






Offboard模式是一种允许外部计算设备接管飞行控制器控制权的操作方式。通常,飞行控制器负责处理传感器数据并执行内部算法以调整电机转速,确保稳定飞行及任务完成。然而,在面对复杂的航迹规划、实时避障或多机协同等高精度和快速响应需求时,内置飞行控制器的算力无法快速完成复杂的计算。面临这种情况,Offboard模式可以通过MavLink协议使外部计算单元把计算得到的姿态、位置或速度等指令发给飞行控制器,从而实现由上位机对无人机的精细控制。这种方式不仅增强了系统的灵活性和功能性,同时也为高级应用开发提供了可能。
Offboard模式效果展示:
“我们使用雷迅V5 Plus飞控作为示例平台,在纯硬件仿真(SIH)中使无人机进入Offboard模式,并通过发布auto_cmd指令实现对无人机的精确控制,下方视频为Offboard模式下无人机执行任务的效果展示。
Offboard模式效果展示
Offboard模式使用教程:
视频教程:
如需复现,可参考下方视频,并在文末点击阅读原文获取offboard_demo.c文件(提取码ejjv),然后将offborad_demo.c文件复制到target/cuav/v5_plus/tasks目录下即可复现。
Offboard模式使用教程
1.在VScode中打开FMT-Firmware,进入target/cuav/v5_plus/tasks目录下,在这里新建一个.c文件,.c文件需要与FMT飞控代码格式保持一致,固件编译成功后,即可执行Offboard模式。我们在视频中展示的任务是无人机执行一条五边形的航线,任务执行过程中分别使用了无人机的偏航角速率、Local系下的xyz位置、无人机的偏航、Body系下的轴向速度、Local系下的轴向加速度、姿态角以及Global系下的经纬高等多种状态量。

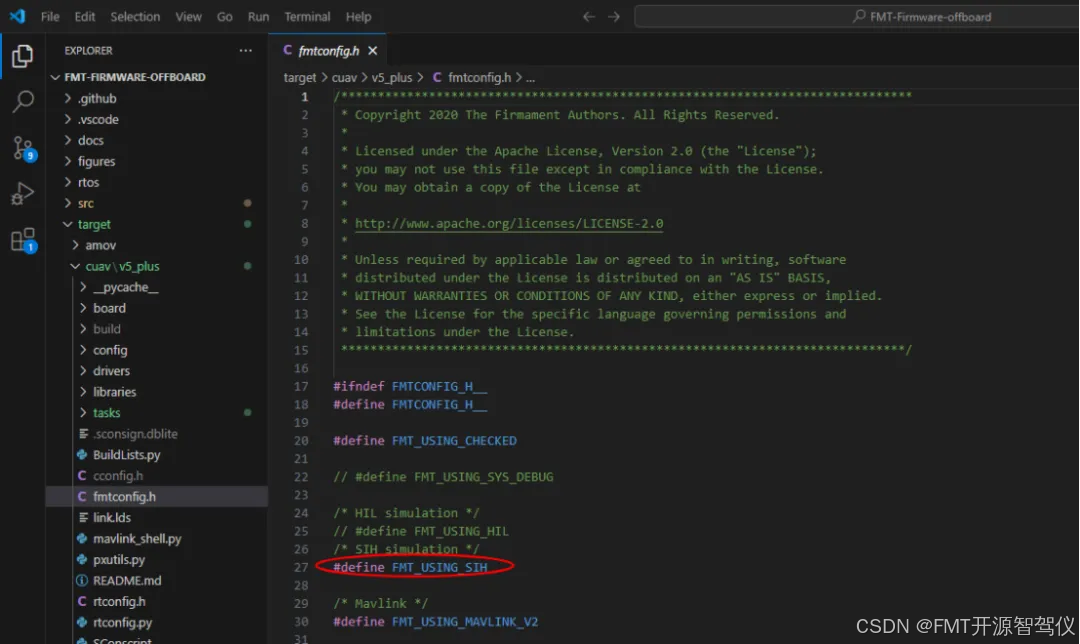
2.进入cuav/v5_plus BSP包,在fmtconfig.h文件中启用FMT的SIH仿真。
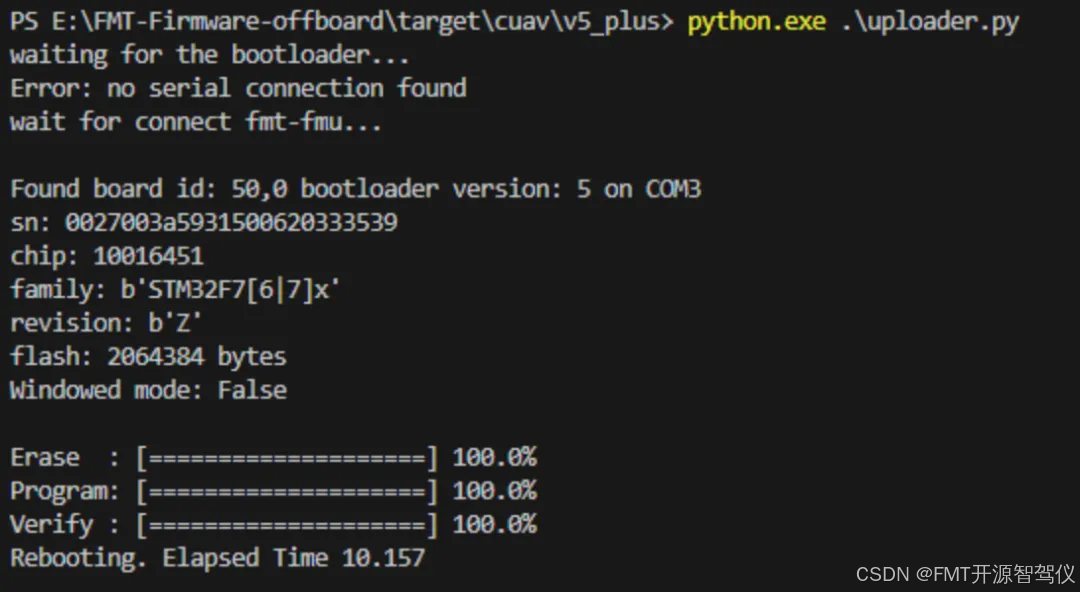
3.打开终端进入v5_plus目录输入scons -j4编译四旋翼固件,

固件编译好后,继续输入python.exe ./uploader.py并连接v5_plus飞控上传编译好的固件。
4.固件上传完成后打开地面站连接飞控。

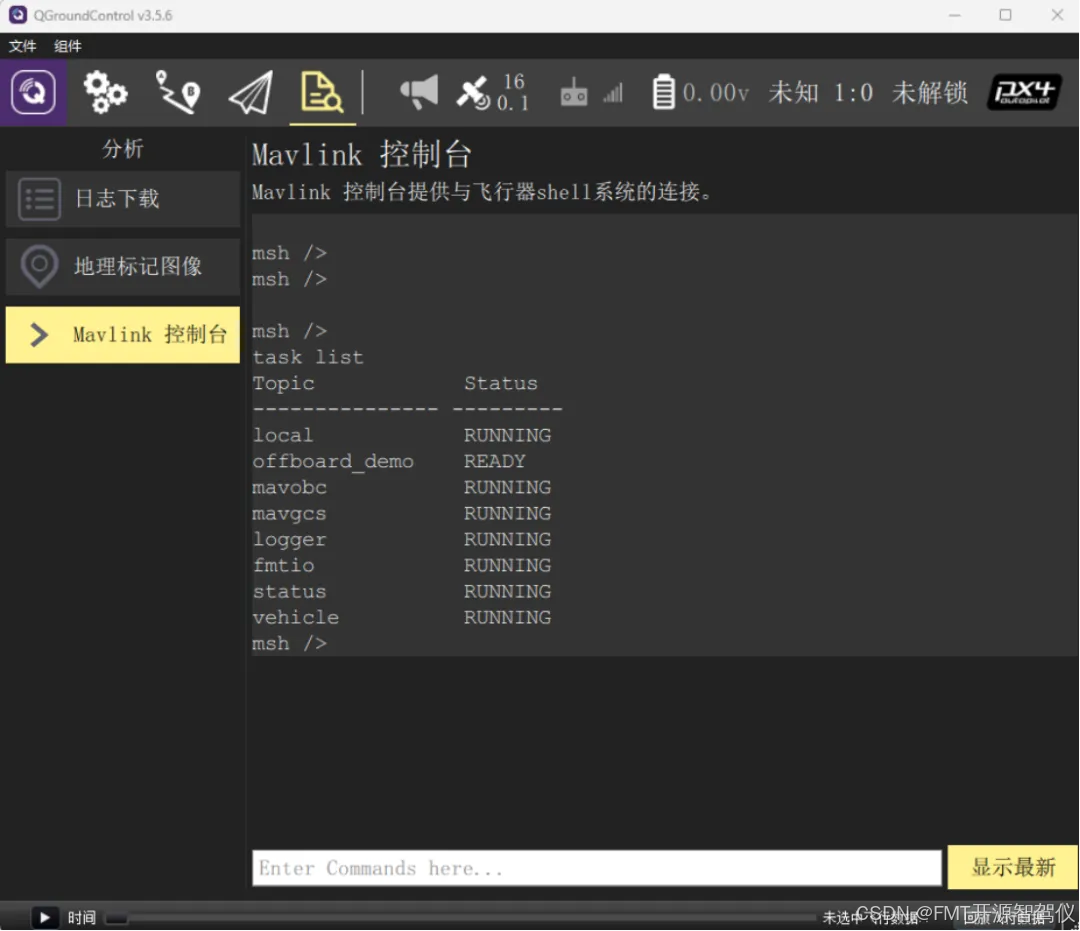
5.打开地面站控制台,输入task list指令,可以看到offboard_demo任务处于READY状态,代表着该任务目前可执行。
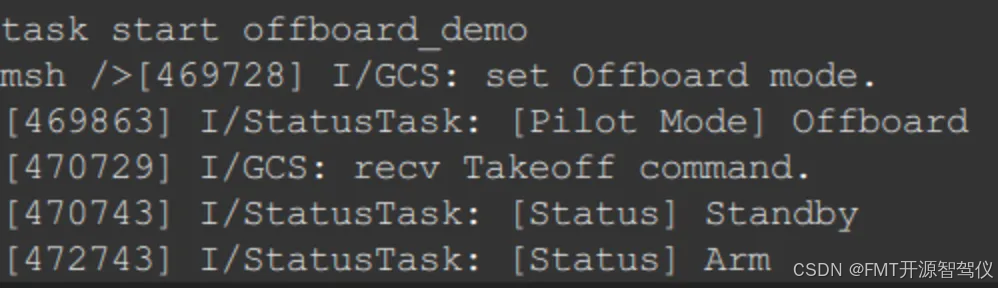
6.在控制台中输入 task start offboard_demo 来启动该任务,任务启动后,会顺序执行,切换offboard模式,起飞指令,起飞完成后,会开始发出auto_cmd指令,控制无人机的行为,最终完整实现Offboard模式的功能。
FMT技术及项目咨询:
FMT飞控系统已支持包括多旋翼,固定翼,垂起固定翼,无人车,无人船,飞艇以及一些异构的无人设备的仿真及真机测试,如果您有无人设备相关项目或产品需求,尤其是飞控系统相关的,欢迎关注”FMT智驾仪“公众号咨询。
“Firmament意为苍穹,希望无人机未来可以自由翱翔于广阔天空。仰望苍穹,也表达了对于未知的探索和科技的敬畏。”
源码地址:
https://github.com/Firmament-Autopilot
文档地址:
https://firmament-autopilot.github.io/FMT-DOCS/

















 1629
1629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









