




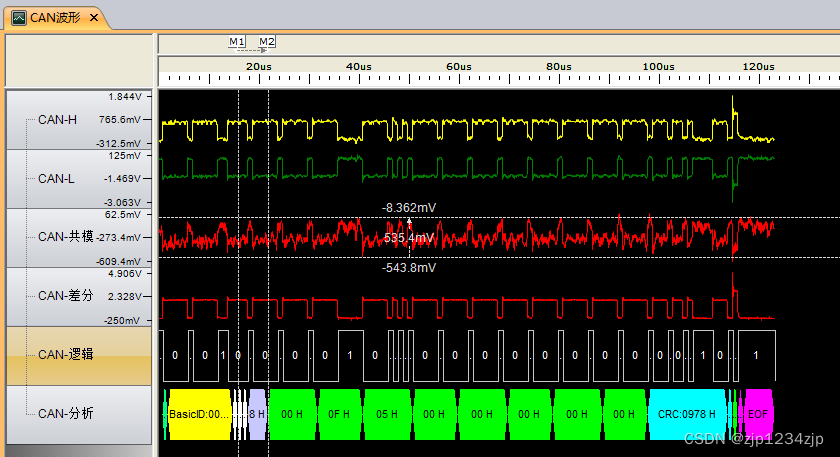
关于CAN的介绍有很多,但是实际看到测量的波形并不多,这个是使用CAN分析仪 CANScope 得到的其中一帧数据的波形。
相关的CAN介绍可以看其他文章进行学习。
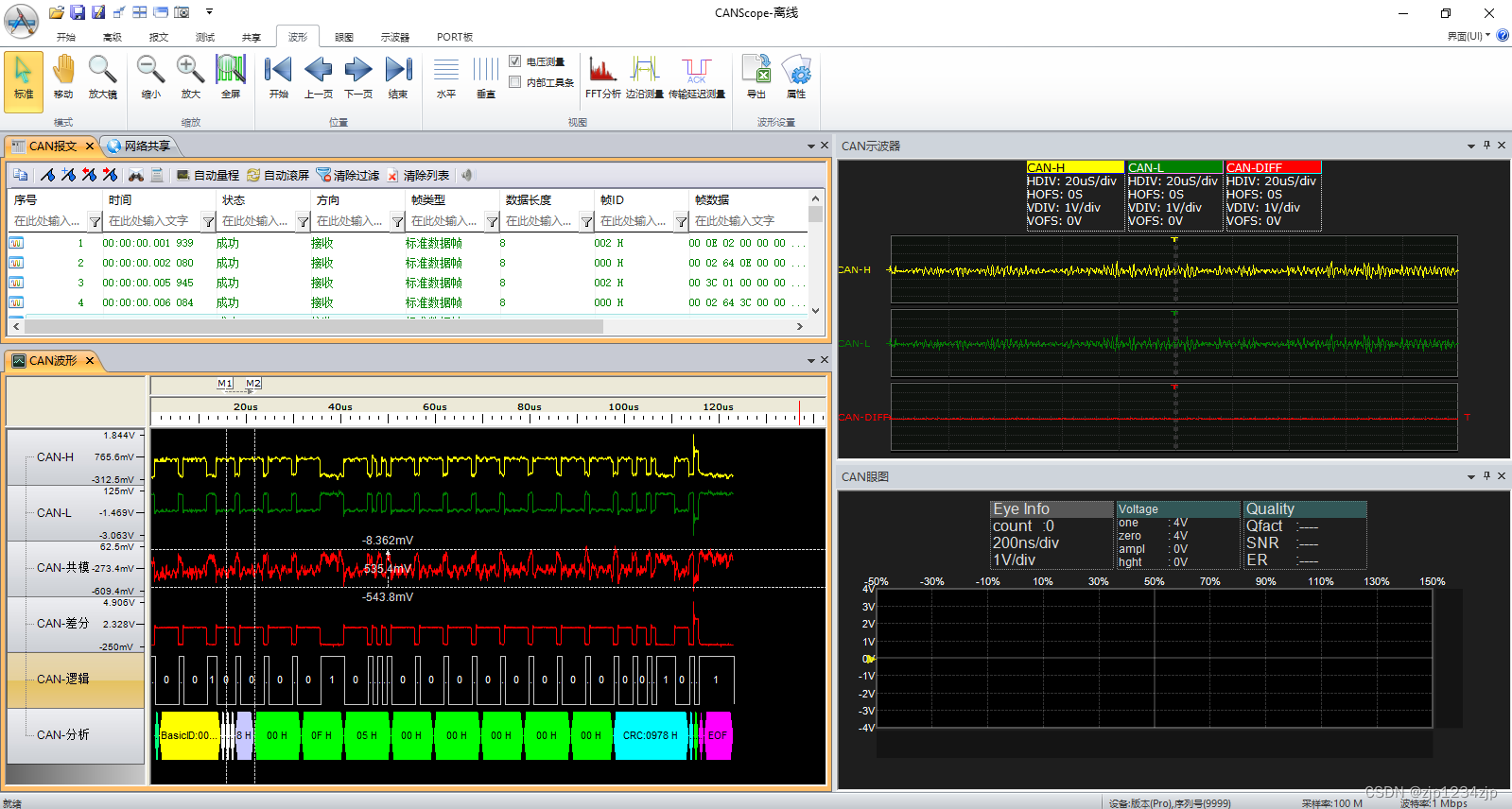
 本文通过CAN分析仪展示了实际测量的CAN数据波形,深入浅出地介绍了CAN技术,并引导读者理解CAN通信的工作原理。
本文通过CAN分析仪展示了实际测量的CAN数据波形,深入浅出地介绍了CAN技术,并引导读者理解CAN通信的工作原理。
关于CAN的介绍有很多,但是实际看到测量的波形并不多,这个是使用CAN分析仪 CANScope 得到的其中一帧数据的波形。
相关的CAN介绍可以看其他文章进行学习。
 2724
2724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























