







STM32 Proteus仿真自动红外避障小车前进后退左右转 -0040
Proteus仿真小实验:
STM32 Proteus仿真自动红外避障小车前进后退左右转 -0040
功能:
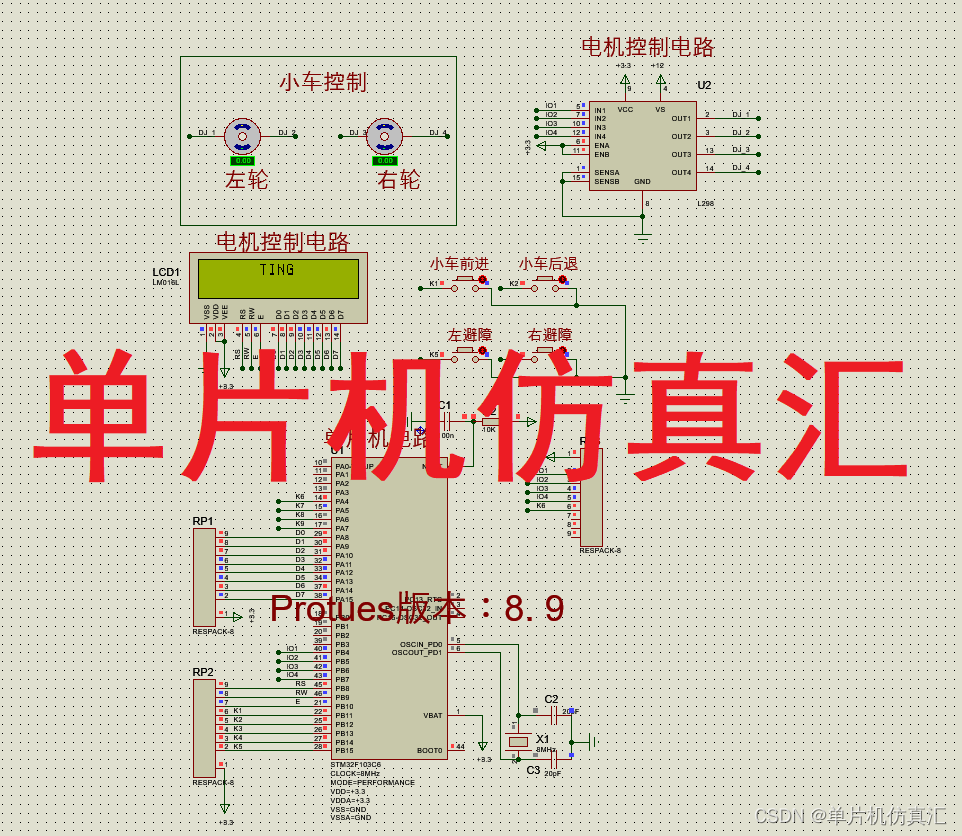
硬件组成:STM32F103C +LCD1602 +L298N电机控制电路+2个电机一个左轮一个右轮 +2个按键(模拟两个避障模块) +2个按键 (1个前进 1个后退)
1.前进或者后退时(前进或者后退键按下),小车前进时通过按键模拟红外避障,避障模块左边检测到右转 右边检测到左转 左右都没有检测到直行。
2.前进时:左右两个电机正转且速度一样。
3.后退时:左右两个电机反转且速度一样。
3.左转时:左电机速度快右电机速度慢,从而实现左转。
4.右转时:右电机速度快左电机速度慢,从而实现右转。
5.电机的速度通过PWM进行控制。
6.LCD1602显示当前的运行状态。
有功能视频哦:
可以哔哩哔哩B站,搜索UP主“单片机仿真汇”。在其空间中搜索关键词“避障小车”即可找到对应详细功能视频和介绍。
电路图:
部分源代码:
void main()
{
//对第1个电机进行PWM控制
i1++;
if(i1<=PWM_Sudu_1)
{
//方向控制
if(xiaochezhuangtai==1 || xiaochezhuangtai==3|| xiaochezhuangtai==4)//1-前进 3-左转 4右转
{
//正转
IO_1_1;
IO_2_0;
}
else if(xiaochezhuangtai==2 )//2-后退
{
//反转
IO_1_0;
IO_2_1;
}
}
}















 9082
9082











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









