









图像平滑处理:
归一化块(均值)滤波器:
blur(src, dst_blur, Size(i, i));
高斯滤波器:
GaussianBlur(src, dst_GaussianBlur, Size(i, i), 0, 0);
中值滤波:
medianBlur(src, dst_medianBlur, i);
双边滤波:
bilateralFilter(src, dst_bilateralFilter, i, i * 2, i / 2);

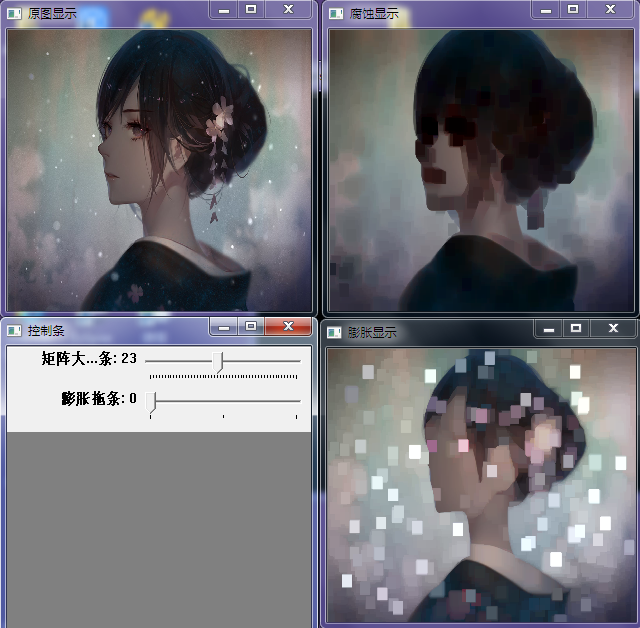
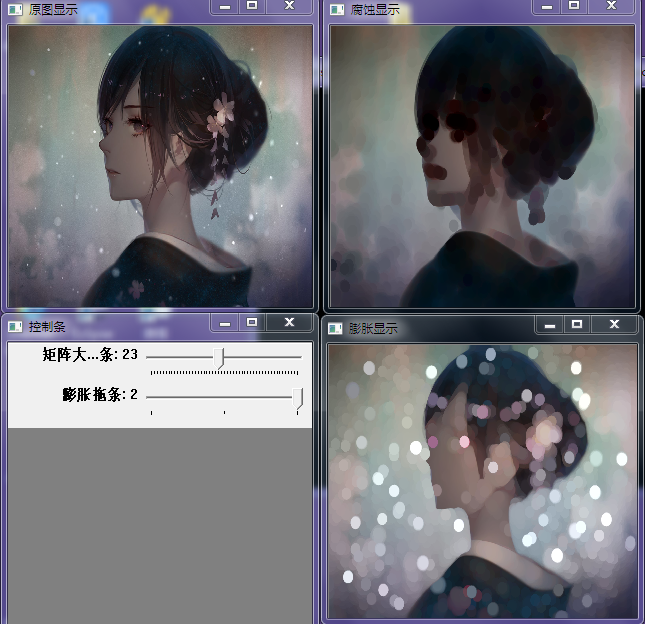
腐蚀和膨胀:
src:原始图,dst:输出图,kernel内核:矩形 交叉形 椭圆形
kernel = getStructuringElement(k, Size(1,1));
k = 0 , 内核形状矩形 k=1,内核形状交叉性 k=2,内核形状椭圆形
size 改变内核的大小
腐蚀操作: erode(src,dst,kernel)
膨胀操作:dilate(src,dst,kernel)
第一个拖条控制内核的大小,第二个拖条控制内核的形状

更多形态变化:
kernel是内核形状,和上面相同
operation为运算方式:
operation=2:开运算
operation=3:闭运算
operation=4:形态梯度
operation=5:顶帽
operation=6:黑帽
morphologyEx(src2, dst, operation, kernel);





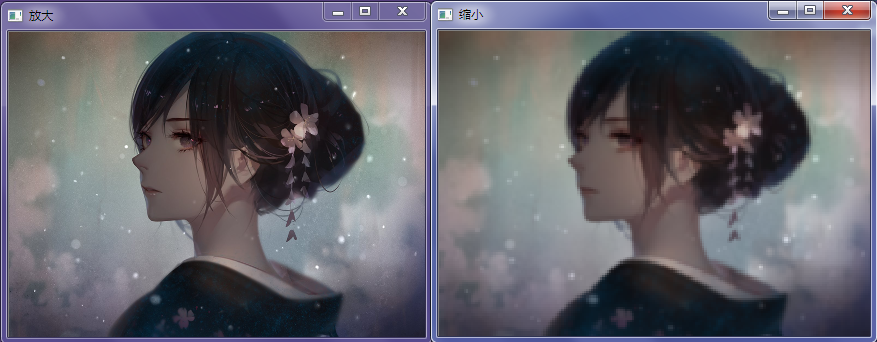
放大和缩小:
放大:pyrUp(temp, dst_Up, Size(temp.cols * 2, temp.rows * 2));
缩小:pyrDown(temp, dst_Up, Size(temp.cols / 2, temp.rows / 2));
图片Size小了但还用原来的Size显示出来所以就模糊了
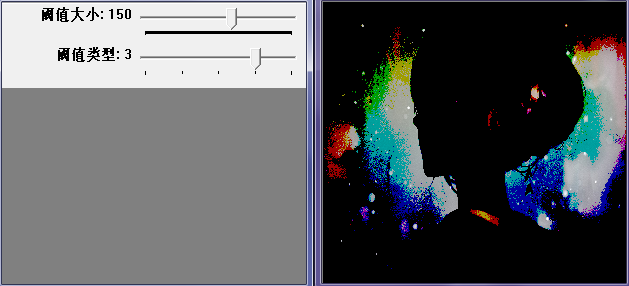
阈值操作:
threshold_value阈值,threshold_type 0-4, 7,8,16使用了有错误
threshold(src2, dst_Threshold,threshold_value,255,threshold_type);
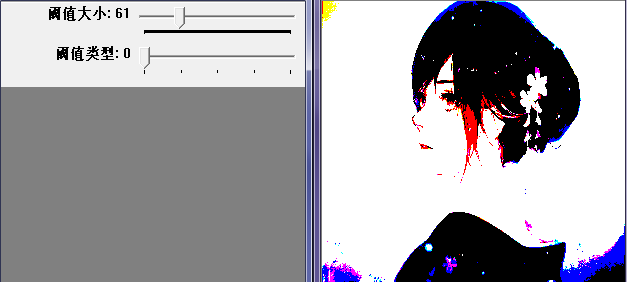


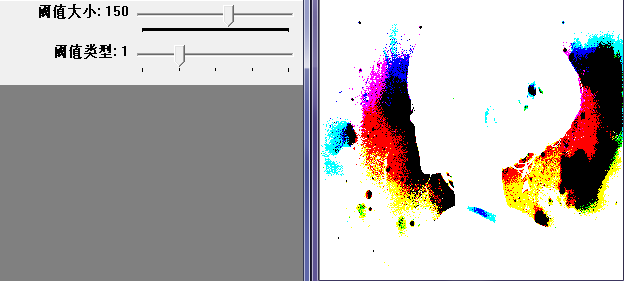
(值越大图恢复过来了)





让边缘更加明显:
Sobel 导数:Sobel算子结合高斯平滑和微分,用于抗噪音。
CV_EXPORTS_W void Sobel( InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize = 3, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT );

/// 求 X方向梯度
//Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT );
Sobel(Arithmetic_Src, grad_x, ddepth, 1, 0, 3);
convertScaleAbs(grad_x, abs_grad_x);
/// 求Y方向梯度
//Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
Sobel(Arithmetic_Src, grad_y, ddepth, 0, 1, 3);
convertScaleAbs(grad_y, abs_grad_y);
/// 合并梯度(近似)
//addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad);
double a = alpha / 100.0;
double b = beta / 100.0;
double c = gamma / 100.0;
addWeighted(abs_grad_x, a, abs_grad_y,b, gamma, grad); 计算X,Y方向梯度,再合并起来。下图可以看出,xy的鼻子上下和衣领 是不同的。
Laplacian算法:size参数越大,图片轮廓越不清 晰,内核深度2为 CV_16U ,3为CV_16S
可以看出内核深度高的,轮廓也会相对明显。CV_EXPORTS_W void Laplacian( InputArray src, OutputArray dst, int ddepth, int ksize = 1, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT );
Canny算法:有2个构造函数,区别就是输入图像不同;
/** @param image 8-bit input image. @param edges output edge map; single channels 8-bit image, which has the same size as image . @param threshold1 first threshold for the hysteresis procedure. @param threshold2 second threshold for the hysteresis procedure. @param apertureSize aperture size for the Sobel operator. @param L2gradient a flag, indicating whether a more accurate \f$L_2\f$ norm \f$=\sqrt{(dI/dx)^2 + (dI/dy)^2}\f$ should be used to calculate the image gradient magnitude ( L2gradient=true ), or whether the default \f$L_1\f$ norm \f$=|dI/dx|+|dI/dy|\f$ is enough ( L2gradient=false ). */ CV_EXPORTS_W void Canny( InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize = 3, bool L2gradient = false ); /** \overload Finds edges in an image using the Canny algorithm with custom image gradient. @param dx 16-bit x derivative of input image (CV_16SC1 or CV_16SC3). @param dy 16-bit y derivative of input image (same type as dx). @param edges,threshold1,threshold2,L2gradient See cv::Canny */ CV_EXPORTS_W void Canny( InputArray dx, InputArray dy, OutputArray edges, double threshold1, double threshold2, bool L2gradient = false );
霍夫线变换
统计概率霍夫线变换
直方图均匀化:
左图为载入的灰度图像,右图为直方图均匀化后的图像。
cvtColor(Histogram_Src, Histogram_Dst, CV_BGR2GRAY); equalizeHist(Histogram_Dst, dst);















 3887
3887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









