







简介:在计算机视觉中
光流的概念:(Opt
它是一种运动模式,这
二维图像的移动相对于
有序的图像可以估计出
光流算法:
它评估了两幅图像的之
Lucas–Kana
这个算法是最常见,最
图像约束方程可以写为 I( x, y, z, t) = I( x + δ x, y + δ y, z + δ z, t + δ t)
I(x, y,z, t) 为在(x,y,z)位
我们假设移动足够的小

光流的概念:(Opt
它是一种运动模式,这
二维图像的移动相对于
有序的图像可以估计出
光流算法:
它评估了两幅图像的之
Lucas–Kana
这个算法是最常见,最
图像约束方程可以写为 I( x, y, z, t) = I( x + δ x, y + δ y, z + δ z, t + δ t)
I(x, y,z, t) 为在(x,y,z)位
我们假设移动足够的小
-
H.O.T. 指更高阶,在移动足够
- I x V x + I y V y + I z V z = − I t。 写做:
-
 这个方程有三个未知量
这个方程有三个未知量
-

-

-

-
 三个未知数但是有多于
三个未知数但是有多于
-
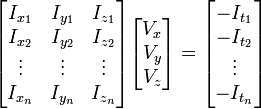 记作:
记作:
-
为了解决这个超定问题
,我们采用最小二乘法 : -
 or
or
-
 得到:
得到:
-
 其中的求和是从1到n
其中的求和是从1到n
-
这也就是说寻找光流可
以通过在四维上图像导 数的分别累加得出。我 们还需要一个权重函数 W(i, j,k), ![i,j,k \in [1,m]](http://upload.wikimedia.org/math/a/c/e/acee99b6db15dea65d0984f2d95429f3.png) 来突出窗口中心点的坐
来突出窗口中心点的坐
标。高斯函数做这项工 作是非常合适的,
这个算法的不足在于它

或者

我们得到:

V x, V y, V z 分别是I(x,y,z
 ,
,
 ,
,
 和
和
 则是图像在(
x,
y,
z,
t)这一点向相应方向的
则是图像在(
x,
y,
z,
t)这一点向相应方向的
所以

补充:opencv里















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









