






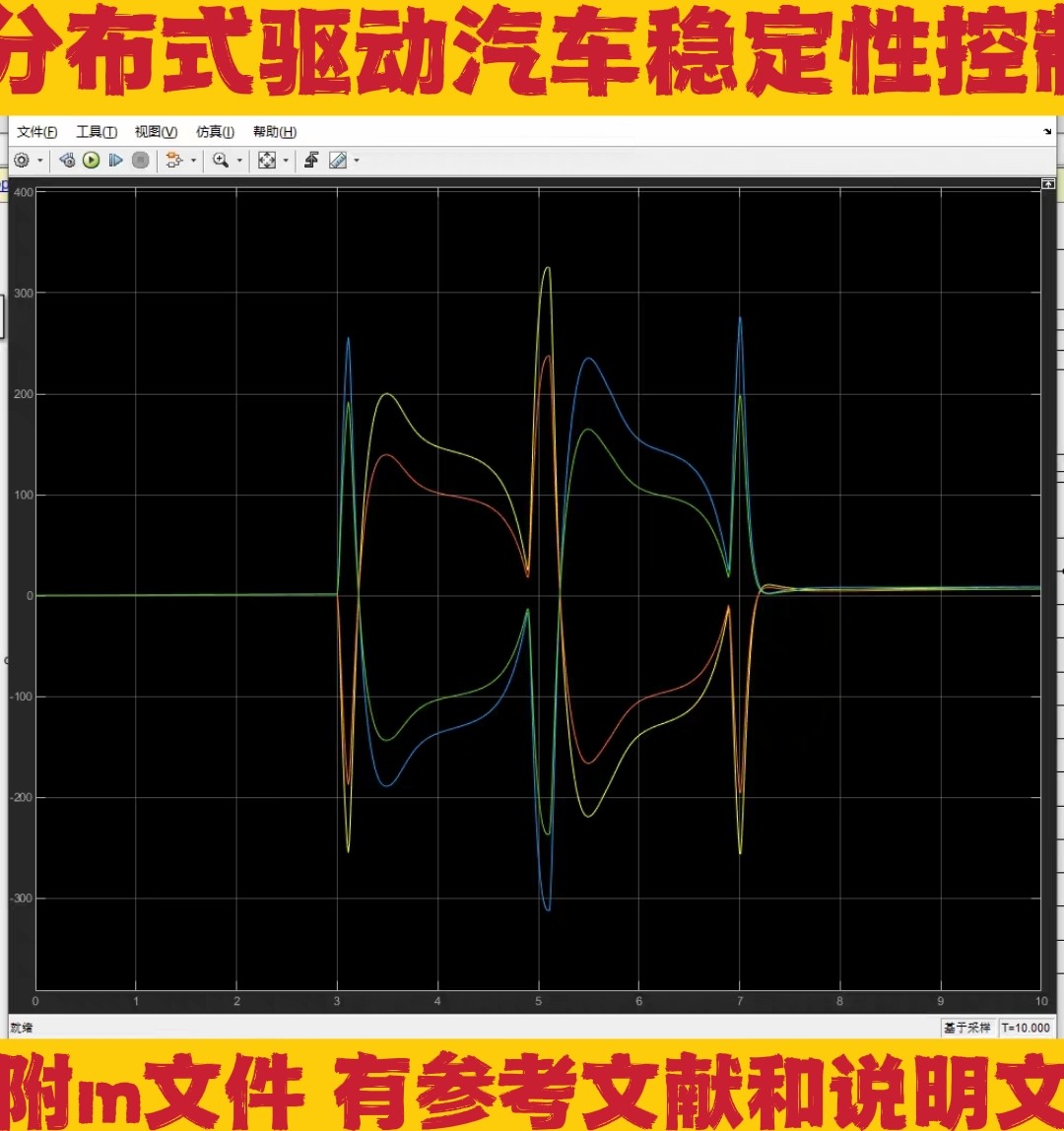
分布式驱动汽车稳定性控制。
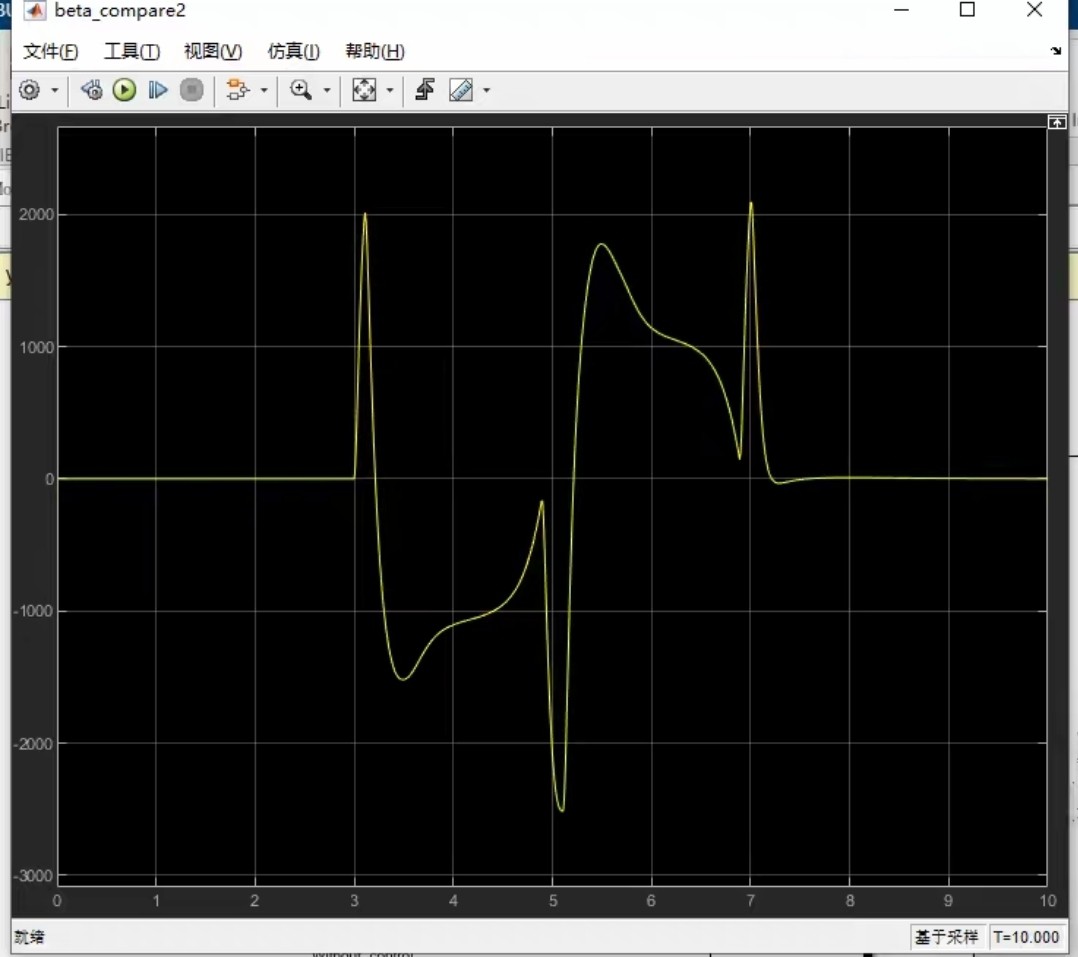
采用分层式直接横摆力矩控制,上层滑模控制,下层基于轮胎滑移率最优分配。
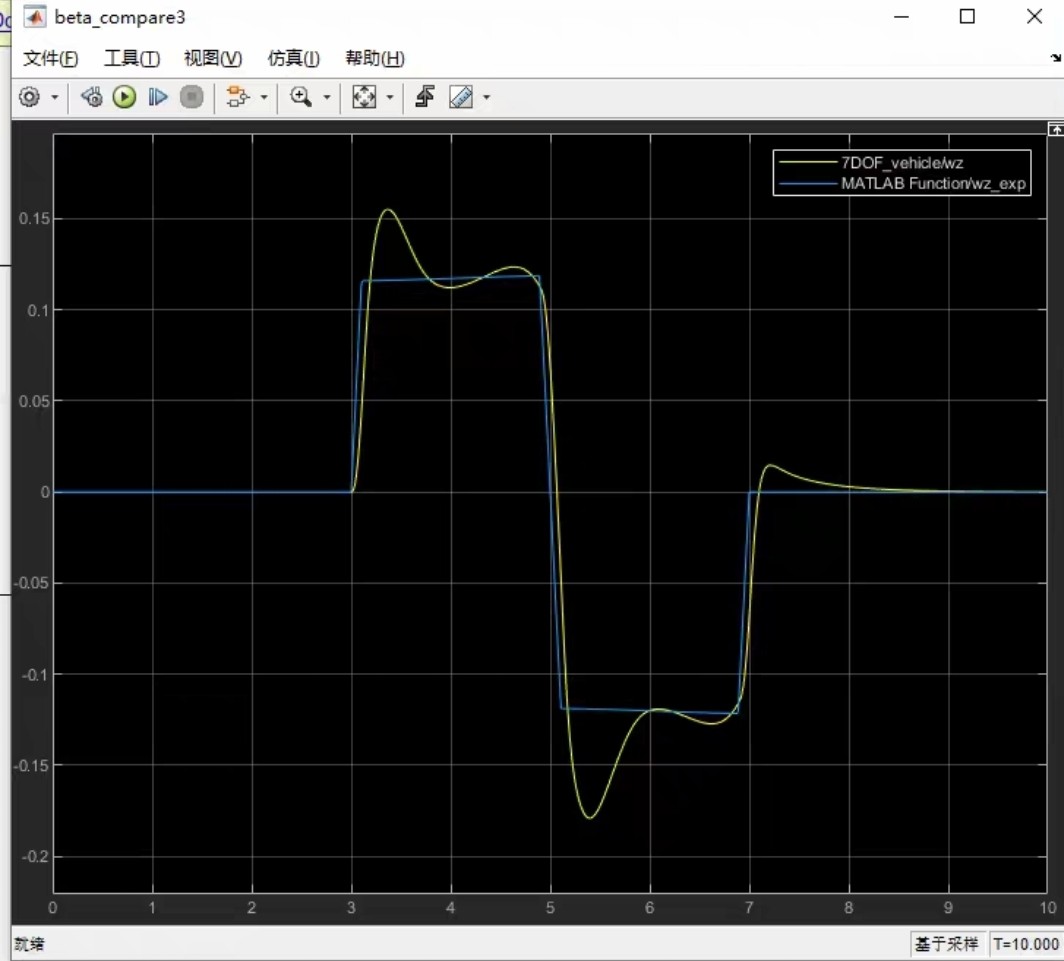
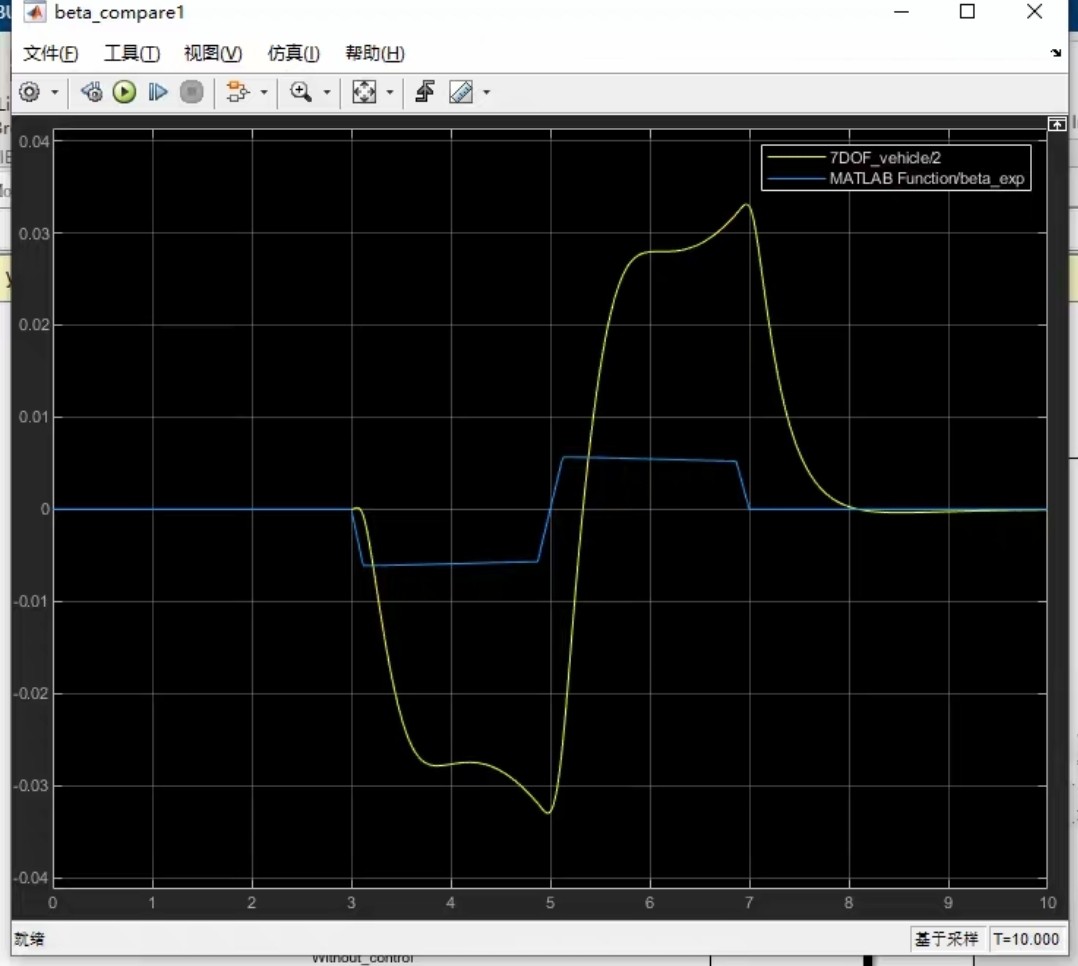
滑模控制跟踪横摆角速度和质心侧偏角误差。
七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
附m文件,有参考文献和说明文档
ID:238712846493052
暗夜灵现
分布式驱动汽车稳定性控制是实现车辆在行驶过程中保持稳定性的关键技术之一。在现代汽车中,分布式驱动技术已经得到广泛应用,它可以使车辆在各种路况下保持良好的操控性能和行驶稳定性。本文将介绍一种基于分层式直接横摆力矩控制的分布式驱动汽车稳定性控制方法,并分析其原理和实现过程。
分层式直接横摆力矩控制是一种将横摆力矩控制分为上层控制和下层控制两个阶段的方法。上层控制采用滑模控制方法,用于跟踪横摆角速度和质心侧偏角误差。滑模控制是一种基于滑模面的控制方法,它通过引入一个滑模面来实现对系统状态的跟踪和控制。在分布式驱动汽车稳定性控制中,滑模控制可以有效减小车辆的侧偏角误差,提高驾驶稳定性。
下层控制采用基于轮胎滑移率最优分配的方法,用于实现横摆力矩的控制。轮胎滑移率是指轮胎与地面之间的相对滑动速度与轮胎旋转速度之间的比值。在分布式驱动汽车稳定性控制中,通过合理分配各轮的滑移率,可以最大限度地提高车辆的操控性能和行驶稳定性。基于轮胎滑移率最优分配的方法可以使各轮的滑移率达到最优状态,从而实现对车辆的稳定控制。
在分布式驱动汽车稳定性控制中,需要建立整车模型来描述车辆的动力学特性。常用的整车模型包括七自由度模型和二自由度模型。七自由度模型将车辆看作一个刚体,考虑车辆的横向运动和纵向运动。它的输出是实际的质心侧偏角和横摆角速度。而二自由度模型将车辆看作一个质点,只考虑车辆的横向运动。它的输出是理想的质心侧偏角和横摆角速度。通过对整车模型的建立和分析,可以更好地理解车辆的运动特性,为分布式驱动汽车稳定性控制提供理论支持。
综上所述,分布式驱动汽车稳定性控制是一个涉及多个层次和多个方面的技术问题。本文介绍了一种基于分层式直接横摆力矩控制的分布式驱动汽车稳定性控制方法,并分析了其原理和实现过程。通过合理分配横摆力矩和优化轮胎滑移率,可以有效提高车辆的操控性能和行驶稳定性。通过建立整车模型,可以更好地理解车辆的运动特性,并为分布式驱动汽车稳定性控制的研究提供理论支持。本文提供了相关的m文件,并附有参考文献和说明文档,供读者参考和进一步研究。希望本文对读者理解和应用分布式驱动汽车稳定性控制技术有所帮助。
【相关代码,程序地址】:http://fansik.cn/712846493052.html
















 1775
1775

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









