






一、ROS安装测试
linux上ROS安装_linux ros_菜鸟z级的博客-CSDN博客
见之前的博客
测试结果:

二、QT工具箱下载使用
打开终端,输入:(melodic修改为自己ROS的版本)
sudo apt install ros-melodic-rqt
接着输入:(melodic修改为自己ROS的版本)
sudo apt install ros-melodic-rqt-common-plugins
日志输出工具测试:
启动ros
roscore
1、日志输出工具
rqt_console
2、计算图形可视化工具
rqt_graph
3、数据绘图工具
rqt_plot
三、rosbag-数据记录和回放
1、记录数据
首先启动海龟键盘控制:
roscore
//新开终端
rosrun turtlesim turtlesim_node
//新开终端
rosrun turtlesim turtle_teleop_key
查看主题
rostopic list -v
使用rosbag获取主题消息,并打包放入指定文件夹
mkdir ~/bagfiles
cd ~/bagfiles
rosbag record -a
操纵海龟运动一会,然后 ctrl+c 停止消息记录,查看文件夹有一个bag后缀的文件
ls
2、回放数据
数据记录完后,可以数据回放
rosbag info <your bagfile>
可以看到所有主题、消息类型、消息数量
然后,终止turtle_teleop_key控制节点,重新启动 turtlesim_node
rosrun turtlesim turtlesim_node在回放的终端,输入下面命令:
rosbag play <your bagfile>

结合QT工具回放数据记录,输入:(替换自己的文件)
rqt_bag 2023-09-26-21-01-11.bag

重新打开海龟示例

在工具主题栏中,鼠标右键,选择publish,再点击运行


四、RViz可视化工具
3D可视化平台
1、启动RViz
一个终端启动ROS Master
roscore另一个终端启动RViz
rosrun rviz rviz
2、数据可视化
添加插件:点击左下角的add可以选择需要使用的插件
练习
1 master
roscore
//打开一个新终端
rostopic pub -r 10 /chatter std_msgs/String "data:'hello'"
//再开一个终端
rostopic echo /chatter问1:关闭roscore后,会发生什么?
答1:仍然保持信息的接收

问2:打开新终端并订阅主题,检查运行效果?
答2:无法接收,没有master

2 通信
启动
roscore新开终端,启动乌龟节点
rosrun turtlesim turtlesim_node新开终端,查看节点信息
rosnode list
rosnode info /turtlesim查看主题信息
rostopic -h
rostopic list问1:找到控制乌龟移动的主题,并让乌龟以半径为1的圆运行
答:
启动
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key查看主题信息
rostopic info /turtle1/cmd_vel
先输入:
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:然后按Tab键不齐,接着修改数据,把线速度的X修改为1,角速度的Z也修改为1,修改完后按下回车


问2:使用rosservice调用将画笔的颜色更改为红色,并发布一个运动命令来检查更改效果
答:
rosservice call /turtle1/set_pen "{r: 255, g: 0, b: 0, width: 10, 'off': 0}"
r,g,b控制画笔的颜色值。取值范围为0-255.
with控制的是画笔的粗细。
off表示是否使用画笔,0代表是使用,1为不使用。不使用时看不见行走的路线


问3:使用rosparam set 将背景色改为白色
答:
rosparam set /turtlesim/background_b 255
rosparam set /turtlesim/background_g 255
rosparam set /turtlesim/background_r 255
rosservice call /clear "{}"


3 绘制
问1:绘制边长为3m的正方形和五角星
答:
正常打开乌龟程序,绘制正方形
rosrun turtlesim draw_square
绘制五角星
打开乌龟程序,输入
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[3.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[0.0, 0.0, 0.0]' '[0.0, 0.0, 3.7]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[3.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[0.0, 0.0, 0.0]' '[0.0, 0.0, 3.7]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[3.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[0.0, 0.0, 0.0]' '[0.0, 0.0, 3.7]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[3.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[0.0, 0.0, 0.0]' '[0.0, 0.0, 3.7]'
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[3.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'

问2:用rosbag记录乌龟的运动
答:
按照之前记录数据的方法实现

问3:回放海龟运动,并启动rqt_plot来观察数据
答:
按照之前回放数据的方法实现


4 Gazebo 和RViz
1)将提供的包复制到根目录,编译工作空间并配置环境变量
catkin_make
source devel/setup.bash
2)启动 spark_gazebo.launch
roslaunch spark1_description spark_gazebo.launch
3)选择上面物体,将其放置在spark相机前

4)打开另一个终端,也进入工作空间, 配置环境变量,并打开一个RViz
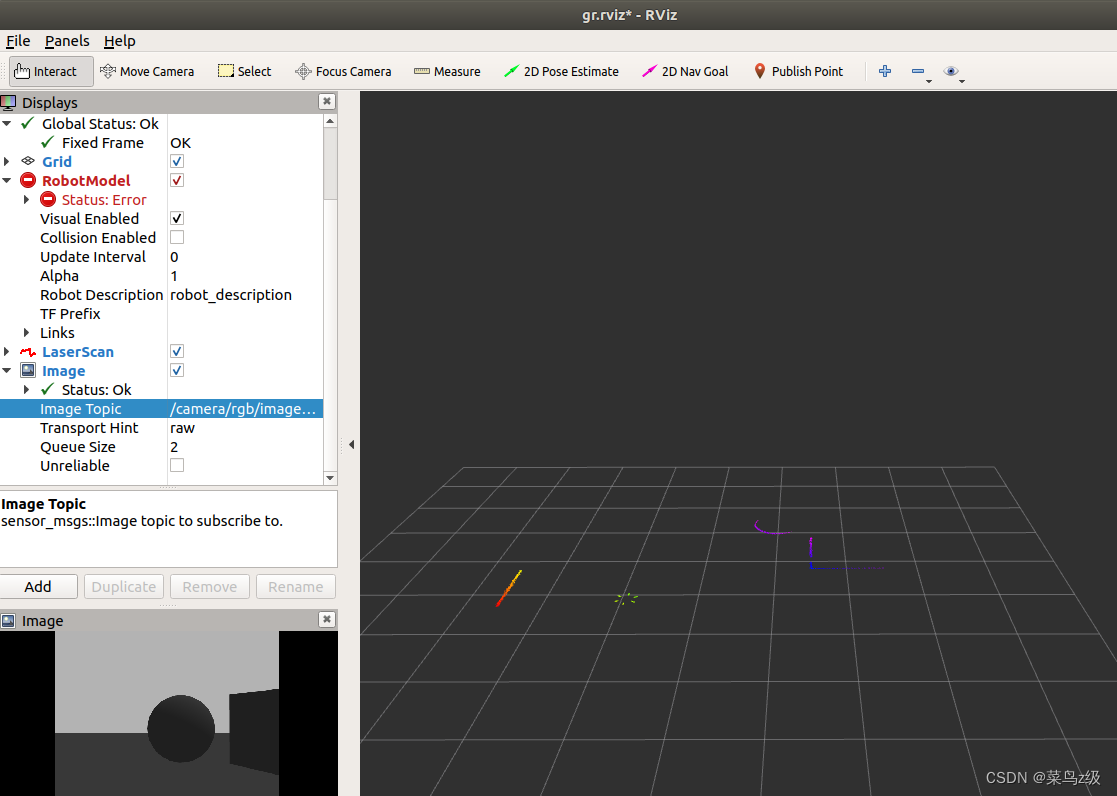
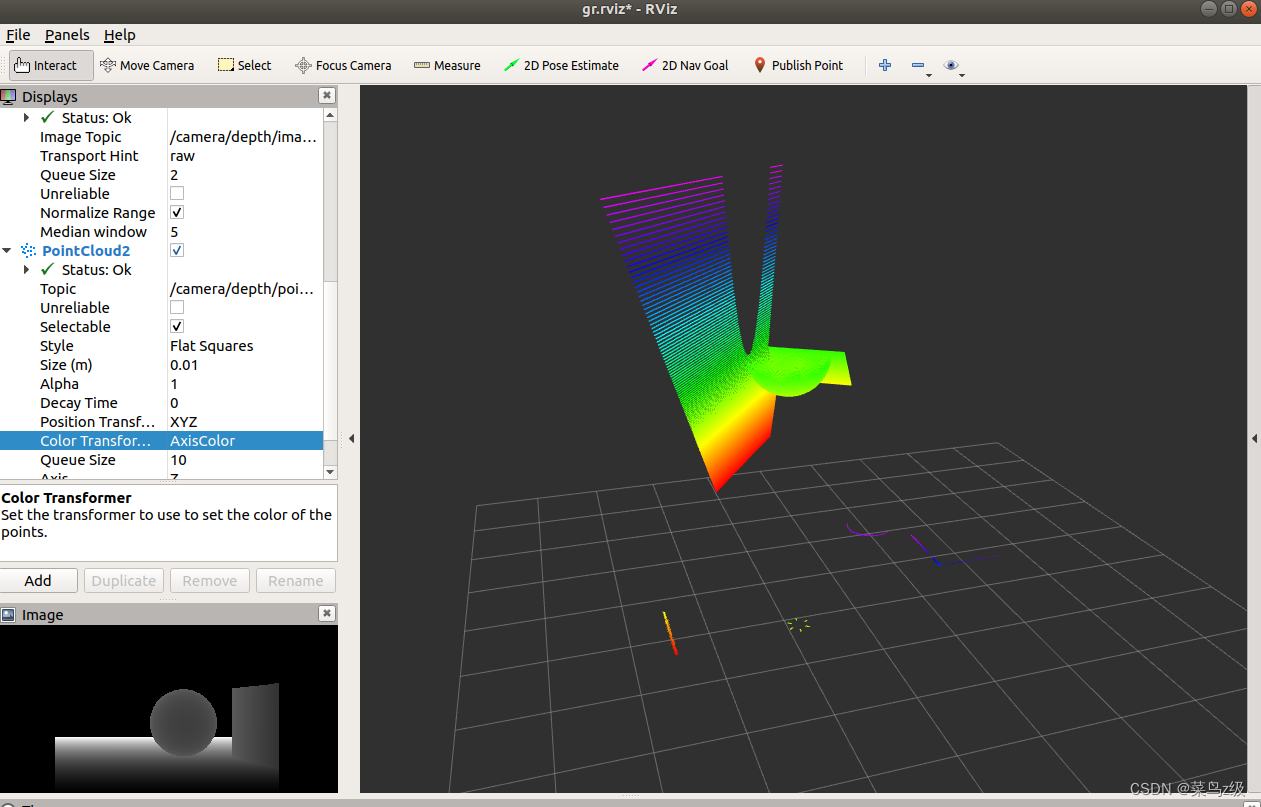
rviz显示激光雷达、摄像头、深度图像、点云、机器人姿态等数据
rgb图:
深度图:

点云图:
保存RViz设置,使用rqt_ graph显示节点关系
















 480
480











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









