管反向截止,开关断开时,二极管导通并与电机形成一个闭合回路,电流得以延续,因此该二极管也可称为续流二极管。
为了适应开关管快速通断的特性,通常这种二极管为开关特性好、反向恢复时间短的快恢复二极管。但再好的二极管也存在一定的反向恢复时间,因此干扰问题无法完全消除。有驱动方案在MOS管外人为添加了体外反并联肖特基二极管进一步提升续流能力,降低干扰,但这种方案的实用性还有待进一步的考察。
两种常见的电机驱动拓扑结构
半桥控制方式:上下两个开关管交替导通,可通过调节交替导通所占的比例实现电机调速。
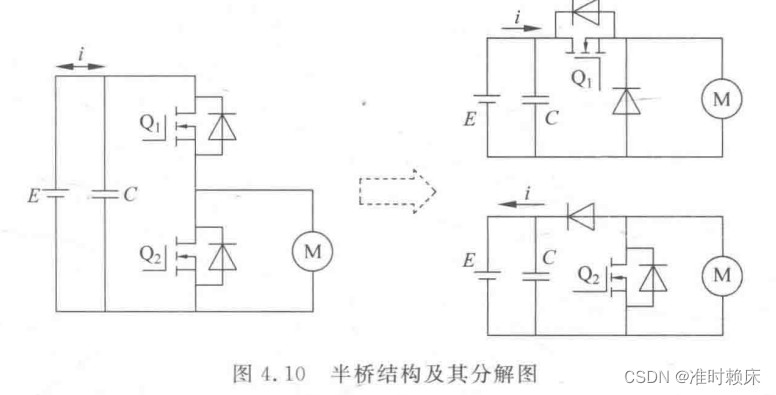
全桥结构的电机驱动电路如图4.11所示,当斜对角线的开关管同时导通时,可以分别控制电机正转和反转,且允许电机处于再生制动状态,从而实现了电动机的双向四象限运行。为了便于理解,可将全桥结构分解为右图所示的半桥加开关的形式,即当Q3导通、Q4关断时,电路构成一个与图4.10一致的半桥结构,反之则构成一个可视为电池反接后的半桥结构。
智能车采用的桥式电路通常为全桥电路中的单极性,同频式电路,功率器件采用全控型(通过控制信号既可以控制其导通,又可以控制其关断的电力电子器件。输入阻抗高,驱动电路简单,需要的驱动功率小;开关速度快,工作频率高。)MOSFET,开关方式通常为硬PWM驱动。
全桥硬开关同步整流PWM驱动设计 - 知乎 (zhihu.com)
电机驱动电路运行模态分析
正转电动状态
电机处于正转电动状态时,H桥驱动电路的各个开关管的状态为Q常开,Q;常关,Q:和Q2交替导通(可通过输出一对互补的PWM信号进行控制)。其对应的电流分析与波形图如图4.18所示,当Q导通.Q2关断时,电池通过Q1和Q3向电机提供能量,其电流流动情况如左图中①所示;当Q2导通、Q1关断时,电机通过Q2和Q3进行续流,其电流流动情况如左图中②所示。对应iq1至iq4 的波形如右图所示,由于电机在续流过程中产生一定的能量损失,因此即使在电机稳态电动运行时,也会在恒定电流基础上产生一.定的电流变化,具体表现为当Q导通时,其电流呈略微线性增加,当Q2导通时,其电流呈略微线性下降,在iq3上则呈现为周期上升、下降规律,且流经电机电流ia等于iq3。由于Q4在整个过程中保持关闭,因此流经它的电流始终为0。电机的整个运行过程可以看作一个BUCK降压电路的运行过程,但是不同之处在于BUCK电路依靠续流极管续流,而H桥的续流通道主要依靠MOSFET开关管,从而有助于提高系统的运行效率。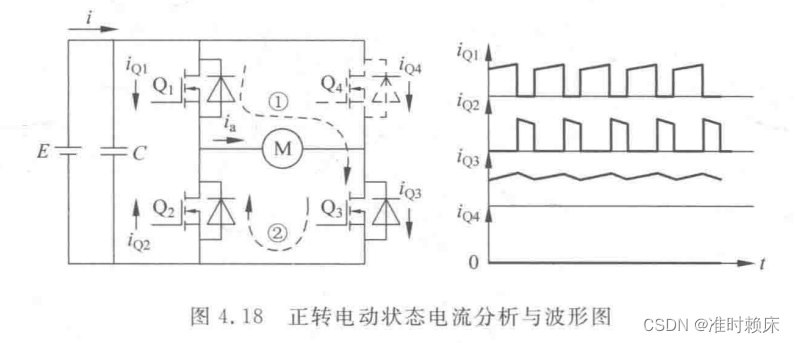
正转再生制动状态
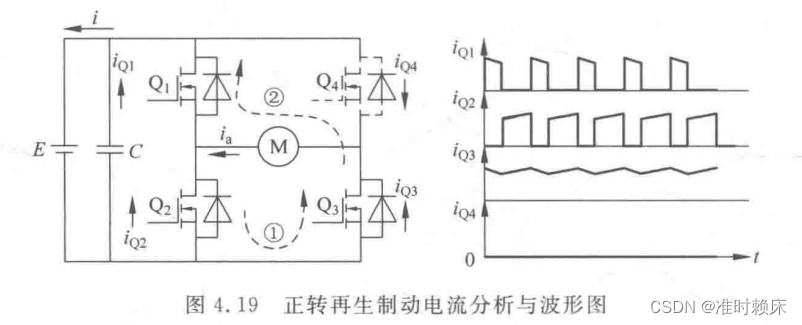
电机正转时发生再生制动的电流分析与波形如图4.19所示,其控制规律与电机正转相同,但是从图中可以看出,其电流方向与之前相反,当Q2导通、Q1关断时,电机与Q2和Q3共同构成一个闭合回路,其电流流动情况如左图中①所示;当Q1导通、Q2关断时,电机通过Q和Q3向电池输送电能,其电流流动情况如左图中②所示。对应iq1至q4的波形如右图所示,由于电机此时处于发电状态,当Q2导通时,其电流呈略微线性增加(类似于BOOST电路中向电感充电状态),当Q1导通时,其电流呈略微线性下降,在iq3上则呈现为周期下降、上升规律,且流经电机的电流ia等于iq3。同样,由于Q4在整个过程中保持关闭,因此流经它的电流为始终为0。
正转短接制动状态
当电机正转电动运行时,还可以通过同时导通Q2和Q3或同时导通Q1和Q4实现短接制动,但在实际智能车竞赛中,单独采取短接制动并无必要。其原因在于,首先这种短接制动中并未串接制动电阻,虽然智能车采用的直流电机和驱动电路往往可以承受这种短接电流,但是其制动效果又弱于反接制动;其次,智能车的电机转速控制通常采用闭环调节方案,它是一个连续调节的过程,当Q2导通时间占绝对优势时,对应Q1导通时间很短,此时也可看作短接制动状态,只是在这个自动的占空比调节过程中,电机须从电动状态先变为再生制动状态,再变为短接制动,整个过程为一个连续的、不可分割的过渡变化过程.
正转反接制动状态
在进行反接制动时,可以将电机两端电压进行反接,从而快速改变电机电流方向,对应的电机力矩也反向,达到紧急制动的目的。具体的做法是,令H桥驱动电路中的Q2常开;Q1常关,并令Q3和Q4交替导通。这里简单介绍下为什么不令Q4常开、Q3常关并令Q1和Q2交替导通。单从电路结构看,其产生的电机驱动效果与之前的方式并无区别,但是重点在于Q4位于右桥臂的上部,从电机驱动电路角度看,由于智能车竞赛中通常使用带有自举电容的半桥或全桥驱动芯片(只需一路电源供电,设计简单),其自举电容是依靠下管导通时充电的,因此若让Q3处于常关状态,Q4也将无法正常工作。
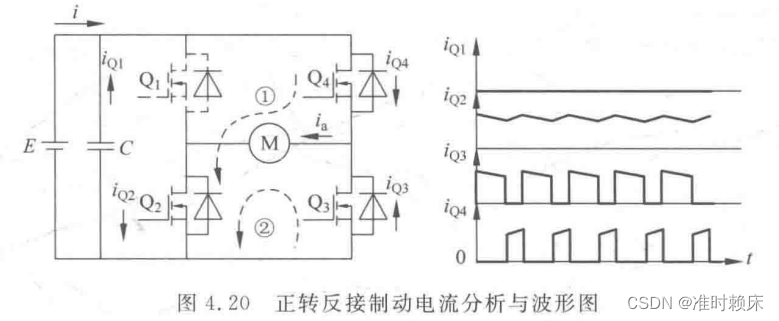
电机正转时发生反接制动的电流分析与波形如图4.20所示,当Q4导通,Q3关断时,电池通过Q4和Q2向电机提供电能,其电流流动情况如左图中①所示;当Q3导通,Q4关断时,电机通过Q2和Q3进行续流,其电流流动情况如左图中②所示。对应iq1至iq4的波形如右图所示,其变化趋势与电机正转电动类似,只是开关管对应的电流发生了变化,当Q4导通时,其电流呈略微线性增加,当Q3导通时,其电流呈略微线性下降,从而在iq2上呈现为周期下降、上升规律,且流经电机的电流ia等于iq2。由于Q1在整个过程中保持关闭,因此流经它的电流为始终为0。
电机的运行状态总结如下:在大部分情况下,智能车电机运行在正向电动状态,在进人弯道需要减速或进人下坡道时,电机可运行在再生制动情况下,并在占空比达到调节极限时可进人短暂的短接制动状态;再生制动可使电机的机械能以电能形式重新存人电池中,但该转换过程的效率有限,将伴随有热量释放;再生制动和短接制动的制动能力有限,主要适用于带有预测性和计划性的小幅度减速,当智能车需要进行大幅度的降速运行时,则需使用反接制动;但是,反接制动是通过在短时间内同时消耗电机和电池上的能量实现的,其释放途径主要施加在闭合回路中的寄生电阻上,因而电机会出现较大的发热。
死区
同一桥臂上下开关管的互补导通与关断是连续进行的,这在电路分析与仿真中是没有问题的,但是在实际的电路中,如果直接采用连续的互补PWM信号,由于信号延迟与开关延迟等原因,可能会出现同一桥臂中上下管同时导通的时刻,这是要绝对避免的,否则会导致电源短路,从而烧毁开关管或线路板,这种现象称为直通(Shoot-Through)。因此,为了确保驱动电路的安全,通常在控制上下管的开通关断过程中加入一定的时间间隔,在该间隔内上管、下管的控制信号均为关闭状态,我们称之为停滞时间或死区时间(Blanking-TimeorDead-Time),其通常为数百纳秒至数微秒级。
以电机正转电动状态为例,如图4. 22所示,其中oulVql和Vq2分别代表施加在Q1和Q2开关管上的PWM信号,当加入停滞时间后,可以看到二者在高低电平变化前后插入了一定时间间隔。相应地,当电池向电机传输电能时,流经Q1的电流iq1与Vq1高电平保持同步,当电机进入续流状态时,流经Q2开关管中晶体管的电流iq2_τ与Vq2高电平保持同步,而在停滞时间内,由于开关管Q1和Q2都处于关闭状态,在电机电流的作用下,Q2开关管中的反并联二极管导通并进行续流,流经该二极管的电流iq2_d如图4.22所示。由于常见开关管都在体内集成了体二极管,因此开关管外引脚所获得的电流是iq2_t与iq2_d之和,其结果与图4.18类似,图4.22则是为了帮助读者进一一步加深对电机驱动桥工作过程的认识和体会,并了解在PWM信号中加人停滞时间后,开关管中反并联二极管的作用。
电机驱动电路设计方案
入门级电机驱动电路方案
L298N与电调
L298N 电机驱动板 - 详细介绍 - 知乎 (zhihu.com)
L298N 电机驱动板 - 详细介绍_l298n驱动步进电机参数-CSDN博客
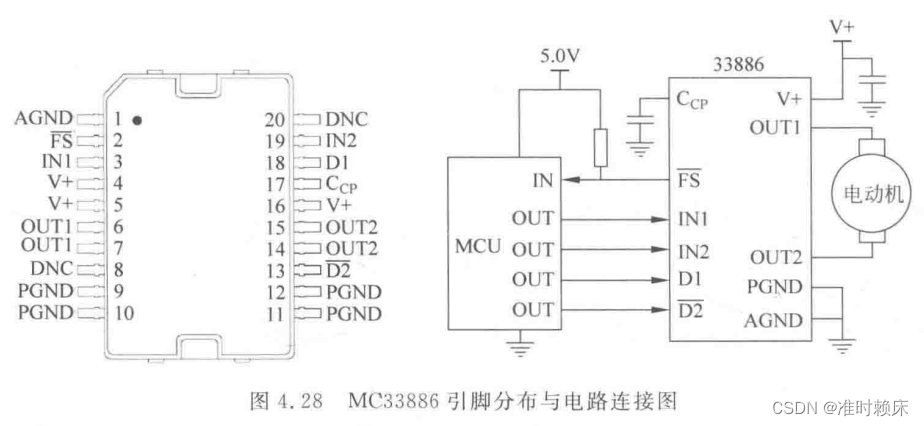
集成驱动MC33886


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









