







 超级会员免费看
超级会员免费看
 本文介绍了74LS160作为十进制计数器的特性,包括其功能、引脚定义、逻辑符号、逻辑框图和时序图,并通过Multisim14.0展示了仿真过程及效果。
本文介绍了74LS160作为十进制计数器的特性,包括其功能、引脚定义、逻辑符号、逻辑框图和时序图,并通过Multisim14.0展示了仿真过程及效果。
一、简介:
74LS160是常用的数字逻辑芯片,为十进制计数器,具有计数、置数、禁止清零等功能,其内部是由D触发器和逻辑门电路构成的。芯片具有两个使能端ENP和ENT,高电平有效,具有一个清零端MR,低电平有效,在计数时需要接高电平。D0-D3是并行输入,Q0-Q3是输出端,而且具有进位端RCO。
二、引脚定义:
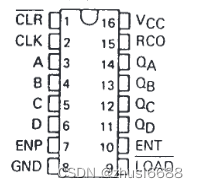
三、逻辑符号:
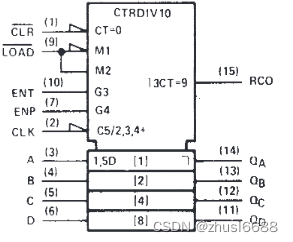
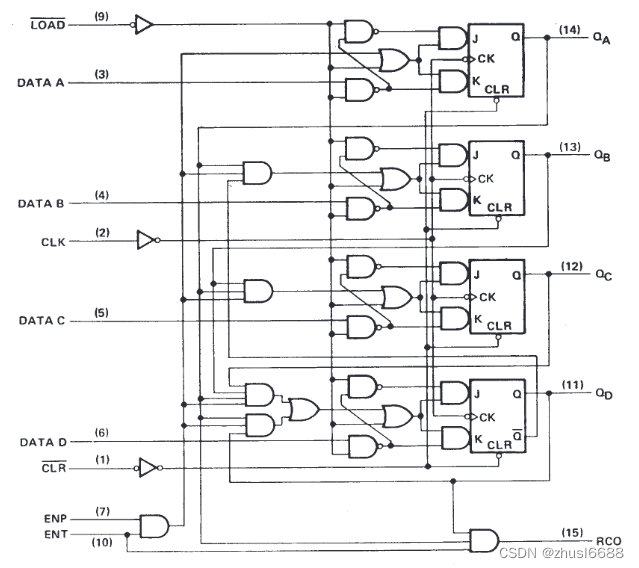
四、逻辑框图:
五、时序图:
一、简介:
74LS160是常用的数字逻辑芯片,为十进制计数器,具有计数、置数、禁止清零等功能,其内部是由D触发器和逻辑门电路构成的。芯片具有两个使能端ENP和ENT,高电平有效,具有一个清零端MR,低电平有效,在计数时需要接高电平。D0-D3是并行输入,Q0-Q3是输出端,而且具有进位端RCO。
二、引脚定义:
三、逻辑符号:
四、逻辑框图:
五、时序图:
 3839
1625
3839
1625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























