







基于遗传算法(Genetic Algorithm, GA)整定的 PID 控制 是一种智能优化方法,利用遗传算法搜索最佳 PID 参数(Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd),以提高控制系统的性能。遗传算法通过模拟生物进化过程,利用选择、交叉和变异等操作,找到满足性能指标的最优控制参数。
原理分析
-
传统 PID 控制问题
- PID 控制器需要根据系统特性合理设置比例、积分和微分增益。
- 传统方法(如试凑法、Ziegler-Nichols法)可能无法应对复杂、非线性或时变系统。
-
遗传算法的引入
- 遗传算法通过全局搜索优化 Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd,避免局部最优。
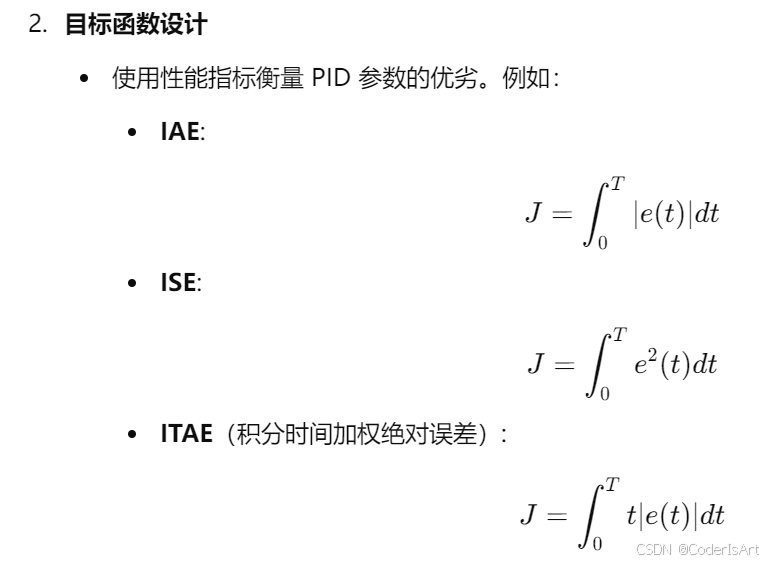
- 定义目标函数(性能指标),如积分绝对误差(IAE)、**积分平方误差(ISE)**等,评估每组 PID 参数的优劣。
-
PID 参数优化流程
- 编码:将 PID 参数 Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd 编码为遗传算法的个体。
- 初始种群:随机生成多组 PID 参数组成初始种群。
- 目标函数:评估每组 PID 参数在系统中的控制效果。
- 选择、交叉、变异:通过遗传操作生成下一代,逐步逼近最优参数。
- 迭代:不断优化,直至满足收敛条件。
系统框图
系统框图的主要组成:
- 遗传算法模块:负责优化 PID 参数。
- 输入:初始种群、目标函数。
- 输出:最优 PID 参数 Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd。
- PID 控制器:利用优化后的参数控制系统。
- 被控对象:控制目标,如温度控制、电机位置控制等。
- 性能评价模块:计算控制误差,反馈给遗传算法。
控制算法流程
-
初始化遗传算法
- 设置种群大小、交叉概率、变异概率和最大迭代次数。
- 随机生成种群,每个个体表示一组 PID 参数。
-
迭代优化
- 适应度计算:根据目标函数计算每个个体的适应度。
- 选择:保留表现较好的个体。
- 交叉:生成新个体,模拟基因重组。
- 变异:随机改变个体部分基因,增加多样性。
- 更新种群,重复计算,直到满足停止条件。
-
最优参数应用
- 输出最优 PID 参数,将其应用到控制器中。
C++ 实现
以下为基于遗传算法的 PID 参数优化离散实现代码:
#include <iostream>
#include <vector>
#include <cmath>
#include <algorithm>
#include <random>
struct PIDParams {
double Kp;
double Ki;
double Kd;
};
// 被控对象模拟(简单一阶系统)
double simulateSystem(double input, double dt) {
static double output = 0.0;
static double last_input = 0.0;
output += dt * (input - output); // 简化的一阶惯性
last_input = input;
return output;
}
// 目标函数:计算控制误差积分绝对误差 IAE
double evaluatePID(const PIDParams& pid, double setpoint, double dt, int steps) {
double error_sum = 0.0;
double integral = 0.0, derivative = 0.0, prev_error = 0.0;
double output = 0.0;
for (int i = 0; i < steps; ++i) {
double error = setpoint - output;
integral += error * dt;
derivative = (error - prev_error) / dt;
double control_signal = pid.Kp * error + pid.Ki * integral + pid.Kd * derivative;
output = simulateSystem(control_signal, dt);
error_sum += std::abs(error);
prev_error = error;
}
return error_sum; // 返回误差积分作为适应度值
}
// 遗传算法参数优化
PIDParams optimizePID(int population_size, int generations, double setpoint, double dt, int steps) {
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_real_distribution<> dis(0.0, 10.0);
std::uniform_real_distribution<> mutation_dis(-0.5, 0.5);
// 初始化种群
std::vector<PIDParams> population(population_size);
for (auto& individual : population) {
individual.Kp = dis(gen);
individual.Ki = dis(gen);
individual.Kd = dis(gen);
}
for (int gen_idx = 0; gen_idx < generations; ++gen_idx) {
// 评估适应度
std::vector<std::pair<double, PIDParams>> fitness;
for (const auto& individual : population) {
double fitness_value = evaluatePID(individual, setpoint, dt, steps);
fitness.emplace_back(fitness_value, individual);
}
// 按适应度排序(误差越小越好)
std::sort(fitness.begin(), fitness.end(),
[](const auto& a, const auto& b) { return a.first < b.first; });
// 选择最优个体
std::vector<PIDParams> new_population;
for (size_t i = 0; i < population_size / 2; ++i) {
new_population.push_back(fitness[i].second);
}
// 交叉操作
for (size_t i = 0; i < population_size / 2; ++i) {
PIDParams parent1 = new_population[i];
PIDParams parent2 = new_population[(i + 1) % (population_size / 2)];
PIDParams offspring = {
(parent1.Kp + parent2.Kp) / 2.0,
(parent1.Ki + parent2.Ki) / 2.0,
(parent1.Kd + parent2.Kd) / 2.0
};
new_population.push_back(offspring);
}
// 变异操作
for (auto& individual : new_population) {
individual.Kp += mutation_dis(gen);
individual.Ki += mutation_dis(gen);
individual.Kd += mutation_dis(gen);
}
population = new_population; // 更新种群
}
return population.front(); // 返回最优个体
}
int main() {
double setpoint = 1.0; // 目标值
double dt = 0.1; // 时间步长
int steps = 100; // 仿真步数
int population_size = 20;
int generations = 50;
PIDParams optimal_pid = optimizePID(population_size, generations, setpoint, dt, steps);
std::cout << "Optimal PID Parameters:\n"
<< "Kp: " << optimal_pid.Kp << "\n"
<< "Ki: " << optimal_pid.Ki << "\n"
<< "Kd: " << optimal_pid.Kd << "\n";
return 0;
}
特点与优势
-
全局优化能力
- 能够避免局部最优,适合复杂控制系统。
-
自适应能力强
- 可动态适应系统参数变化。
-
灵活性高
- 支持多种目标函数(IAE, ISE, ITAE)。
总结
基于遗传算法整定 PID 控制,通过智能搜索策略优化控制参数,有效提升复杂系统的控制性能。广泛应用于工业自动化、机器人控制等领域,尤其适用于非线性、时变系统的优化控制问题。

















 247
247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









