







声明:此博客是我的学习笔记,所看课程是江协科技的CAN总线课程,知识点都大同小异,我仅进行总结并加上了我自己的理解,所引案例也都是课程中的案例,希望对你的理解有所帮助!
知识点1【CAN总线的概述】
CAN总线(Controller Area Network Bus)控制器局域网总线
1、特点
-
两根通信线(CAN_H CAN_L),线路少,无需共地
-
差分信号通信,抗干扰能力强
-
异步,无需时钟线,通信速率有收发双方决定
-
半双工
-
可挂载多设备,多设备同时发送需要经过仲裁判断先后顺序
多个主控互相通信,设备间没有主从之分,所有设备平等
-
11/29位报文ID,用于区分消息功能,同时决定优先级(29位为拓展格式)
-
可配置1-8Byte的有效载荷(长度可以配置)
-
可实现广播式和请求时两种传输方式
广播式:发送方把数据发送给全部收方,谁要谁就拿走(最常用)
请求式:发送方不主动发送数据,仅在接收方发出请求的时候,才会发出数据
-
应答,CRC校验,位填充,位同步,错误处理等特征
2、主流通信协议对比

知识点2【CAN总线的硬件电路分析】
每个设备通过CAN收发器挂载在CAN总线网络上
CAN收发器主要实现:电平转换,输出驱动和输入采样几个功能
相接方式:CAN控制器有TX和RX两个引脚,直接与CAN收发器的RX,TX相连,无需交叉。CAN收发器的CAN_H,CAN_L直接与CAN总线的对应引脚直接相连
共有两种硬件电路网络,如下
1、高速CAN电路网络(闭环电路)
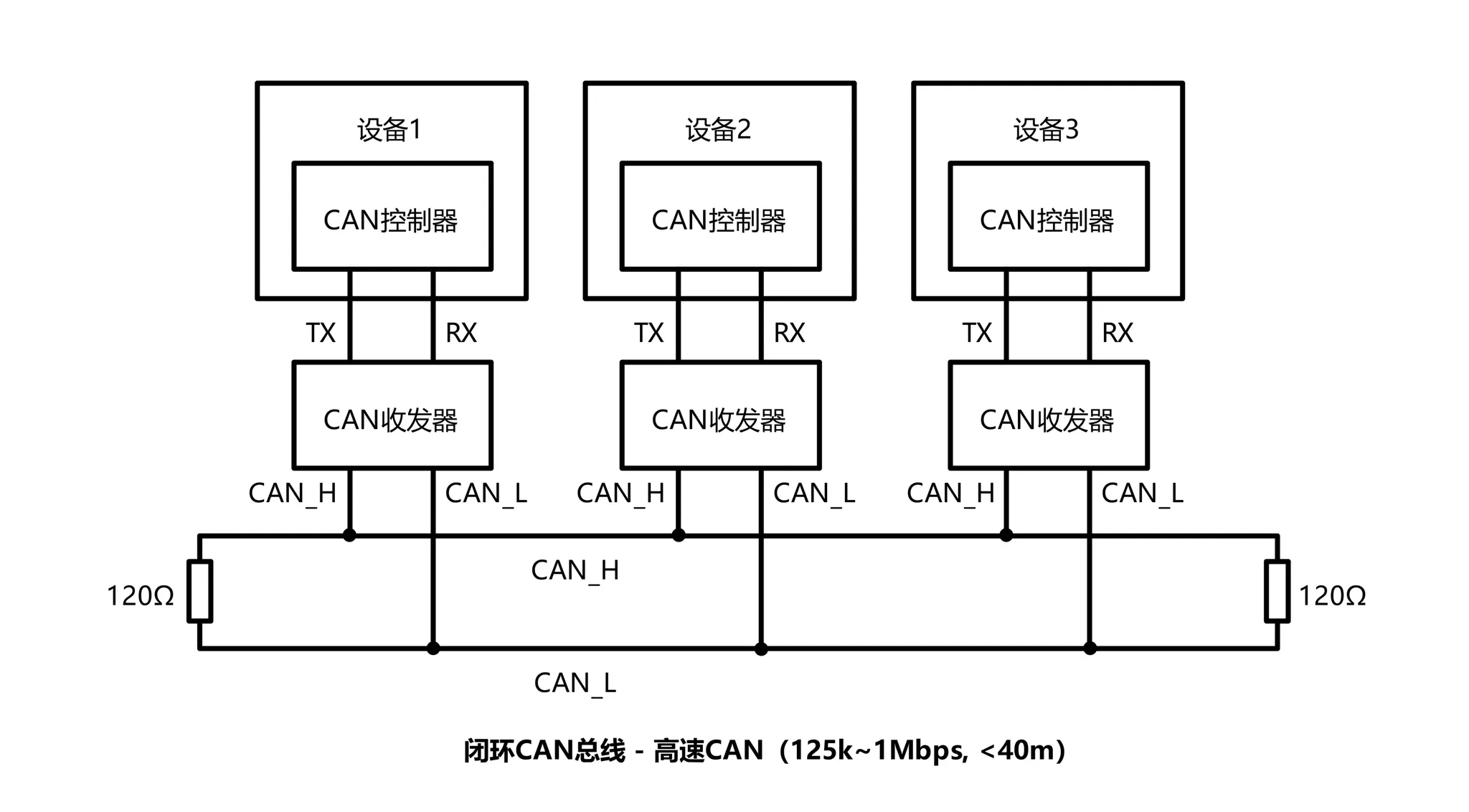
电阻的作用
防止回波反射,回波反射的影响:当电平跳变时会在电平边缘,有一个震荡的波形,影响传输数据的稳定性
没有设备操作时,当没有设备操作总线的时候,会将两总线电压“收紧”(讲两线的电压拉至同一水平:对应“1”电平),电阻小,收紧速率快,但是功耗也就会变高。
注意:当设备想要发送1的时候就表示设备不操作总线,发送0则代表设备操作总线,这也是设备发送0和1的方式
我们主要学习高速CAN总线
2、低速CAN电路网络(开环电路)
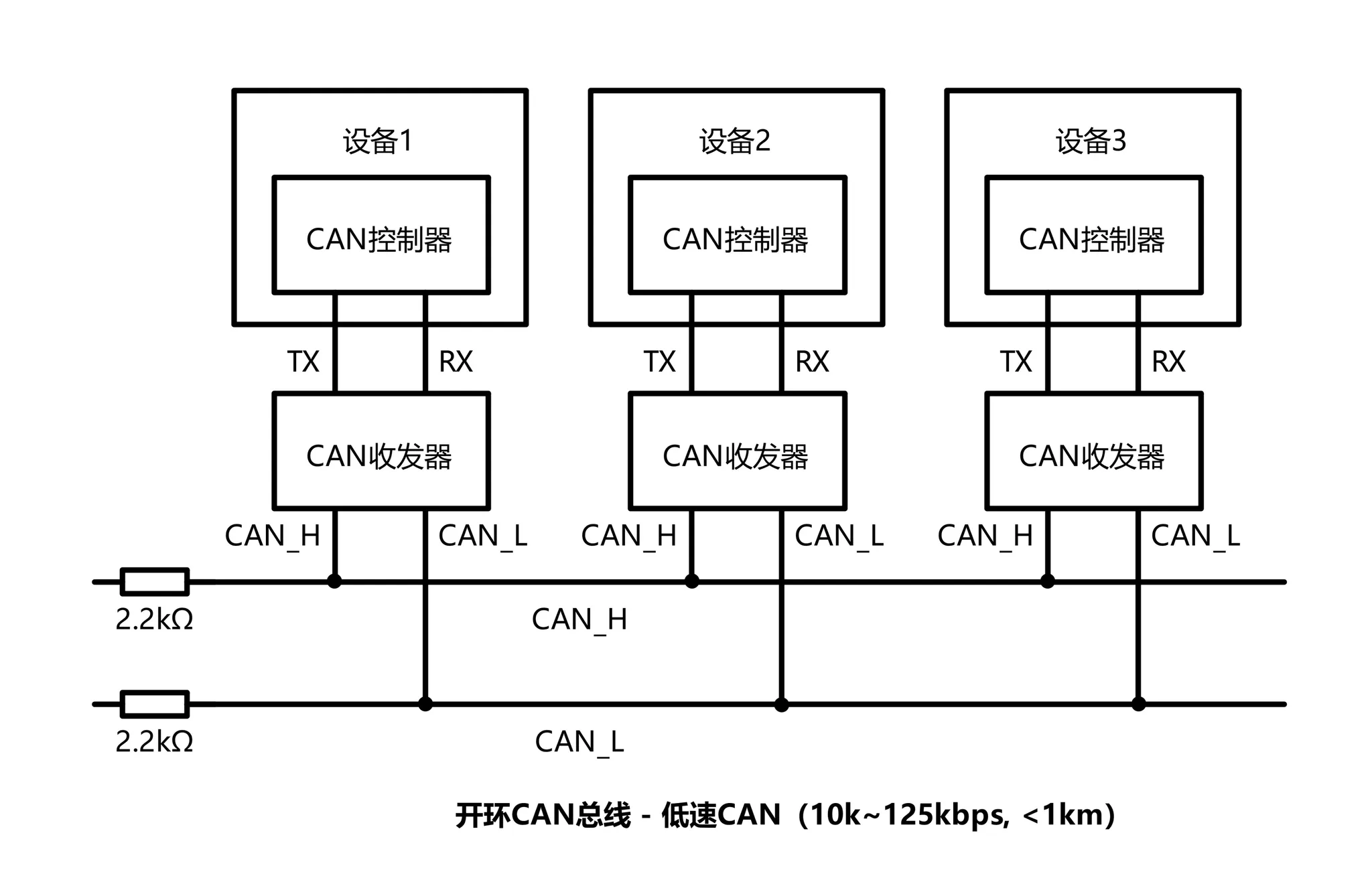
由于电路没有闭合,因此没有收紧作用,但是有防止回波反射的作用
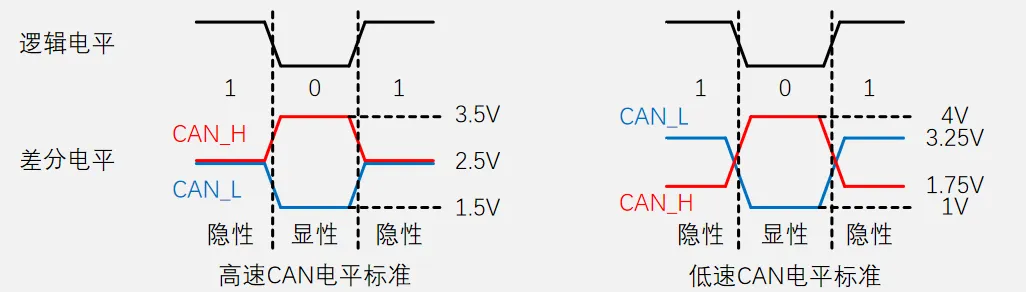
3、CAN总线的点评标准
CAN总线采用差分信号,即两线电压差(CAN_H-CAN_L)传输数据位
-
高速CAN规定
电压差为0V表示逻辑1(隐性电平)(收紧)
电压插为2V表示逻辑0(显性电平)(张开)
-
低俗CAN规定
- 电压差为-1.5V表示逻辑1(隐性电平)(默认电平CAN_L高于CAN_H)
- 电压差为3V表示逻辑0(显性电平)(CAN_H高于CAN_L)
时序电路图
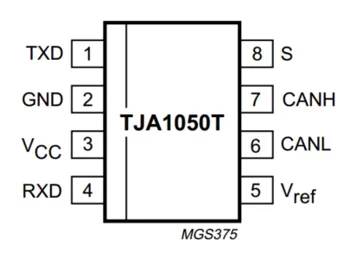
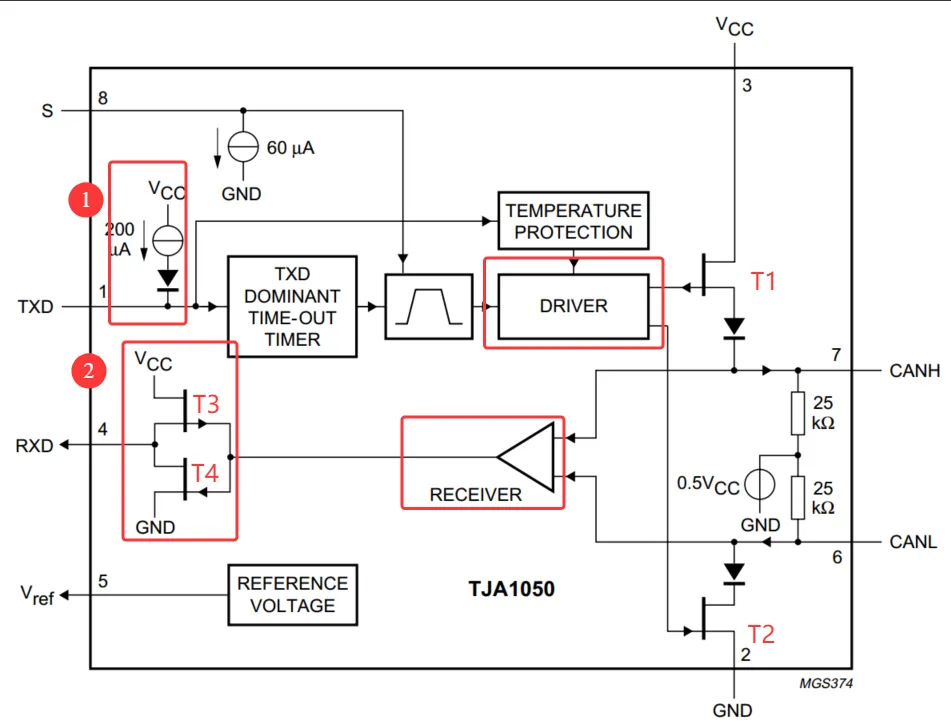
4、CAN收发器内部框图
(1)收发器引脚图介绍
-
特点
1、5V供电
2、TX,RX分别与 CAN控制器的TX,RX相连
3、CAN_H,CAN_L与CAN总线相连
4、Vref 用来配置参考电压,可以不连
5、S用来配置高速模式还是静默模式,可以不连
(2)硬件图介绍
-
TX介绍
通过①可知默认是发送高电平的,最终是由DRIVER控制其变化的
当其输出1的时候,T1和T2都是关闭状态,此时由两个25千欧姆的电阻我们可以知道,此时的CAN_H与CAN_L都是0.5VCC,两线压差为0,即表示隐性电平(1)
其当输出0的时候,T1和T2都是导通状态,此时VCC作用在CAN_H上,GND作用在CAN_L上,此时两线压差为VCC,即表示显性电平(0)
-
RX介绍
②部分是一个电压反相器,我下面将介绍。我们看RECEIVER,此时
如果它输出高电平即压差VCC,到电压反相器处,T3截至,T4导通,此时RXD输出低电平(0)
如果它输出低电平即压差0,到电压反相器处,T3导通,T4截至,此时TXD输出的是VCC(高电平)(1)
知识点3【CAN总线的帧格式】
数据帧:发送设备主动发送设备(广播式)
遥控帧:接收设备主动请求数据(请求式)
错误帧:某个设备检测到错误时向其他设备通知错误
过载帧:接收设备通知其尚未做好接收准备
帧间隔:用于将数据帧和遥控帧与前面的帧分隔开
我们主要学习数据帧,因为数据帧最复杂,且最常用,遥控帧与数据帧类似,可类比学习;错误帧,过载帧,帧间隔初学可不必关心,了解即可
1、数据帧
数据帧分为标准 和 拓展格式,它主要用IDE位区分。下面是标准格式的说明:

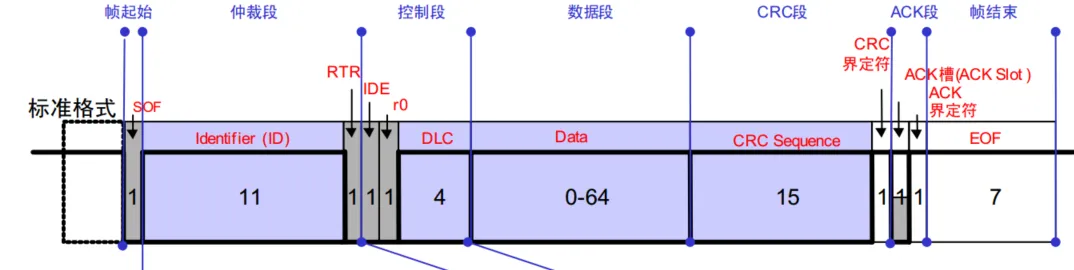
(1)SOF(Start of Frame) 1bit
帧起始,表示后面一段波形位传输的数据位
(2)仲裁段:ID + RTR 11bit + 1bit
ID:标识符,区分功能,同时决定优先级
范围:0x000 ~ 0x7FF
RTR:远程请求标志位,用来区分是数据帧(0)还是遥控帧(1)
相同ID的数据帧和遥控帧,数据帧的优先级高于遥控帧,因为数据帧此位为0(0的优先级高于1)
(3)IDE 1bit
IDE:ID拓展标志位,用来区分是标准格式(0)还是拓展格式(1)
(4)r0 1bit
r0:保留位,必须为显性0
0的优先级高,能够标准数据优先级高于以后拓展的优先级
(5)DLC 4bit
DLC:表示数据段的长度,我们前面说有效载荷是1-8字节可以灵活转换,就是通过这一位控制的
(6)数据段 0~64bit
数据段:有效载荷,根据DLC分配长度,总位数需要是8的倍数
(7)CRC 15bit
CRC:循环冗余校验,校验位,15位,我在之前的博客介绍过方法
(8)CRC界定符 1bit
CRC界定符:必须是隐性电平(1):作为间隔符;保证发送方释放总线控制权
(9)ACK 1bit
ACK槽:应答,当发送方发送完数据的主要内容后,释放总线,总线位隐性状态,接收方收到数据,会在ACK槽这一位,把总线拉开(产生电压差),即显性状态,然后发送方会读取槽的状态——若为0,则说明有接收方,若为1,则说明发送失败,重发(需要配置),或者忽略
注意:此时可以有多个接收方共同操作ACK槽
(10)ACK界定符 1bit
ACK界定符:发送方发送1——目的:作为间隔符;保证接收方应答完后释放总线
(11)EOF
EOF:7个隐性(1),作为帧结束标志
注意事项
通过对数据帧的分析,我们可以知道:
1、数据帧并不是但由发送方单独完成的,而是收发方共同完成的。
2、数据帧是我们发送应答位之前,接收方就已经接收到了数据。即发送方的数据帧还没有结束,接收方就已经接收到了数据。
- 补充:
- CAN总线数据传输是边发边收,从SOF后,每一位都会立即出现在CAN总线上。并且所有节点(包括目标接收节点和其他节点)在发送的同时又在监听总线。接收节点逐位接收发送节点发来的数据。
- 我们上面说的是接收方接收到了数据,但仅限于接收到了,接收节点还会对数据进行处理(CRC的校验,位同步,位填充移除等操作),并不意味着 接收节点已经确认数据数据有效,或者 已准备好使用数据,还需要结合其返回的ACK判断
3、CAN总线发送数据是高位先行
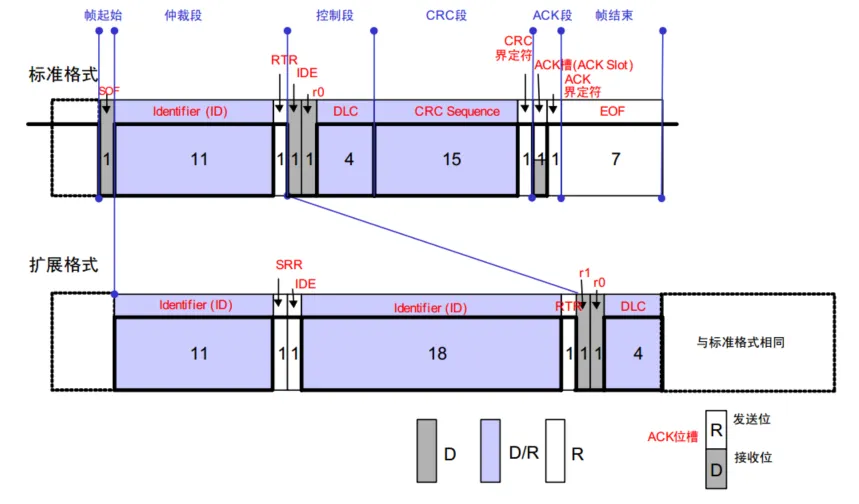
扩展格式

拓展格式出现的原因:标准格式的ID不够用了,需要拓展一些
SSR:隐性电平1
为1的原因:优先级低
IDE:隐性电平1,表示是拓展格式
扩展ID是29位的,因此它的范围是0x0000 0000 ~ 0x1FFF FFFF,注意最高位!
下面有具体的案例 这里大家了解就好。
2、遥控帧
遥控帧与数据帧的区别:无数据段,RTR为隐性电平1
无数据段,但是DLC不一定为0,此时的DLC等于它请求的、期望接收方回复的数据帧的数据长度(0-8Byte)
遥控帧的流程:请求方发送发出遥控帧请求数据,遥控帧也是以广播的形式发出,但遥控帧包含请求ID,响应请求的一方通过相同ID识别此帧,并发送数据帧 反馈给请求方。可见遥控帧是一来一回两个过程。
3、错误帧
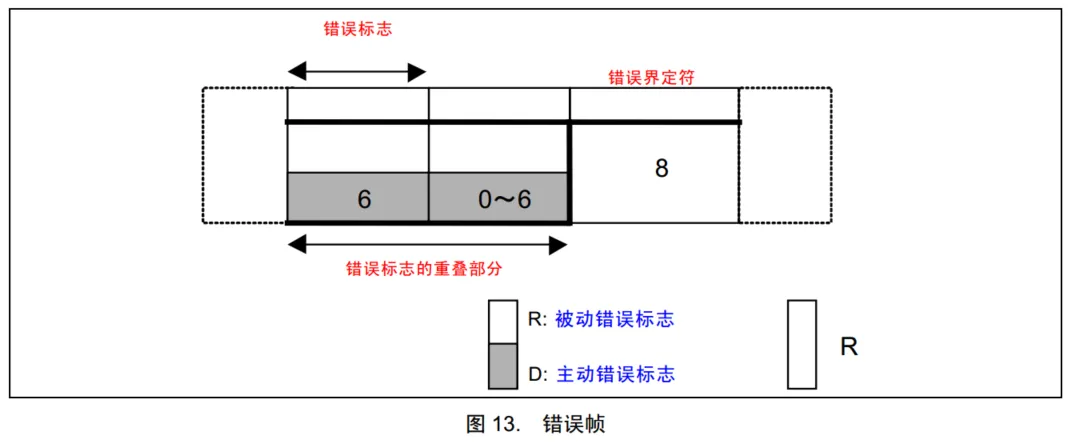
某个设备检测出错误时,向其他设备通知错误。
错误帧可以叠加在数据帧上,并且可以破坏数据帧的数据——发现此帧数据有误,就会破坏此数据,防止其他设备使用
4、过载帧
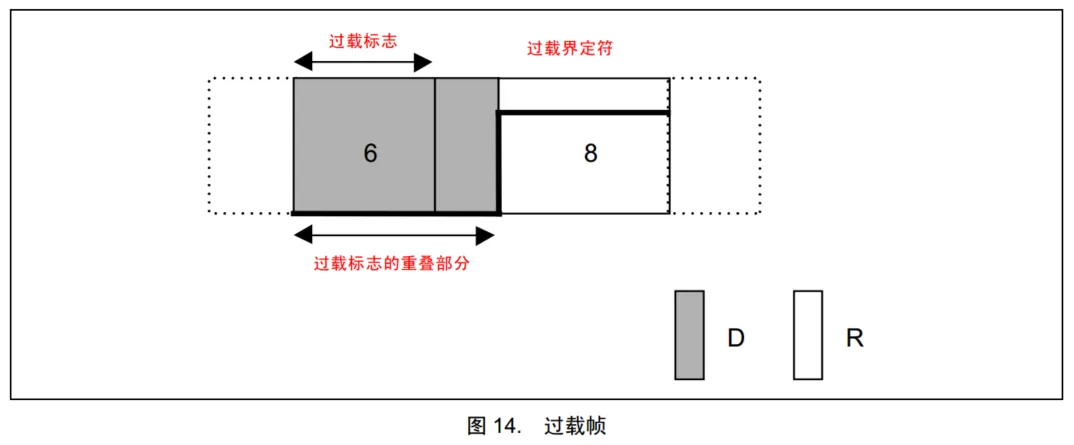
当发送方发送数据太快,接收方来不及接收,就会发出此帧。目的是延缓发送方的数据发送,避免数据丢失
由于数据是发送方主动发出的,接收方无法直接调整其发送频率,因此接收方就需要借助此方式 延缓 发送方的发送频率。
即 将数据破坏掉,发送方发不出去,就会重发。在这个发送和破坏的过程中,数据数据频率就被降低了。
它与错误帧的格式相同,但产生条件和代表的含义不同
5、帧间隔
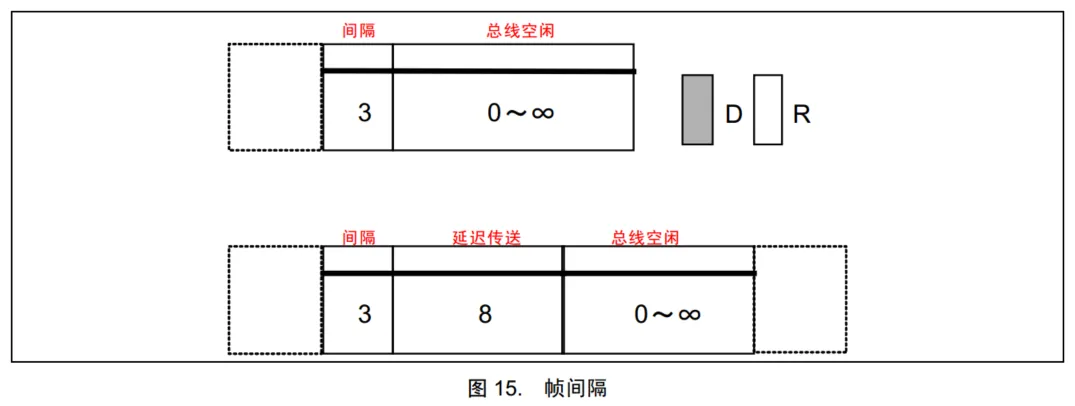
帧间隔也分为主动错误和被动错误状态。
主动错误:帧间隔是3 位
被动错误状态:帧间隔是3 + 8位,进行延迟传输,以减少它发送的速率,并且将其置于仲裁不利的处境,尽量减少此设备干扰总线。
大家只要知道:连续发送数据帧时,会有一段帧间隔就行
知识点4【位填充处理】
1、位填充规则
发送方每发送5个相同电平后,自动追加一个相反电平的填充位,接受方检测到填充位后,会自动移除填充位,恢复原始数据。
2、位填充作用
(1)防止波形长时间不变化,导致接收方不能精确:内部需要借助跳变沿来矫正采样点(误差补偿);如果数据长时间没有变化,就不会有跳变沿,也就没有了采样点矫正过程,因此时钟偏差一点都会导致数据错误。
(2)将正常数据流 与{”错误帧“ 和”过载帧“}区分开,保证正常数据流不会出现6个即6个以上的相同电平。以保证**”错误帧“ 和”过载帧“**叠加在数据帧之上时立刻就能发现它们。
(3)保证CAN总线在发送正常数据流的活跃状态,防止被误认为总线空闲
CAN总线规定:出现连续11个1后,被认为总线空闲
3、案例说明

注意事项
位填充插入的数据位 会与 后续的数据位合并 进行新的位填充判定
知识点5【具体波形分析】
-
标准数据帧,报文ID为0x555,数据长度1字节,数据内容为0xAA

-
标准数据帧,报文ID为0x666,数据长度2字节,数据内容为0x12, 0x34

-
扩展数据帧,报文ID为0x0789ABCD,数据长度1字节,数据内容为0x56

-
标准遥控帧,报文ID为0x088,数据长度1字节,无数据内容
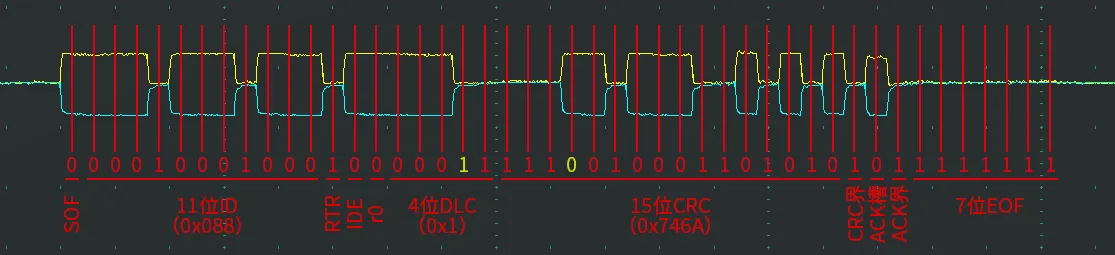
再次强调:这里不能是0x888,因为11位最高位只能是7 即最大为0x7FF
大家自行分析,就当练习了,大家可以打印出来,或者转成PDF后分析结合电容笔分析。

















 1033
1033

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









