







 超级会员免费看
超级会员免费看
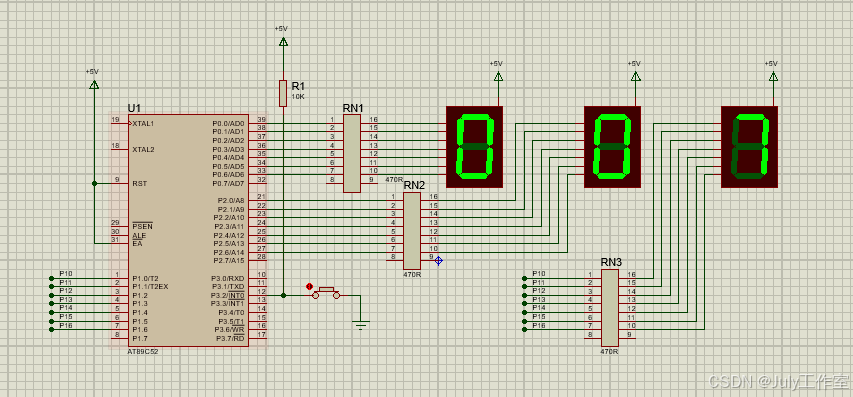
一、仿真原理图:
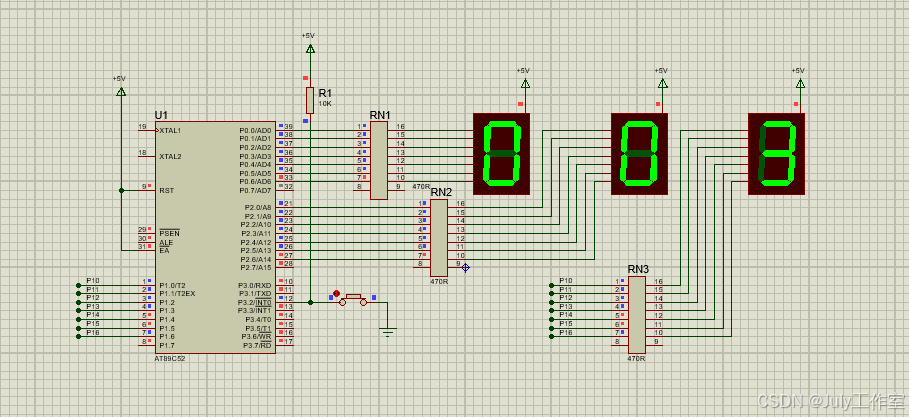
二、仿真效果:
三、部分相关代码:
1、外部中断程序:
void int0(void) interrupt 0 using 0
{
number++;
}
2、主函数:
void main(void)
{
SystemInit();
VariableInit();
while(1)
{
display();
}
}
3、数码显示:
void display(void)
{
P0 = tube[(number % 1000) / 100]; //显示百位
P2 = tube[(number % 100) / 10]; //显示十位
P1 = tube[number % 10]; //显示个位
}


















 1139
1139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











