





分享一份经典的车载毫米波雷达算法架构
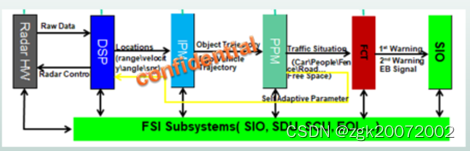
Radar HW :包括NXP 、Ti 、Calterach等
DSP:指信号处理,包括测距、测速、测角,超分辨
IPM:信息处理,包括航迹起始、关联、滤波、航迹管理、合并等
PPM:信息后处理,包括目标分类、高度分类、运动分类等
FCT:功能模块,包括BSD功能、LCA功能、AEB功能等
FSI:基础功能模块,包括自校准、诊断、EOL、输入输出等
具备全套全栈开发能力

分享一份经典的车载毫米波雷达算法架构
Radar HW :包括NXP 、Ti 、Calterach等
DSP:指信号处理,包括测距、测速、测角,超分辨
IPM:信息处理,包括航迹起始、关联、滤波、航迹管理、合并等
PPM:信息后处理,包括目标分类、高度分类、运动分类等
FCT:功能模块,包括BSD功能、LCA功能、AEB功能等
FSI:基础功能模块,包括自校准、诊断、EOL、输入输出等
具备全套全栈开发能力











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 2402
2402





