






一. 设计思路,灵感来源和使用说明
设计思路来源于老师在立项之前叫我们查看相关的一篇文献(本文最后会给链接),由树莓派(一种微型电脑)为主控,arduino(一种单片机)为副控(我们当时都不知道这两个东西是什么,树莓派?是好吃的吗?),树莓派中装入先前训练好的模型(识别垃圾的模型,本文最后会给代码链接),写一个主代码在树莓派上运行,显示屏上可以播放指定路径的视频。
1.从拍照到分类:当垃圾放在分类盒里,超声波传感器就会测出垃圾距离小于一定的值,从而触发连接在树莓派csi接口上的摄像头(值得注意的是,最好将树莓派断电后进行安装,俺就因为没断电烧坏了一个,具体看链接树莓派摄像头安装和使用)拍摄照片,等待模型处理好垃圾分类,会输出对应的垃圾名称(正确率大概只有百分之七十)。根据不同的名称会通过串口给arduino控制板输入不同的命令(如1,2,3,4分别对应别不同种类的垃圾),arduino会接受不同的命令从而给舵机不同的pwm信号,舵机会完成不一样的动作从而完成分类。
2.显示图像和分类信息:这个也是在主代码中实现的,在没有拍照之前就会开始播放视频,模型分类成功后会显示分类信息
3.满载和压缩:至于满载,我们原计划是在arduino上连上四套激光报警装置,满载后,由于垃圾挡住了激光,另一边的激光接收器接收不到激光,输出低电平使得蜂鸣器报警。但是在进行arduino编程的时候,我们不太懂代码,没有用多线程,而是将舵机控制代码和激光报警代码合并成了一个主代码,结果就成了舵机动一下,激光亮一下,蜂鸣器响一下这种毫无逻辑的运转。 后来,我们改用了用超声波测距报警,并且引用多线程的办法(具体使用链接arduino多线程使用链接)实现多个任务的同时进行。原理是距离小于一个值就触发蜂鸣器,并通过串口通信将满载信息传给树莓派的显示屏。 关于压缩,我们的想法是通过步进电机带动丝杠上的压缩板移动,垃圾在压缩板与可回收垃圾亚克力板壁(只要求压缩可回收垃圾)间被压缩。至于怎么触发压缩,我们设计的是可回收垃圾容器内的超声波报警(即满载)就能启动步进电机进行压缩。
二.硬件清单和连接
老师给的预算是不多于2000,还有就是我们担心完成不了老师不给报销,所以我们都挑的便宜的买。
清单:硬件主要有树莓派3B+及其内存卡,csi摄像头,七寸显示屏,arduino及其拓展板,亚克力板(拼多多上定制3mm厚的,感觉质量不太行)亚克力盒(用于制作分拣口),TD8120 270°舵机(家人们避坑,360度舵机会一直转,不能控制角度),sg90 180°舵机,舵机支架和设计的舵机臂,超声波传感器五个,蜂鸣器一个,杜邦线若干,两个锂电池电源(一个5伏,一个12伏),步进电机及其驱动器和丝杠,安卓数据线(不够长,比赛前临时又买了一个),arduino数据线(也是不够长,临时买了一个),升压电源稳压模块(原以为没啥用,后面连接步进电机派上了用场),usb拓展坞(电池的usb接口不够用,拿了自己电脑的拓展坞)
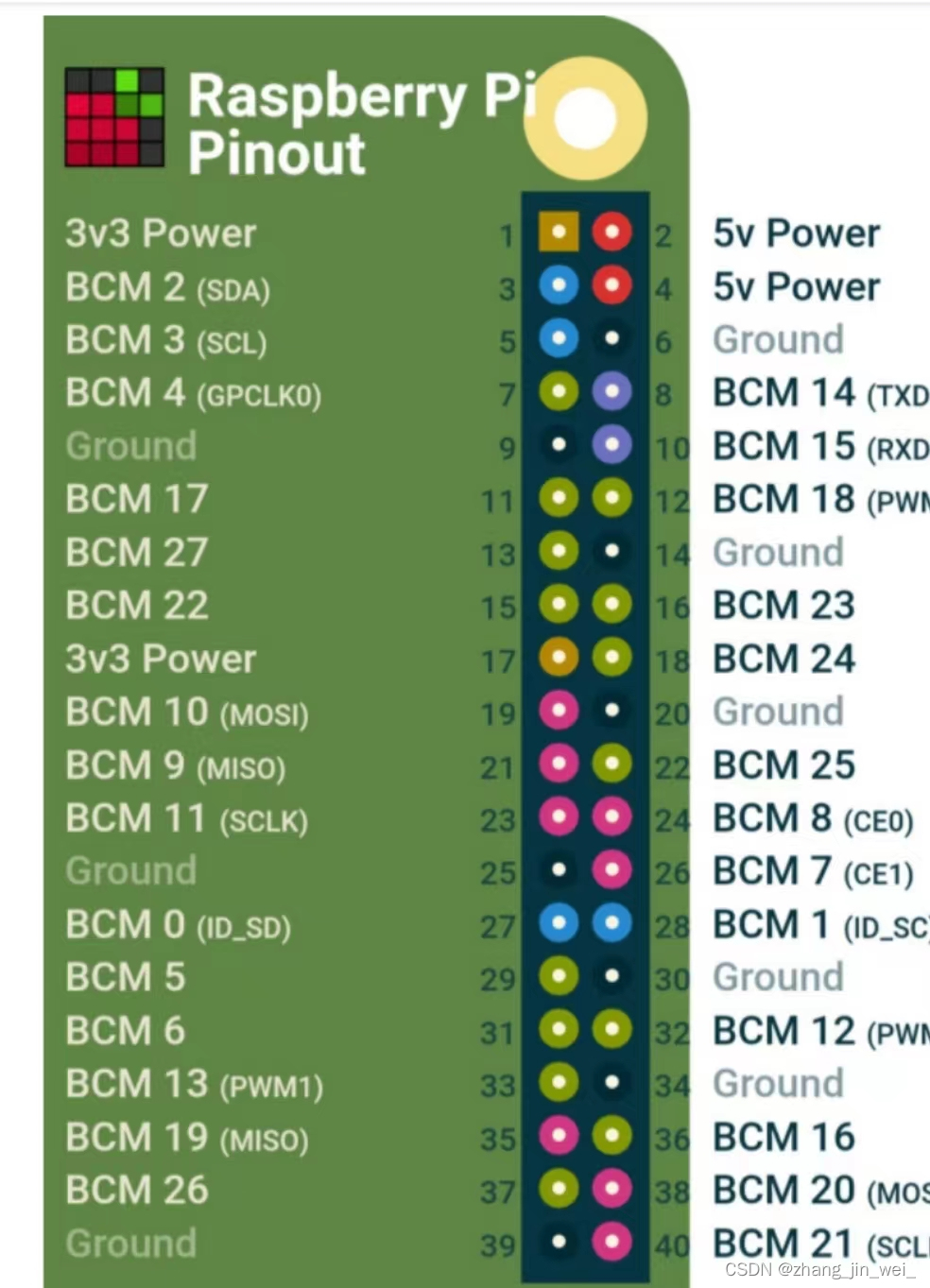
连接:1.树莓派部分,树莓派和电源通过安卓数据线连接(没错,就是上面说的不够长的那个),usb口那端连电源。树莓派和显示屏通过HDMI线和专用的安卓数据线(买显示屏送的,和普通的安卓线不太一样,usb接口段连树莓派)连接。摄像头连接上面说过了就不说了,还有树莓派上的超声波传感器连接,找图片中.........
我们代码写的是
# 超声波引脚配置
TRIG_PIN = 23
ECHO_PIN = 24即trig口连树莓派上的BCM23(物理引脚16,即图上右边那列从上往下数第八个),echo口同理,超声波另外两根线vcc和gnd接哪个都行。
2.arduino部分,这会是一个大工程。如图,舵机部分,舵机1连arduino拓展板的11接口(白线是信号线s),舵机二连20接口(黄色是信号线s)。超声波部分,四个超声波的T口和E口分别连2 3 4 5 6 7 8 9。蜂鸣器连10口,步进电机ena dir pul+分别连41 42 45的信号线,ena dir pul-分别连41 42 45的接地线。另外,由于耗电较大,DC口可以连12伏的电源。
int servo1Pin = 11;
int servo2Pin = 20;
int servo1Angle = 0;
int servo2Angle = 0;
int trigPin = 2; // 超声波测距模块的触发引脚
int echoPin = 3; // 超声波测距模块的接收引脚
int trigPin1 = 4; // 超声波传感器1的触发引脚
int echoPin1 = 5; // 超声波传感器1的接收引脚
int trigPin2 = 6; // 超声波传感器2的触发引脚
int echoPin2 = 7; // 超声波传感器2的接收引脚
int trigPin3 = 8; // 超声波传感器3的触发引脚
int echoPin3 = 9; // 超声波传感器3的接收引脚
int buzzerPin = 10; // 控制蜂鸣器的引脚
int distance = 100; // 存储测距值的变量
int distance1 = 100; // 存储测距值1的变量
int distance2 = 100; // 存储测距值2的变量
int distance3 = 100; // 存储测距值3的变量
#define ENA_PIN 41 // ENA 引脚
#define DIR_PIN 42 // DIR 引脚
#define PUL_PIN 45 // PUL 引脚
int stepsPerRevolution = 200; // 步进电机每圈的步数
int totalSteps = 27 * stepsPerRevolution; // 总共需要运动的步数3.树莓派和arduino连接,通过arduino数据线连接,usb接口端连树莓派。
4.步进电机的连接,除了arduino连接提到的ena dir pul外,步进电机的vcc和gnd还要通过升压稳压模块与电源连接。
三·.代码和运行
1.树莓派部分,训练的代码和训练好的模型会放在最后面,其中的predictpromax.py没有播放视频和显示垃圾信息功能。而vediotest.py有这个功能但是很卡,我们弄到发车前最后一刻也没解决这个问题。
2.arduino部分,这个的代码(也在最后的链接里,叫sichaoshengbo)比较全面,一共有六个线程,能够符合预期地运转。
3.如果想在别的树莓派或者电脑上运行代码,需要安装所需要的环境和库(这个一两句说不完,我就说些重要的),我的python版本是3.9.13,树莓派上的python也是3.9。树莓派用的是32位系统,64位系统不方便运行摄像头,树莓派上安装torch有一定困难,需要手动去官网找到压缩包(建议去谷歌网找)安装。
四.项目总结和链接
说实话真挺难受的,搞了那么久,学了那么多东西,最后比赛的时候运行不了。一是电池确实有点问题,不知道是电压不够还是没电了;二是比赛那天队员之间闹了小矛盾,可能还是缺乏经验吧,那两天各种难受,好几次快哭出来。不过这个过程还挺好的,一个半月的忙忙碌碌,特别是最后一个礼拜四个人一起熬夜干活的时候(说起来435的泡面真好吃)。还有就是武汉理工发的券真好用,嘎嘎吃。最后感谢我的组员和老师,虽然俺是机械的,但是通过这次比赛学到了好多电信那边的东西,以后想用单片机做一些好玩的东西。差点忘了给链接了,下面是链接:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









