







介绍
什么是线程?我们必须首先了解线程操作的边界。
当计算机程序从某个存储区加载到计算机内存中并开始执行时,它就变成了一个进程。一个进程可以由一个处理器或一组处理器执行。内存中的进程描述包含重要信息,例如跟踪程序中当前位置的程序计数器(即当前正在执行的指令)、寄存器、变量存储、文件句柄、信号等。
线程是程序中的一系列此类指令,可以独立于其他代码执行。
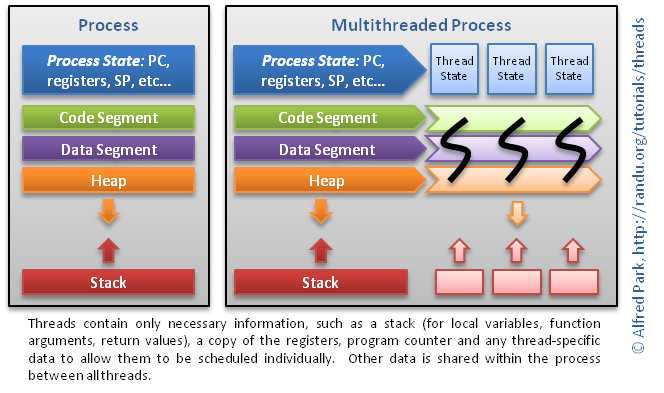
上图概念性地显示了线程位于同一进程地址空间内,因此,进程的内存描述中存在的大部分信息可以跨线程共享。有些信息是无法复制的,例如堆栈(每个线程指向不同内存区域的堆栈指针)、寄存器和线程特定的数据。这一信息足以允许独立于程序的主线程和程序内的一个或多个其他线程来调度线程。
建立和使用线程
线程标识符
程序中使用线程标识符 ID 来表示线程。线程 ID 属于封装的 pthreadLt 类型。 为建立线程,你需要在程序中声明一个 pthread_t 类型的变量。 如果只需在某个函数中使用线程 ID,或者函数直到线程终止时才返回,则可以将线程 ID 声明为自动存储变量,不过大部分时间内, 线程 ID 保存在共享变量中(静态或外部), 或者保存在堆空间的结构体中。
pthread_t thread;
创建线程
通过向 pthread_create 函数传送线程函数地址和线程函数调用的参数来创建线程。线程函数应该只有一个 void * 类型参数,并返回相同的类型值。 当创建线程时,pthread_create 函数返回一个 pthread_t 类型的线程 ID, 并保存在 thread 参数中。 通过这个线程 ID, 程序可以引用该线程。
int pthread_create(pthread_t *thread, const pthreae_attr_t *attr, void *(*start)(void *), void *arg);
获得自己的线程ID
线程可以通过调用 pthread_self 来获得自身的 ID。除非线程的创建者或者线程本身将线程 ID 保存于某处,否则不可能获得一个线程的 ID。要对线程进行任何操作都必须通过线程 ID。
pthread_t pthread_self(void);
比较线程
可以使用 pthread_equal 函数来比较两个线程 ID,只能比较二者是否相同。比较两个线程 ID 谁大谁小是没有任何意义的,因为线程 ID 之间不存在顺序。如果两个线程 ID 表示同一个线程,则 pthread_equal 函数返回非零值,否则返回零值。
int pthread_equal(pthread_t tl, pthread_t t2); // 相等返回非0值
分离线程
如果要创建一个从不需要控制的线程,可以是用属性(attribute)来建立线程以使它可分离的。如果不想等待创建的某个线程,而且知道不再需要控制它,可以使用 pthread_detach 函数来分离它。 分离一个正在运行的线程不会对线程带来任何影响,仅仅是通知系统当该线程结束时,其所属资源可以自动被回收。网络、多线程服务器常用。
int pthread_detach(pthread_t thread);
退出线程
当 C 程序运行时,首先运行 main 函数。在线程代码中, 这个特殊的执行流被称为 “初始线程” 或 “主线程”。 你可以在初始线程中做任何你能在普通线程中做的事情。也可以调用 pthread_exit 来终止自己。
int pthread_exit(void *value_ptr);
取消线程
外部发送终止信号给指定线程,如果成功则返回0,否则返回非0。发送成功并不意味着线程会终止。 另外,如果一个线程被回收,终止线程的 ID 可能被分配给其他新的线程,使用该 ID 调用 pthread_cancel 可能就会取消一个不同的线程, 而不是返回 ESRCH 错误。
int pthread_cancel(pthread_t thread);
等待线程结束
如果需要获取线程的返回值,或者需要获知其何时结束,应该调用 pthread_join 函数。 pthread_join 函数将阻塞其调用者直到指定线程终止。然后,可以选择地保存线程的返回值。调 用 pthread_join 函数将自动分离指定的线程。线程会在返回时被回收,回收将释放所有在线程终止时未释放的系统和进程资源,包栝保存线程返回值的内存空间、堆栈、保存寄存器状态的内存空间等。所以,在线程终止后上述资源就不该被访问了。
int pthread_join(pthread_t thread, void **value_ptr);
线程生命周期
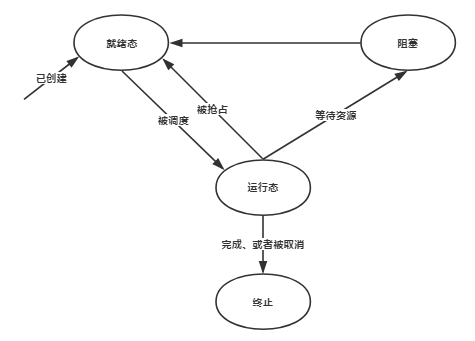
线程有四种基本状态:
- 就绪(Ready)状态。线程能够运行,但在等待可用的处理器,可能刚刚启动,或刚刚从阻塞中恢复,或者被其他线程抢占。
- 运行(Running)状态。线程正在运行,在多处器系统中,可能有多个线程处于运行态线程由于等待处理器外的其他条件无法运行,如条件变量的改变、加锁互斥量或 I/O 操作结束。
- 阻塞(Blocked)状态。线程由于等待处理器外的其他条件无法运行,如条件变量的改变、加锁互斥量或 I/O 操作结束。
- 终止(Terminated)状态。线程从起始函数中返回,或调用 pthread_exit,或者被取消,终止自己并完成所有资源清理。不是被分离,也不是被连接,一且线程被分离或者连接,它就可以被收回。
下面是线程的状态转换图:
下面程序展示了一个线程使用的完整生命周期实例:
/*
*
* threads-example.c: Program to demonstrate Pthreads in C
*/
#include <sys/types.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <errno.h>
#include <pthread.h>
#include <unistd.h>
void *ethread (void *arg);
char ret_status [10] [100];
int main (int argc, char **argv)
{
pthread_t tid [10];
int i, r;
void *status;
char buffer [128];
// Create 10 threads
int thread_no [10];
for (i = 0; i < 10; i++) {
thread_no [i] = i;
if ((r = pthread_create (&tid [i], NULL, ethread, (void *) &thread_no [i])) != 0) {
strerror_r (r, buffer, sizeof (buffer));
fprintf (stderr, "Error = %d (%s)\n", r, buffer); exit (1);
}
}
if ((r = pthread_cancel (tid [9])) != 0) {
strerror_r (r, buffer, sizeof (buffer));
fprintf (stderr, "Error = %d (%s)\n", r, buffer); exit (1);
}
// Wait for threads to terminate
for (i = 0; i < 10; i++) {
if ((r = pthread_join (tid [i], &status)) != 0) {
strerror_r (r, buffer, sizeof (buffer));
fprintf (stderr, "Error = %d (%s)\n", r, buffer); exit (1);
}
if (status == PTHREAD_CANCELED)
printf ("i = %d, status = CANCELED\n", i);
else
printf ("i = %d, status = %s\n", i, (char *) status);
}
exit (0);
}
// ethread: example thread
void *ethread (void *arg)
{
int my_id = *((int *) arg);
// Take a nap
sleep (1);
// say hello and terminate
printf ("Thread %d: Hello World!\n", my_id);
sprintf (ret_status [my_id], "Thread %d: %d", my_id, my_id + 10);
if (my_id == 9) sleep (10);
// pass your id to the thread waiting for you to terminate
// using pthread_join.
pthread_exit (ret_status [my_id]);
}
程序运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./threads-example
Thread 8: Hello World!
Thread 6: Hello World!
Thread 5: Hello World!
Thread 4: Hello World!
Thread 3: Hello World!
Thread 0: Hello World!
Thread 7: Hello World!
Thread 2: Hello World!
Thread 1: Hello World!
i = 0, status = Thread 0: 10
i = 1, status = Thread 1: 11
i = 2, status = Thread 2: 12
i = 3, status = Thread 3: 13
i = 4, status = Thread 4: 14
i = 5, status = Thread 5: 15
i = 6, status = Thread 6: 16
i = 7, status = Thread 7: 17
i = 8, status = Thread 8: 18
i = 9, status = CANCELED
上面程序中 pthread_create 创建线程后,线程处于就绪状态。受调度机制的限制,新线程可能在就绪状态下停留一段时间才被执行。 当处理器选中一个就绪线程执行它时,该线程进入运行态。通常这意味着某个其他线程被阻塞或者被时间片机制抢占,处理器会保存被阻塞(或抢占)线程的环境并恢复下二个就绪线程的环境。 主线程在调用 pthread_join 进入阻塞状态,等待它创建的线程运行结束。 当调用 pthread_exit 退出线程或调用 pthread_cancel 取消线程时, 线程在调用完清理过程后也将进入终止态。而主线程等到创建的线程终止后重新运行直到结束。
pthread_detach与pthread_join用法与差异
- pthread有两种状态joinable状态和unjoinable状态,如果线程是joinable状态,当线程函数自己返回退出时或pthread_exit时都不会释放线程所占用堆栈和线程描述符(总计8K多)。只有当你调用了pthread_join之后这些资源才会被释放。若是unjoinable状态的线程,这些资源在线程函数退出时或pthread_exit时自动会被释放。
- unjoinable属性可以在pthread_create时指定,或在线程创建后在线程中pthread_detach自己, 如:pthread_detach(pthread_self()),将状态改为unjoinable状态,确保资源的释放。或者将线程置为 joinable,然后适时调用pthread_join.
- 其实简单的说就是在线程函数头加上 pthread_detach(pthread_self())的话,线程状态改变,在函数尾部直接 pthread_exit线程就会自动退出。省去了给线程擦屁股的麻烦。
pthread_join实例
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
#include <stdio.h>
void *thread_function(void *arg)
{
int i;
for ( i=0; i<8; i++)
{
printf("Thread working...! %d \n",i);
sleep(1);
}
return NULL;
}
int main(void)
{
pthread_t mythread;
if ( pthread_create( &mythread, NULL, thread_function, NULL) )
{
printf("error creating thread.");
abort();
}
if ( pthread_join ( mythread, NULL ) )
{
printf("error join thread.");
abort();
}
printf("thread done! \n");
exit(0);
}
运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./thread_join
Thread working...! 0
Thread working...! 1
Thread working...! 2
Thread working...! 3
Thread working...! 4
Thread working...! 5
Thread working...! 6
Thread working...! 7
thread done!
去掉pthread_join ( mythread, NULL )后再看运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./thread_join
thread done!
pthread_detach实例
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <pthread.h>
void *tfn(void *arg)
{
pthread_t tid=pthread_self();
int n = 3;
//pthread_detach(pthread_self());
while (n--) {
printf("thread pid %lx count %d\n", tid,n);
sleep(1);
}
pthread_exit((void *)1);
}
int main(void)
{
pthread_t tid;
void *tret;
int err;
#if 0
pthread_attr_t attr; /*通过线程属性来设置游离态(分离态)*/
pthread_attr_init(&attr);
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
pthread_create(&tid, &attr, tfn, NULL);
#else
pthread_create(&tid, NULL, tfn, NULL);
printf("child thread pid %lx\n",tid);
pthread_detach(tid); //让线程分离 ----自动退出,无系统残留资源
#endif
while (1) {
err = pthread_join(tid, &tret);
printf("-------------err= %d\n", err);
if (err != 0)
fprintf(stderr, "thread_join error: %s\n", strerror(err));
else
fprintf(stderr, "thread exit code %d\n", (int)tret);
sleep(1);
}
return 0;
}
运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./thread_detach
child thread pid 7f3f85671700
-------------err= 22
thread_join error: Invalid argument
thread pid 7f3f85671700 count 2
thread pid 7f3f85671700 count 1
-------------err= 22
thread_join error: Invalid argument
-------------err= 22
thread_join error: Invalid argument
thread pid 7f3f85671700 count 0
-------------err= 22
thread_join error: Invalid argument
-------------err= 22
thread_join error: Invalid argument
-------------err= 22
thread_join error: Invalid argument
-------------err= 22
分析:
- 使用pthread_detach函数实现线程分离时,应当先创建线程(pthread_create),然后再用pthread_detach实现该线程的分离。因此,这种方式与修改线程属性来实现线程分离的方法相比,不会发生在线程创建函数还未来得及返回时子线程提前结束导致返回的线程号是错误的线程号的情况。因为采用这种方法,即使子线程提前结束(先于pthread_create返回),但是子线程还未处于分离状态,因此其PCB的残留信息依然存在,如线程号等一些系统资源,所以线程号等系统资源仍被占据,还未分配出去,所以创建函数返回的线程号依然是该线程的线程号;
- 不能对一个已经处于detach状态的线程调用pthread_join进行回收,会出现错误,且错误编号为22;
- 还可采用修改线程属性的方法来实现线程分离。
线程属性设置
线程属性
线程具有属性,用pthread_attr_t表示,在对该结构进行处理之前必须进行初始化,在使用后需要对其去除初始化。 调用pthread_attr_init之后,pthread_t结构所包含的内容就是操作系统实现支持的线程所有属性的默认值。 如果要去除对pthread_attr_t结构的初始化,可以调用pthread_attr_destroy函数。如果pthread_attr_init实现时为属性对象分配了动态内存空间,pthread_attr_destroy还会用无效的值初始化属性对象,因此如果经pthread_attr_destroy去除初始化之后的pthread_attr_t结构被pthread_create函数调用,将会导致其返回错误。
typedef struct
{
int detachstate; // 线程的分离状态
int schedpolicy; // 线程调度策略
structsched_param schedparam; // 线程的调度参数
int inheritsched; // 线程的继承性
int scope; // 线程的作用域
size_t guardsize; // 线程栈末尾的警戒缓冲区大小
int stackaddr_set; // 线程的栈设置
void* stackaddr; // 线程栈的位置
size_t stacksize; // 线程栈的大小
} pthread_attr_t;
Posix线程中的线程属性pthread_attr_t主要包括分离属性、调度策略属性、调度策略优先级设置、继承属性、堆栈地址、scope属性、堆栈大小。在pthread_create中,把第二个参数设置为NULL的话,将采用默认的属性配置。
- 分离属性:detachstate,如果设置为PTHREAD_CREATE_DETACHED 则新线程不能用pthread_join()来同步,且在退出时自行释放所占用的资源。缺省为PTHREAD_CREATE_JOINABLE状态。这个属性也可以在线程创建并运行以后用pthread_detach()来设置,而一旦设置为PTHREAD_CREATE_DETACH状态(不论是创建时设置还是运行时设置)则不能再恢复到PTHREAD_CREATE_JOINABLE状态。使用pthread_attr_setdetachstate()设置
- 调度属性:schedpolicy,表示新线程的调度策略,主要包括SCHED_OTHER(正常、非实时)、SCHED_RR(实时、轮转法)和SCHED_FIFO(实时、先入先出)三种,缺省为SCHED_OTHER,后两种调度策略仅对超级用户有效。运行时可以用过pthread_attr_setschedpolicy ()来改变。
- 调度策略优先级设置:schedparam,一个struct sched_param结构,目前仅有一个sched_priority整型变量表示线程的优先级。这个参数仅当调度策略为实时(即SCHED_RR或SCHED_FIFO)时才有效,并可以在运行时通过pthread_setschedparam()函数来改变,缺省为0。
- 继承属性:inheritsched,有两种值可供选择:PTHREAD_EXPLICIT_SCHED和PTHREAD_INHERIT_SCHED,前者表示新线程使用显式指定调度策略和调度参数(即attr中的值),而后者表示继承调用者线程的值。通过pthread_attr_setinheritsched()设置,缺省为PTHREAD_EXPLICIT_SCHED
- scope属性:scope,表示线程间竞争CPU的范围,也就是说线程优先级的有效范围。POSIX的标准中定义了两个值:PTHREAD_SCOPE_SYSTEM和PTHREAD_SCOPE_PROCESS,前者表示与系统中所有线程一起竞争CPU时间,后者表示仅与同进程中的线程竞争CPU。通过pthread_attr_setscope()设置
设置线程属性流程如下:
pthread_attr_t attr;
pthread_attr_init(&attr); //线程属性初始化配置系统默认线程属性
... /* set up the pthread_attr_t structure */ //设置将要设置的线程属性
pthread_create (&tid, &attr, &func, &arg);
设置线程属性函数如下:
//– initializing, destroying
int pthread_attr_init(pthread_attr_t *attr);
int pthread_attr_destroy(pthread_attr_t *attr);
//– setting it up
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate);
int pthread_attr_setguardsize(pthread_attr_t *attr, size_t guardsize);
int pthread_attr_setinheritsched(pthread_attr_t *attr, int inheritsched);
int pthread_attr_setschedparam(pthread_attr_t *attr, const struct sched_param *param);
int pthread_attr_setschedpolicy(pthread_attr_t *attr, int policy);
int pthread_attr_setscope(pthread_attr_t *attr, int contentionscope);
int pthread_attr_setstackaddr(pthread_attr_t *attr, void *stackaddr);
int pthread_attr_setstacksize(pthread_attr_t *attr, size_t stacksize);
设置线程调度算法和优先级流程如下:
//– setting both:
struct sched_param param;
pthread_attr_setinheritsched (&attr, PTHREAD_EXPLICIT_SCHED);
param.sched_priority = 15;
pthread_attr_setschedparam (&attr, ¶m);
pthread_attr_setschedpolicy (&attr, SCHED_RR);
pthread_create (NULL, &attr, func, arg);
//– setting priority only:
struct sched_param param;
pthread_attr_setinheritsched (&attr, PTHREAD_EXPLICIT_SCHED);
param.sched_priority = 15;
pthread_attr_setschedparam (&attr, ¶m);
pthread_attr_setschedpolicy (&attr, SCHED_NOCHANGE);
pthread_create (NULL, &attr, func, arg);
涉及线程的继承、调度、参数实例如下:
#include <stdio.h>
#include <string.h>
#include <pthread.h>
#include <sched.h>
void *child_thread(void *arg)
{
int policy = 0;
int max_priority = 0,min_priority = 0;
struct sched_param param;
pthread_attr_t attr;
pthread_attr_init(&attr);
pthread_attr_setinheritsched(&attr,PTHREAD_EXPLICIT_SCHED);
pthread_attr_getinheritsched(&attr,&policy);
if(policy == PTHREAD_EXPLICIT_SCHED){
printf("Inheritsched:PTHREAD_EXPLICIT_SCHED\n");
}
if(policy == PTHREAD_INHERIT_SCHED){
printf("Inheritsched:PTHREAD_INHERIT_SCHED\n");
}
pthread_attr_setschedpolicy(&attr,SCHED_RR);
pthread_attr_getschedpolicy(&attr,&policy);
if(policy == SCHED_FIFO){
printf("Schedpolicy:SCHED_FIFO\n");
}
if(policy == SCHED_RR){
printf("Schedpolicy:SCHED_RR\n");
}
if(policy == SCHED_OTHER){
printf("Schedpolicy:SCHED_OTHER\n");
}
max_priority = sched_get_priority_max(policy);
min_priority = sched_get_priority_min(policy);
printf("Maxpriority:%u\n",max_priority);
printf("Minpriority:%u\n",min_priority);
param.sched_priority = max_priority;
pthread_attr_setschedparam(&attr,¶m);
printf("sched_priority:%u\n",param.sched_priority);
pthread_attr_destroy(&attr);
}
int main(int argc,char *argv[ ])
{
pthread_t child_thread_id;
pthread_create(&child_thread_id,NULL,child_thread,NULL);
pthread_join(child_thread_id,NULL);
return 0;
}
运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./thread_attr_shced
Inheritsched:PTHREAD_EXPLICIT_SCHED
Schedpolicy:SCHED_RR
Maxpriority:99
Minpriority:1
sched_priority:99
配置线程栈流程如下:
// – to set the maximum size:
pthread_attr_setstacksize (&attr, size);
// – to provide your own buffer for the stack:
pthread_attr_setstackaddr (&attr, addr);
// Thread stack allocation can be automatic:
size = 0; // default size
addr = NULL; // OS allocates
// partly automatic:
size = desired_size;
addr = NULL; // OS allocates
// or totally manual:
size = sizeof (*stack_ptr);
addr = stack_ptr;
// Your stack size should be the sum of:
PTHREAD_STACK_MIN + platform_required_amount_for_code;
线程栈配置实例如下:
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <time.h>
#include <sys/time.h>
#include <pthread.h>
#include <unistd.h>
#include <errno.h>
#include <sys/prctl.h>
#define DBG_PRINT(fmt, args...) {printf("%s ", __FUNCTION__);printf(fmt,##args);}
#define BUFFER_LEN 0x3000
void *testThead1(void* arg)
{
//设定线程名为zoobiTask1
prctl(PR_SET_NAME, "zoobiTask1");
char buffer[BUFFER_LEN];
DBG_PRINT("Start\n");
sleep(3);
DBG_PRINT("End\n");
exit(0);
}
#define THREAD_STACK_LEN 0x4000
int main(int argc, const char* argv[])
{
pthread_t thread1ID;
pthread_attr_t attr;
int ret = 0;
void *stackAddr = NULL;
//获取linux的页大小
int paseSize = getpagesize();
DBG_PRINT("The linux page size:0x%x\n", paseSize);
pthread_attr_init(&attr);
/**
* 申请内存,并且内存以页大小对齐,需要申请的内存大小必须是2的整数次幂;
* 经常用的malloc申请的内存只会默认使用8bytes或者16bytes对齐(依赖平台是32位还是64位);
*/
ret = posix_memalign(&stackAddr, paseSize, THREAD_STACK_LEN);
if(0 != ret)
{
DBG_PRINT("posix_memalign failed, errno:%s\n", strerror(ret));
return -1;
}
#if 1
/**
* 设定线程运行栈地址和大小,栈大小最小为16KB,并且栈地址以页面对齐;
*/
ret = pthread_attr_setstack(&attr, stackAddr, THREAD_STACK_LEN);
if(0 != ret)
{
DBG_PRINT("pthread_attr_setstack failed, errno:%s\n", strerror(ret));
return -1;
}
#endif
void *getstackaddr = NULL;
size_t getstackSize = 0;
pthread_attr_getstack(&attr, &getstackaddr, &getstackSize);
DBG_PRINT("getstackaddr:%p, getstackSize:0x%x\n", getstackaddr, getstackSize);
ret = pthread_create(&thread1ID, &attr, testThead1, NULL);
if(ret != 0)
{
DBG_PRINT("pthread_create failed! errno:%s\n", strerror(ret));
return -1;
}
pthread_detach(thread1ID);
sleep(5);
printf("thread done! \n");
return 0;
}
运行结果如下:
bspserver@ubuntu:~/workspace/bin$ ./pthread_stack
main The linux page size:0x1000
main getstackaddr:0x560499a25000, getstackSize:0x4000
testThead1 Start
testThead1 End
如果将BUFFER_LEN更改为0x4000,如下打印:
bspserver@ubuntu:~/workspace/bin$ ./pthread_stack
main The linux page size:0x1000
main getstackaddr:0x55c4d2e40000, getstackSize:0x4000
Segmentation fault (core dumped)
局部变量过大导致栈已经溢出出现Segmentation fault (core dumped)错误。
参考文献:
linux中pthread_join()与pthread_detach()详解
设定线程运行栈:pthread_attr_setstack()















 592
592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









