







simplAR: Augmented reality for OpenCV beginners
Here is a simple AR demo for beginners (-includes me). The program augments only in 2D with a picture or a clip.The video plays rather slow, it would be great if you could use multiple threads (-which i have no clue what so ever!).
*Update - Download links fixed!
Download the Project folder and the source code [6.62 Mb].
Links:
http://www.bigbuckbunny.org/
If you want to download only the (modified) video used in this demo, try the link below-
BigBuckBunny_Trailer [6.43 Mb]
640x480, Xvid/LameMP3
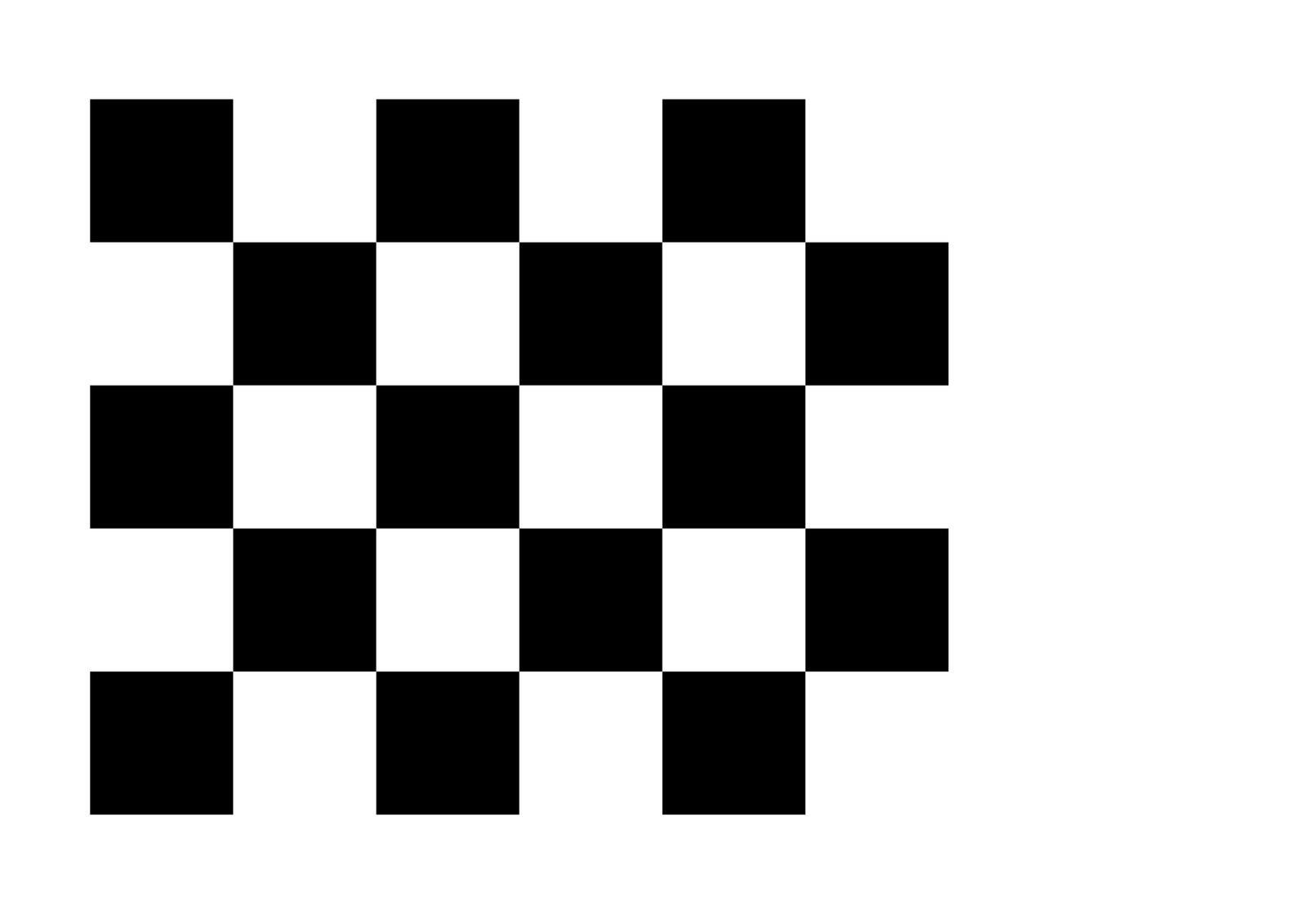
Pattern (Size A4,JPEG):
Videos:
http://www.youtube.com/watch?v=rakZ3b0P5rU&feature=player_embedded
Source Code:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
|
//______________________________________________________________________________________
// OpenCV Simple Augmented Reality Program
// Author: Bharath Prabhuswamy
//______________________________________________________________________________________
//______________________________________________________________________________________
#include <stdio.h>
#include <stdlib.h>
#include "cv.h"
#include "highgui.h"
int
main()
{
CvCapture *capture = 0;
IplImage *image = 0;
IplImage *frame = 0;
IplImage *disp,*neg_img,*cpy_img;
int
key = 0;
int
fcount = 0;
int
option = 0;
capture = cvCaptureFromCAM( 0 );
if
( !capture )
return
-1;
//Use a video with aspect ratio 4:3
CvCapture* vid = cvCreateFileCapture(
"trailer.avi"
);
if
( !vid )
return
-1;
IplImage *pic = cvLoadImage(
"pic.jpg"
);
cvFlip(pic,pic,1);
int
b_width = 5;
int
b_height = 4;
int
b_squares = 20;
CvSize b_size = cvSize( b_width, b_height );
//The pattern actually has 6 x 5 squares, but has 5 x 4 = 20 'ENCLOSED' corners
CvMat* warp_matrix = cvCreateMat(3,3,CV_32FC1);
CvPoint2D32f* corners =
new
CvPoint2D32f[ b_squares ];
int
corner_count;
printf
(
"Select an option to run the program\n\n"
);
printf
(
"1. Show an Image over the pattern.\n"
);
printf
(
"2. Play a Clip over the pattern.\n"
);
printf
(
"3. Mark the pattern.\n\n"
);
scanf
(
"%d"
,&option);
//Quit on invalid entry
if
(!(option>=1 && option<=3))
{
printf
(
"Invalid selection."
);
return
-1;
}
cvNamedWindow(
"Video"
,CV_WINDOW_AUTOSIZE);
while
(key!=
'q'
)
{
image = cvQueryFrame( capture );
if
( !image )
break
;
cvFlip(image,image,1);
disp = cvCreateImage( cvGetSize(image), 8, 3 );
cpy_img = cvCreateImage( cvGetSize(image), 8, 3 );
neg_img = cvCreateImage( cvGetSize(image), 8, 3 );
IplImage* gray = cvCreateImage( cvGetSize(image), image->depth, 1);
int
found = cvFindChessboardCorners(image, b_size, corners, &corner_count,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
cvCvtColor(image, gray, CV_BGR2GRAY);
//This function identifies the pattern from the gray image, saves the valid group of corners
cvFindCornerSubPix(gray, corners, corner_count, cvSize(11,11),cvSize(-1,-1),
cvTermCriteria(CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));
if
( corner_count == b_squares )
{
if
(option == 1)
{
CvPoint2D32f p[4];
CvPoint2D32f q[4];
IplImage* blank = cvCreateImage( cvGetSize(pic), 8, 3);
cvZero(blank);
cvNot(blank,blank);
//Set of source points to calculate Perspective matrix
q[0].x= (
float
) pic->width * 0;
q[0].y= (
float
) pic->height * 0;
q[1].x= (
float
) pic->width;
q[1].y= (
float
) pic->height * 0;
q[2].x= (
float
) pic->width;
q[2].y= (
float
) pic->height;
q[3].x= (
float
) pic->width * 0;
q[3].y= (
float
) pic->height;
//Set of destination points to calculate Perspective matrix
p[0].x= corners[0].x;
p[0].y= corners[0].y;
p[1].x= corners[4].x;
p[1].y= corners[4].y;
p[2].x= corners[19].x;
p[2].y= corners[19].y;
p[3].x= corners[15].x;
p[3].y= corners[15].y;
//Calculate Perspective matrix
cvGetPerspectiveTransform(q,p,warp_matrix);
//Boolean juggle to obtain 2D-Augmentation
cvZero(neg_img);
cvZero(cpy_img);
cvWarpPerspective( pic, neg_img, warp_matrix);
cvWarpPerspective( blank, cpy_img, warp_matrix);
cvNot(cpy_img,cpy_img);
cvAnd(cpy_img,image,cpy_img);
cvOr(cpy_img,neg_img,image);
cvShowImage(
"Video"
, image);
}
else
if
(option == 2)
{
CvPoint2D32f p[4];
CvPoint2D32f q[4];
frame = cvQueryFrame(vid);
if
(!frame)
printf
(
"error frame"
);
IplImage* blank = cvCreateImage( cvGetSize(frame), 8, 3);
cvZero(blank);
cvNot(blank,blank);
q[0].x= (
float
) frame->width * 0;
q[0].y= (
float
) frame->height * 0;
q[1].x= (
float
) frame->width;
q[1].y= (
float
) frame->height * 0;
q[2].x= (
float
) frame->width;
q[2].y= (
float
) frame->height;
q[3].x= (
float
) frame->width * 0;
q[3].y= (
float
) frame->height;
p[0].x= corners[0].x;
p[0].y= corners[0].y;
p[1].x= corners[4].x;
p[1].y= corners[4].y;
p[2].x= corners[19].x;
p[2].y= corners[19].y;
p[3].x= corners[15].x;
p[3].y= corners[15].y;
cvGetPerspectiveTransform(q,p,warp_matrix);
//Boolean juggle to obtain 2D-Augmentation
cvZero(neg_img);
cvZero(cpy_img);
cvWarpPerspective( frame, neg_img, warp_matrix);
cvWarpPerspective( blank, cpy_img, warp_matrix);
cvNot(cpy_img,cpy_img);
cvAnd(cpy_img,image,cpy_img);
cvOr(cpy_img,neg_img,image);
cvShowImage(
"Video"
, image);
}
else
{
CvPoint p[4];
p[0].x=(
int
)corners[0].x;
p[0].y=(
int
)corners[0].y;
p[1].x=(
int
)corners[4].x;
p[1].y=(
int
)corners[4].y;
p[2].x=(
int
)corners[19].x;
p[2].y=(
int
)corners[19].y;
p[3].x=(
int
)corners[15].x;
p[3].y=(
int
)corners[15].y;
cvLine( image, p[0], p[1], CV_RGB(255,0,0),2);
cvLine( image, p[1], p[2], CV_RGB(0,255,0),2);
cvLine( image, p[2], p[3], CV_RGB(0,0,255),2);
cvLine( image, p[3], p[0], CV_RGB(255,255,0),2);
//or simply
//cvDrawChessboardCorners(image, b_size, corners, corner_count, found);
cvShowImage(
"Video"
, image);
}
}
else
{
//Show gray image when pattern is not detected
cvFlip(gray,gray);
cvShowImage(
"Video"
, gray );
}
key = cvWaitKey(1);
}
cvDestroyWindow(
"Video"
);
cvReleaseCapture( &vid );
cvReleaseMat(&warp_matrix);
cvReleaseCapture( &capture );
return
0;
}
|
转载自:http://dsynflo.blogspot.com/2010/06/simplar-augmented-reality-for-opencv.html

















 4421
4421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









