






目录
传统目标检测技术
1、 帧间差分
通过连续两帧相同位置像素点间的灰度差来确定目标移动。但只适用于静态背景和目标单一条件的目标检测。仅适用于无人机悬停状态下的目标检测。
2、 背景差分法
通过预先设置背景,然后通过对检测图像和背景做差来提取目标。但实际背景与预设背景相差较大或者实际检测时光照条件发生明显变化,该方法的目标检测精度将有较大的下降。
3、 光流法
将该方法将光流作为灰度像素点在图像上的瞬时运动场,从而实现对目标的跟踪。该方法根据原理主要分为四类: 基于梯度的方法、基于匹配的方法、基于能量的方法和基于相位的方法。
工作流程为:
在图像中等间隔选取光流点;
计算光流点的运动矢量( 常用 HS 法和 LK 法等);
根据运动矢量检测运动目标。
与前两种方法相比,由于光流场能够反应像素点的灰度运动情况,所以,光流目标检测法能够进行动态背景下的目标检测。
4、 特征匹配法
通过提取待检测目标的特征点(角点、颜色特征等)建立目标模板,然后通过检测实时视频流中对应目标,进行相似性判别,从而实现目标检测。
特征匹配算法:
SIFT:
SURF:
BRISK:
FREAK:
该方法可以检测出目标,还可以进行目标识别,具有较强鲁棒性。该方法既适合动态背景也适合静态背景的目标检测。
##目标跟踪
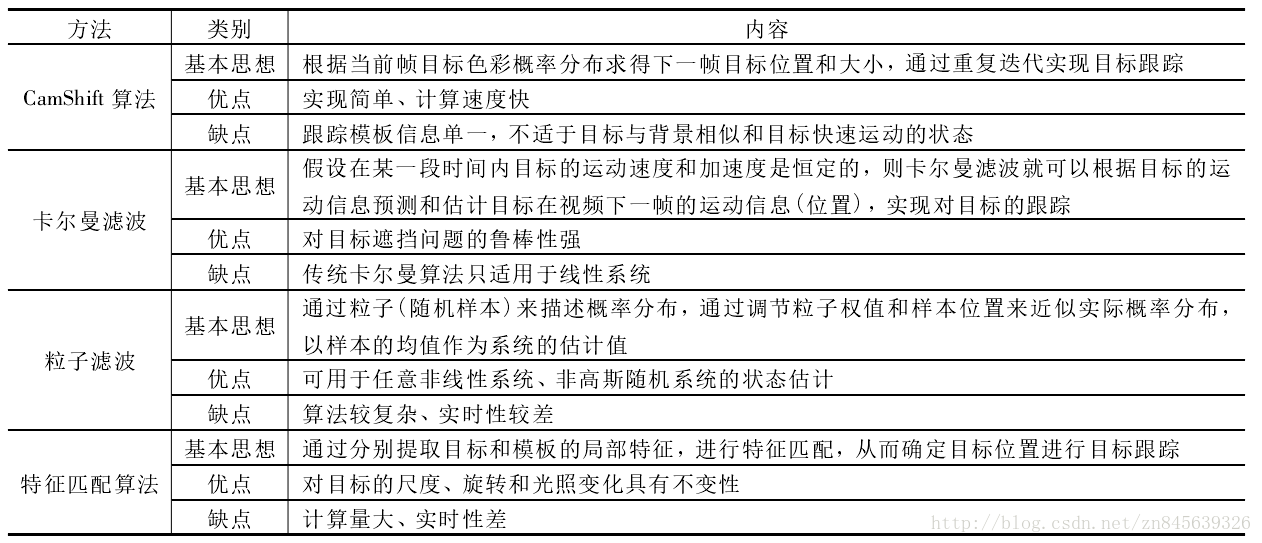
1、 CamShift算法
他是对MeanShift算法(基于核密度估计的非参数模式匹配)的改进,是一种连续自适应漂移算法。
MeanShift流程:
手动选择待跟踪目标区域,使用MeanShift颜色直方图信息作为模板,再对下一帧图像的颜色直方图提取,进行匹配,通过计算相似度获得相似度密度分布图,图中的极值位置及目标的位置。
CamShift对视频中的每一帧都进行MeanShift运算,不仅可以实现目标模板的更新,也可以实现自动调节跟踪窗口大小的功能。(有疑问?第一步是手动选择目标区域,对于发生尺度变化或外界干扰时,如何通过CamShift实现实时更新?)
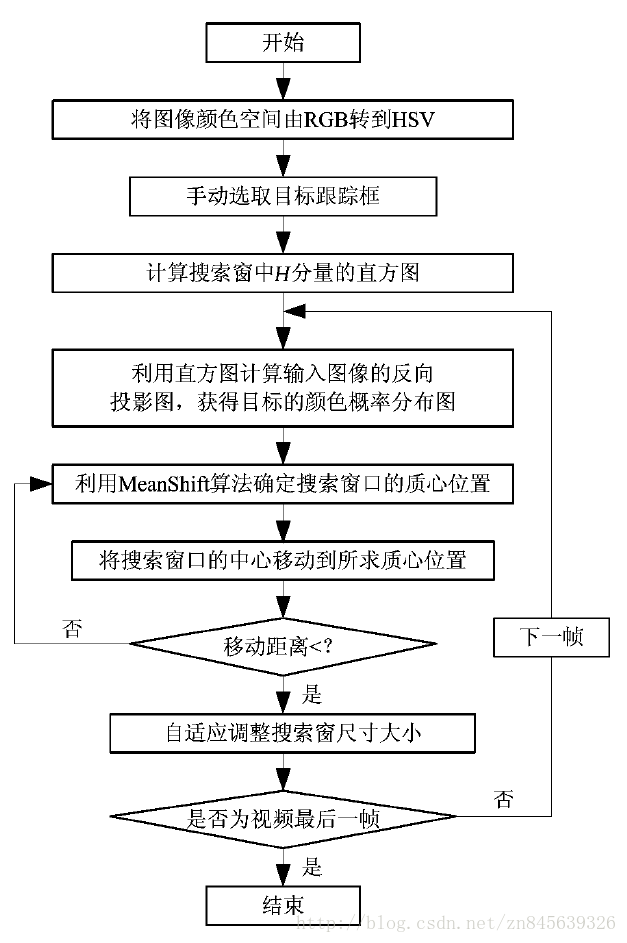
CamShift算法流程:
1)转化RGB为HSV空间,这样可以减小跟踪过程中光照的影响;
2)目标初始化,手动选取目标位置和大小,并提取目标区域的H分量直方图;
3)计算图像反向投影,认为反向投影图中像素点亮度越大,其为目标区域的概率就越大;
4)利用MeanShift算法进行迭代运算,移动搜索窗口的中心到迭代的最大位置;
5)调整搜索窗口的大小;
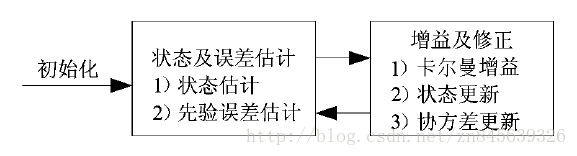
2、 卡尔曼滤波算法
一种小方差最佳线性递推方法,通过当前目标信息可以实现对下一帧目标位置进行预测,从而实现目标的跟踪。
状态方程实现对系统的状态进行客观的描述;预测方程可以实现系统对下一时刻状态的预测。
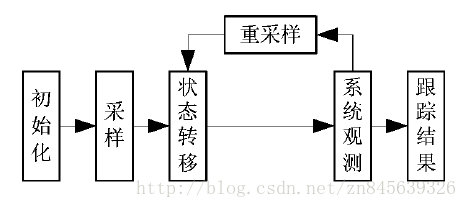
3、粒子滤波算法
算法实质是用带有权值的粒子表示后验概率,这些粒子随着目标模型的移动而移动,最后与目标模板进行匹配并更新权值,这些粒子的状态加权即为后验概率。
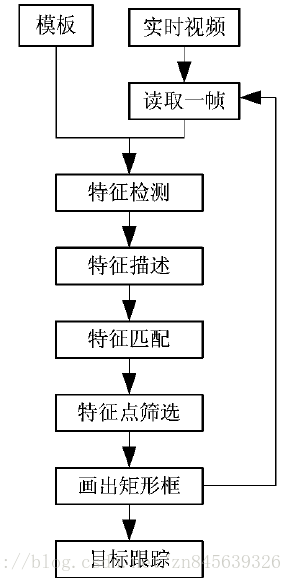
4、 特征匹配算法
采用目标的局部特征信息,通过特征匹配来进行跟踪的算法(SIFT、SURF、ORB、BRISK、FREAK)。
1)特征点检测;
2)特征描述;
3)特征点筛选;
4)特征点匹配
四种算法的对比:















 416
416

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









