







什么是链表、队列、栈?
链表:
当需要存储多个相同数据类型的时候,可以使用数组存储,数组可以通过下标直接访问,但数组有个缺点就是无法动态的插入或删除其中的元素(特别是操作第一个位置上的元素),而链表弥补了这个缺陷,对于元素的插入和删除操作是很方便的,不过访问元素的“性能”就差很多了。
所谓单链表,即只有一个指针,指向下一个元素(结点)的地址,只要知道单链表的首地址,就可以遍历整个链表了。由于链表结点是在堆区动态申请的,其地址并不是连续的,因此无法进行随机访问,只有通过前一结点的next指针才能定位到下一个结点的指针。
单链表只能向后遍历,不能逆序遍历,所以有了使用更广泛的双链表。即结点多了一个存储前一个结点地址的prev指针。双链表可以双向遍历,但也只能按顺序访问。
队列:
队列就像我们平时排队一样,按照数据到达的顺序进行排队,每次新插入的一个结点排在队尾,删除一个结点只能从头才能出队。简言之,对元素的到达顺序,按照“先进先出”的原则。由于队列频繁的插入和删除,一般为了高效,使用固定长度的数组实现,并且可循环使用数组空间,在操作之前要判断处理的队列是否已满或为空。如果要动态长度,可以用链表实现,只要同时记住链表的首地址(队头front)和尾地址(队尾rear)。
栈:
栈的特点正好与队列相反,按照数据进栈的逆序出栈,即“先进后出”,每次入栈将元素放在栈顶,出栈时也只能从栈顶出栈,与队列类似,一般用定长数组存储栈元素,而不是动态的申请结点空间。进栈一般被叫做压栈,出栈被叫做弹栈。
由于压栈弹栈都在栈顶,所以只需要一个size字段存储当前栈的大小,初始化size为0,每次压栈时,size+1,注意栈是否已满,弹栈则size-1。
什么是树(平衡二叉树、二叉排序树、B树、B+树、R树、红黑树)?
参考:https://blog.csdn.net/v_july_v/article/details/6530142
为什么会有树这个概念呢?因为已有的数据结构(数组、链表)不能很好的平衡静态操作和动态操作的时间开销。
| 时间复杂度 | 数组 | 链表 |
| 静态操作(查找) | O(1) | O(n) |
| 动态操作(插入、删除) | O(n) | O(1) |
对于树这种数据结构而言,最显著的特点就是有且只能有一个根节点(空树除外),每个节点可以有多个子结点,除了根结点,其他结点只能有一个父结点。树的种类繁多,一般谈论的最多的是二叉树,每个结点有不超过两个的子结点。
平衡二叉树 & 二叉排序树
二叉排序树(Binary Search Tree,BST,也叫二叉搜索树),构造一棵二叉排序树也很简单,大于根节点的放在根节点的右子树上,小于根结点的放在根结点的左子树上(等于根结点的视情况而定)。如果写程序的话,可以采用递归的方式,而且由于不存在重叠子问题的情况,因此递归的性能已经足够好(不考虑栈溢出的情况)。
二叉排序树在通常情况下可以达到O(lgn)的静态、动态操作的时间复杂度,但是存在一种特殊情况,若输入的本来就是有序的,这时二叉树就退化成了链表。为了消除二叉树对于输入的敏感特性,引入了平衡二叉树(AVL),事实上平衡二叉树应该叫平衡二叉排序树也合理。平衡二叉树只要保证每个节点左子树和右子树的高度差小于等于1就可以了。
B树 & B+树
1981年,盖茨曾说“640kb对每个人来说是足够的”,现在看来像是一个笑话,可能当时intel生产的内存只有640KB,目前好一点的机器都已经达到16GB的内存了,但是事实上这句话仍然有一定的道理。
操作系统中,我们应该学过寄存器的访问速度和容量是此消彼涨的,速度最快的当属CPU上火了寄存器,然后就是cache(高速缓存),然后是内存,再就是外部磁盘等,当两个处在不同层级的存储器(比如内存和外部磁盘)交换数据时,我们称之为I/O。而I/O相当耗时,要尽量避免使用。
B树(B-Tree,“B-树”这种翻译我不是很认同)的出现就是为了解决这个问题。B树由于是多路二叉树(根结点有两个子结点,其他结点子结点不止两个),它的高度要远低于平衡二叉树,一般来讲,二叉平衡树每下降一层就执行一次磁盘I/O操作,以1GB数据为例,平均需要30次磁盘I/O才能读取到数据,而B树每下降一层,每个结点都会读入多个关键码,因此B树适用于实现磁盘的读写逻辑。
B 树是为了磁盘或其它存储设备而设计的一种多叉(相对于二叉树,B树每个内结点有多个分支,即多叉)平衡排序树。与下面要介绍的红黑树很相似,但在降低磁盘I/0操作方面要更好一些。许多数据库系统都一般使用B树或者B树的变形结构(如B+树)来存储信息。
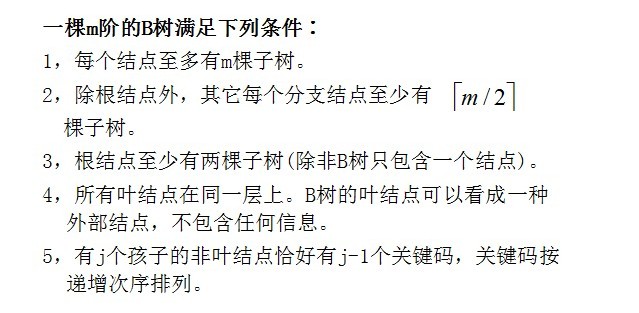
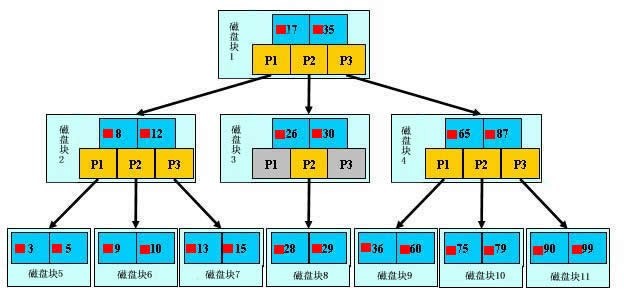
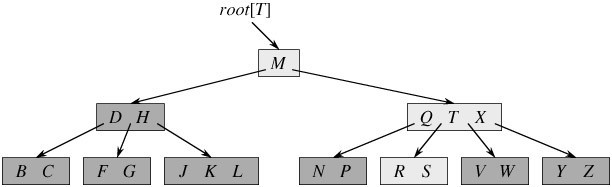
从上图你能轻易的看到,一个内结点x若含有n[x]个关键字,那么x将含有n[x]+1个子女。如含有2个关键字D H的内结点有3个子女,而含有3个关键字Q T X的内结点有4个子女。
B树中的每个结点根据实际情况可以包含大量的关键字信息和分支(当然是不能超过磁盘块的大小,根据磁盘驱动(disk drives)的不同,一般块的大小在1k~4k左右);这样树的深度降低了,这就意味着查找一个元素只要很少结点从外存磁盘中读入内存,很快访问到要查找的数据。
Bucket Li:"mysql 底层存储是用B+树实现的,why?内存中B+树是没有优势的,但是一到磁盘,B+树的威力就出来了"。
B树:有序数组+平衡多叉树; B+树:有序数组链表+平衡多叉树; B*树:一棵丰满的B+树。
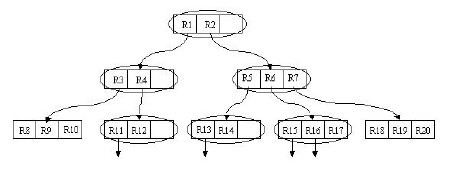
R树
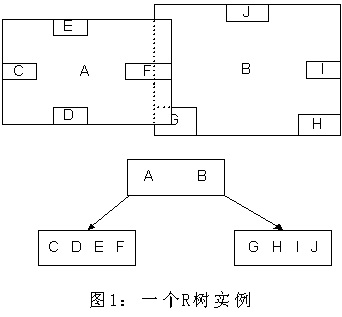
处理空间存储问题,R树在数据库等领域做出的功绩是非常显著的。它很好的解决了在高维空间搜索等问题。举个R树在现实领域中能够解决的例子:查找20英里以内所有的餐厅。如果没有R树你会怎么解决?一般情况下我们会把餐厅的坐标(x,y)分为两个字段存放在数据库中,一个字段记录经度,另一个字段记录纬度。这样的话我们就需要遍历所有的餐厅获取其位置信息,然后计算是否满足要求。如果一个地区有100家餐厅的话,我们就要进行100次位置计算操作了,如果应用到谷歌地图这种超大数据库中,这种方法便必定不可行了。
R树就很好的解决了这种高维空间搜索问题。它把B树的思想很好的扩展到了多维空间,采用了B树分割空间的思想,并在添加、删除操作时采用合并、分解结点的方法,保证树的平衡性。因此,R树就是一棵用来存储高维数据的平衡树。
每个R树的叶子结点包含了多个指向不同数据的指针,这些数据可以是存放在硬盘中的,也可以是存在内存中。根据R树的这种数据结构,当我们需要进行一个高维空间查询时,我们只需要遍历少数几个叶子结点所包含的指针,查看这些指针指向的数据是否满足要求即可。这种方式使我们不必遍历所有数据即可获得答案,效率显著提高。

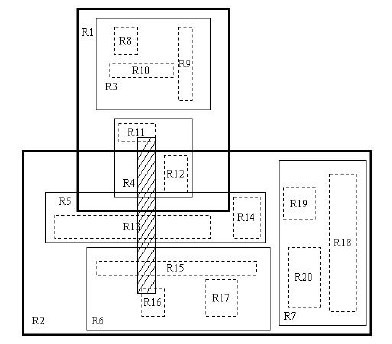
R树是一种能够有效进行高维空间搜索的数据结构,它已经被广泛应用在各种数据库及其相关的应用中。但R树的处理也具有局限性,它的最佳应用范围是处理2至6维的数据,更高维的存储会变得非常复杂,这样就不适用了。近年来,R树也出现了很多变体,R*树就是其中的一种,这些变体提升了R树的性能。
红黑树
面试参看:https://www.cnblogs.com/wuchanming/p/4444961.html
R-B Tree,全称是Red-Black Tree,又称为“红黑树”,它一种特殊的二叉查找树。红黑树的每个节点上都有存储位表示节点的颜色,可以是红(Red)或黑(Black)。


红黑树的应用比较广泛,主要是用它来存储有序的数据,它的时间复杂度是O(lgn),效率非常之高。例如,Java集合中的TreeSet和TreeMap,C++ STL中的set、map,需要使用动态规则的防火墙系统,使用红黑树而不是散列表被实践证明具有更好的伸缩性。Linux内核在管理vm_area_struct(虚拟内存)时就是采用了红黑树来维护内存块的。
对于链表、数组、树和图来说,它们每次的动态操作都会完全遗忘之前的状态,转而到达全新的状态,这种数据结构称为ephemeral structure。另一种数据结构可以记录某一历史时刻的状态,在访问时可以根据版本好+目标数据进行访问,这种数据结构称为persistent structure。事实上,红黑树可以实现这种对历史版本的记录。
B树与红黑树最大的不同在于,B树的结点可以有许多子女,从几个到几千个。那为什么又说B树与红黑树很相似呢?因为与红黑树一样,一棵含n个结点的B树的高度也为O(lgn),但可能比一棵红黑树的高度小许多,应为它的分支因子比较大。所以,B树可以在O(logn)时间内,实现各种如插入(insert),删除(delete)等动态集合操作。
什么是堆(大根堆、小根堆)?
这里说的“堆”是一种数据结构,注意与jvm中的堆内存分开。堆必须满足以下两个条件:(1)是完全二叉树 (2)heap中存储的值是偏序(偏序只对部分元素成立关系R,全序对集合中任意两个元素都有关系R)。
大根堆:父结点的值大于等于其子结点的值;小根堆:父结点的值小于等于其子节点的值。


堆的存储:
一般用数组来存储堆,第i个结点的父结点下标为,(i-1)/2,它的左右子结点的下标为i*2+1,i*2+2。
插入一个元素:
新元素被加入到heap的末尾,然后更新树以恢复堆的次序。每次插入都是将新数据放在数组最后。可以发现从这个新数据的父结点到根结点必然为一个有序的数列,现在的任务是将这个新数据插入到这个有序数据中——这就类似于直接插入排序中将一个数据并入到有序区间中。以大根堆为例:

删除一个元素:
按定义,堆中每次都删除第0个数据。为了便于重建堆,实际的操作是将最后一个数据的值赋给根结点,然后再从根结点开始进行一次从上向下的调整。调整时先在左右儿子结点中找最大的,如果父结点比这个最小的子结点还大说明不需要调整了,反之将父结点和它交换后再考虑后面的结点。相当于从根结点将一个数据的“下沉”过程。

什么是图(有向图、无向图、拓扑)?
图:一种较线性表和树更为复杂的数据结构。图结构中结点之间的关系是任意的,图中任何两个节点都可能有关系。图通常用来描述某些事物之间的某种特定关系 ,用点代表事物,用连接两点的线表示相应两个事物间具有这种关系。
线性表:数据元素之间仅有线性关系,每个数据元素只有一个直接前驱和一个直接后继
树:树形结构中,数据元素之间有着明显的层次关系,并且每一层上的数据元素可能和下一层中多个元素(即其孩子结点)相关,但只能和上一层中一个元素(即其双亲结点)相关
在通常状况下,区分图的有向和无向的区别在于边的有向性。
有向图的基本算法: 拓扑排序(数据结构之拓扑排序)、联通分量、最短路径(Dijkstra算法和Floyd算法)。
无向图的基本算法:最小生成树(Prime算法。Kruska算法)、DFS、BFS、MFS、最短路径、最大连通图、强联通分量。




栈和队列的相同之处和不同之处?
相同点:①都是线性结构 ②插入操作都是在表尾进行 ③ 插入和删除的时间复杂度都是O(1),在空间复杂度上也相同 ④都可以通过顺序结构和链表实现 ⑤多链栈和多链队列的管理模式可以相同。
不同点:①删除数据元素的位置不同,栈在表尾进行,队列在表头进行 ②顺序栈能够实现多栈空间共享,而顺序队列不能。 ③应用场景不同;常见栈的应用场景包括括号问题的求解,表达式的转换和求值,函数调用和递归实现,深度优先搜索遍历等;常见的队列的应用场景包括计算机系统中各种资源的管理,消息缓冲器的管理和广度优先搜索遍历等。
栈通常采用的两种存储结构。
https://blog.csdn.net/sandmm112/article/details/79860236
两个栈实现队列,两个队列实现栈。
◆两个栈实现队列,实现队列的入队(enqueue)和出队(dequeue)操作。
栈的特性是先进后出(FILO),队列的特性是先进先出(FIFO),在实现dequeue时,我们的难点是如何将栈中最底层的数据拿出来,我们有两个栈,所以我们可以将一个栈中的数据依次拿出来压入到另一个为空的栈,另一个栈中数据的顺序恰好是先压入栈1的元素此时在栈2的上面。

图(1):将队列中的元素“abcd”压入stack1中,此时stack2为空;
图(2):将stack1中的元素pop进stack2中,此时pop一下stack2中的元素,就可以达到和队列删除数据一样的顺序了;
图(3):可能有些人很疑惑,就像图3,当stack2只pop了一个元素a时,satck1中可能还会插入元素e,这时如果将stack1中的元素e插入stack2中,在a之后出栈的元素就是e了,显然,这样想是不对的,我们必须规定当stack2中的元素pop完之后,也就是satck2为空时,再插入stack1中的元素。
用两个队列实现一个栈
因为队列是先进先出,所以要拿到队列中最后压入的数据,只能每次将队列中数据dequeue至最后一个,此时这个数据为最后enqueue入队列的数据,在每次dequeue时,将数据enqueue至队列2中。每次执行delete操作时,循环往复。(感觉效率低)每次删除时间复杂度O(N)

图(1):当栈里面插入元素“abcd”的时候,元素a在栈底(最后出去),d在栈顶(最先出去);
图(2):将元素“abc”从q1中头删,然后再q2中尾插进来之后,头删q1中的元素“d”,就相当于实现了栈顶元素的出栈;
图(3):同理,将元素“ab”从q2中头删,然后尾插到q1中,然后再头删q2中的元素“c”;
图(4):同理,删除元素“b”;
图(5):当栈又插入一个元素“e”时,此时元素“a”不能从队列中删除,而是将元素“a”插入q2中,再删除q1中的元素“e”,最后再删除元素“a”。
说明:其中红色框代表该队列中的元素出队列,该队列为空。















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









