






概要
在nx板上开发智能运输机器人,参照国外驴子机器人,实现机器人在果园里跟随运输搬运。主体视觉跟随,激光雷达记录轨迹,实现轨迹的循迹,功能已实现,现需要在其基础上添加物理按键,方便农户操作(面向gtp编程)
整体架构流程
1.查阅NVIDIA Jetson NX的GPIO相关资料
2.了解物理按键基本接线办法
3.接线
4.编写ros节点,实时监测物理按键状态,检测到按键被按下或者释放时,触发对应事件
技术细节
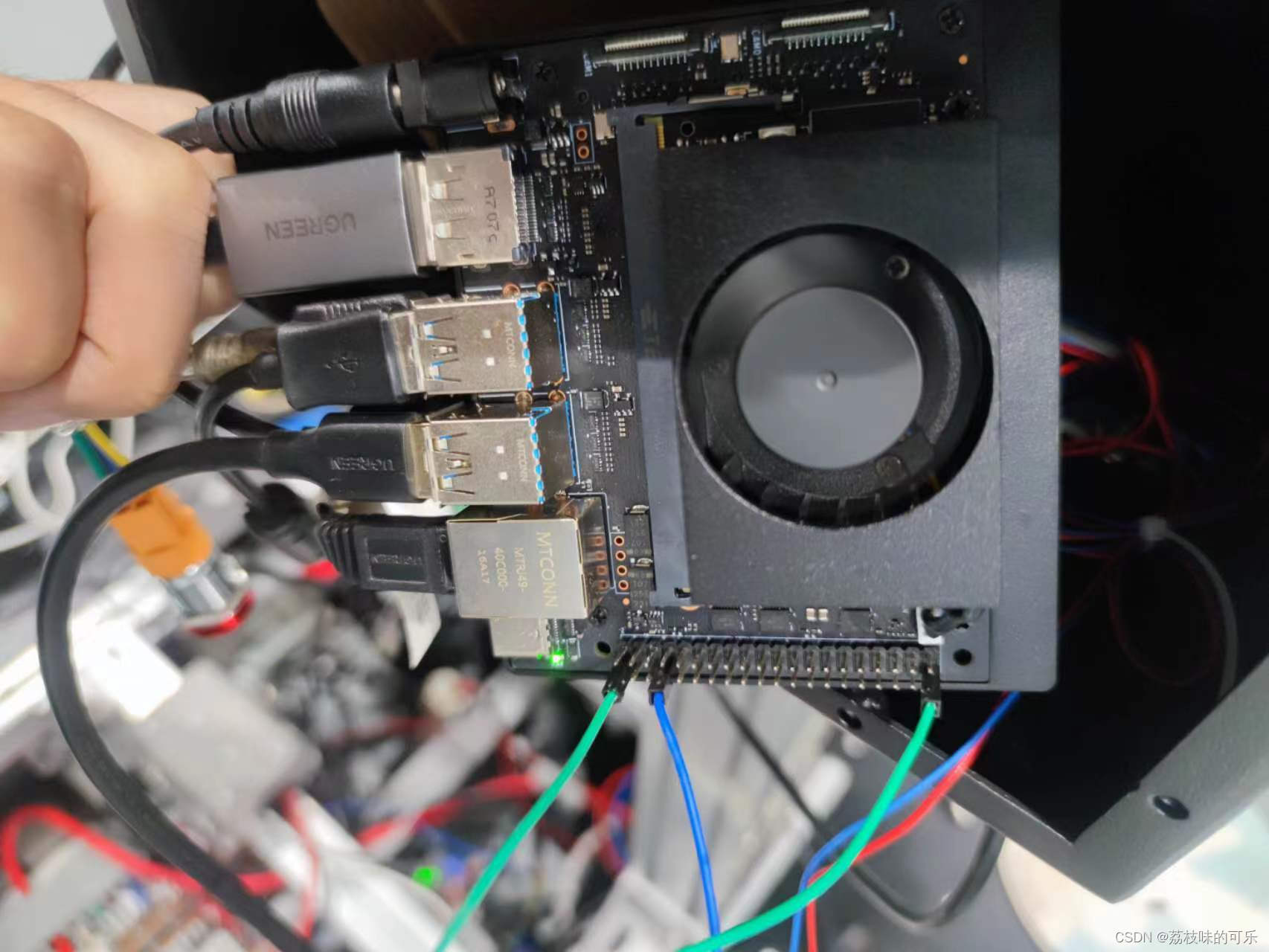
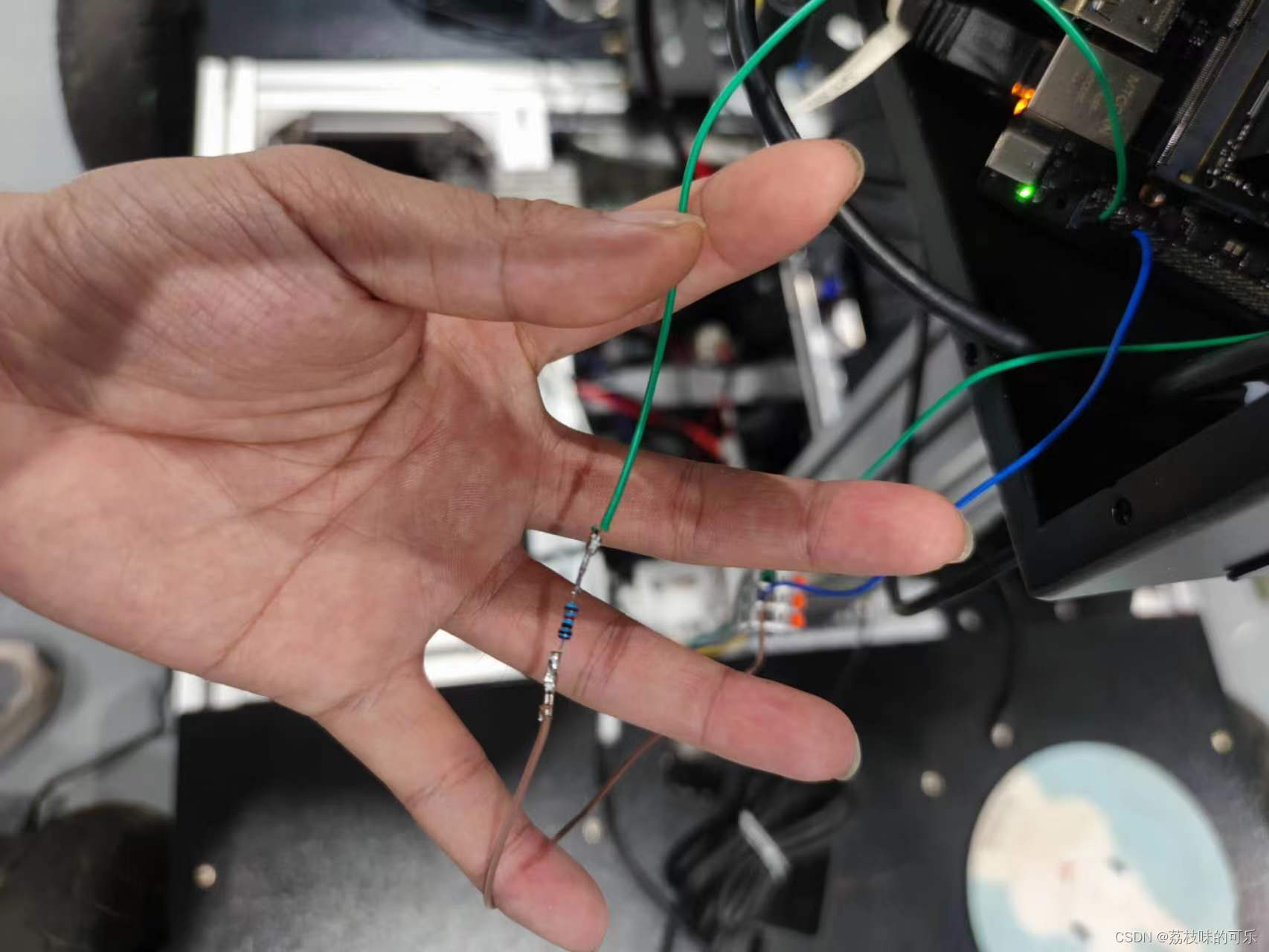
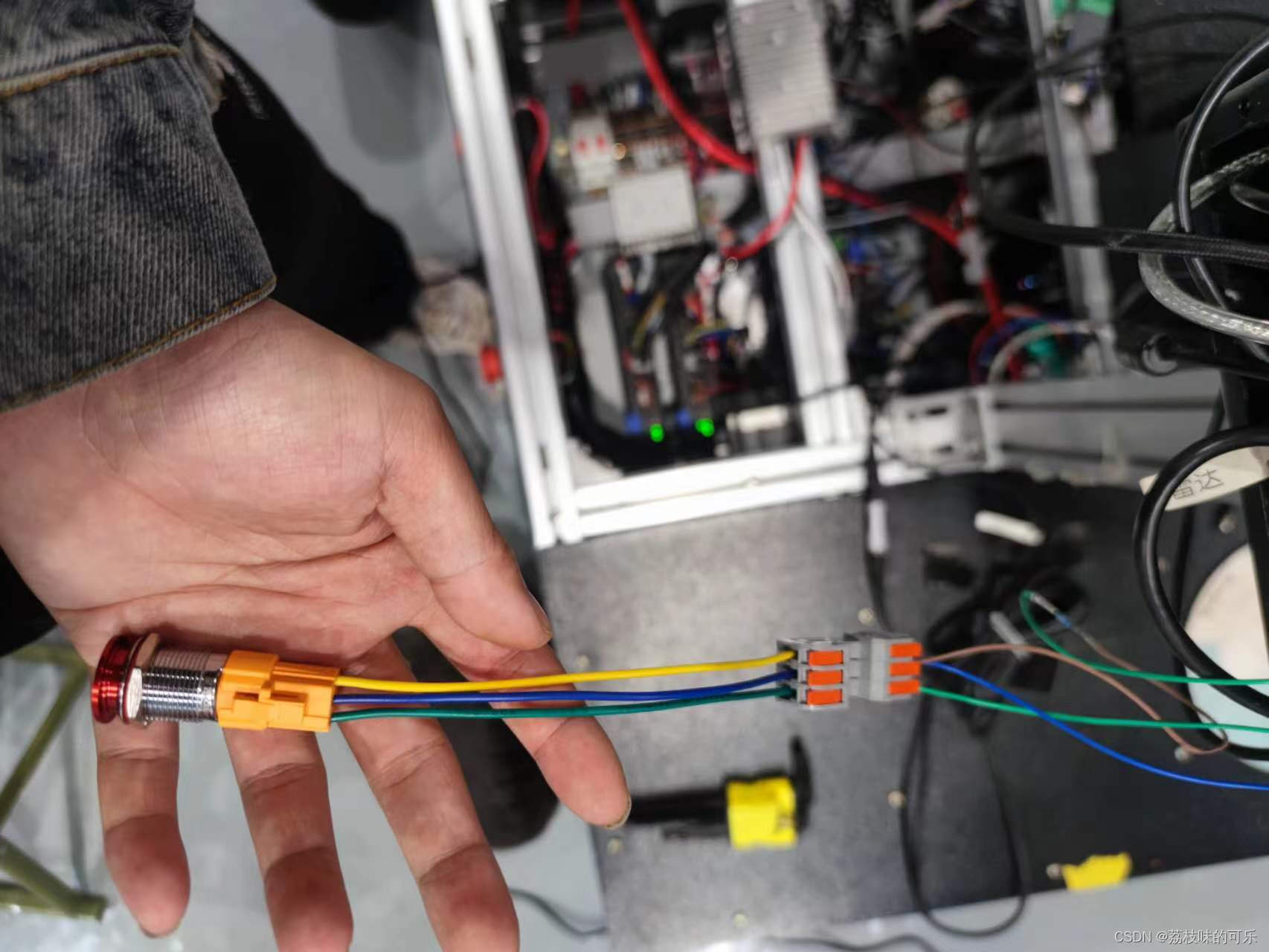
这里我选的的3引脚的按钮,绿线公共端接nx板GND,蓝线常开引脚接nx板7号引脚,注(因为我nx板库不支持直接设置内部上拉电阻)所以我外接了10kΩ的电阻(没有现成的就拆,比较常见,我就是拆的坏仪器上的),10kΩ一端连3.3v及1号引脚,一端连按钮蓝线。
小结
小白一枚,面向chatgtp编程,在强大的ai工具辅助下,在加上自己反复尝试琢磨,成功,还是有点小成就感的。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









