







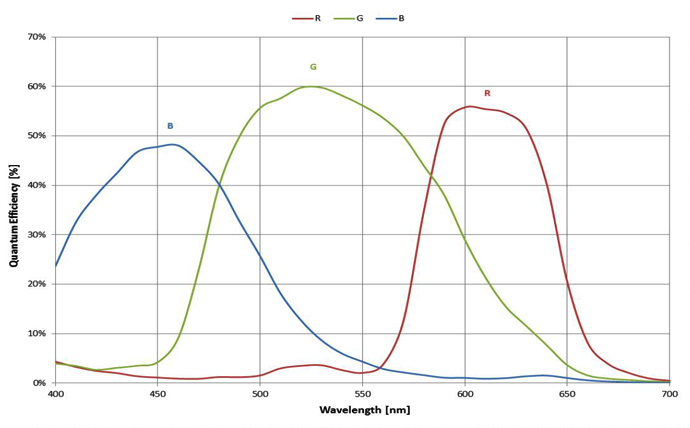
一、工业相机光谱曲线实例
二、说明
光谱曲线是评价工业相机成像适配性的核心指标。核心结论是:优质工业相机的光谱曲线需与应用场景的光源、被测物光谱匹配度高,在目标波段内响应平稳且灵敏度达标,红外 / 紫外等杂光响应低。
- 核心评价维度
匹配度:曲线峰值位置需覆盖被测物的特征光谱波段(如彩色相机需契合 RGB 三通道光谱,荧光检测需匹配激发 / 发射波长)。
响应稳定性:目标波段内曲线无剧烈波动,避免出现局部峰谷导致成像偏色、细节丢失。
灵敏度:目标波段的响应值(纵坐标)需满足场景需求,低光场景需更高响应以减少噪点。
杂光抑制:非目标波段(如红外区)的响应需尽可能低,避免环境光干扰成像精度。 - 关键对比要点
同类型相机对比:在相同目标波段下,响应更高且曲线更平滑的相机更优。
与光源适配:曲线需与光源光谱重叠度高,避免 “光源有输出但相机无响应” 的浪费。
滤光效果验证:带滤光片的相机,需在滤光波段外有明显响应衰减,确保滤光有效性。 - 场景化判断原则
彩色成像:RGB 三通道光谱需分离清晰,无过度重叠,避免色彩还原失真。
机器视觉检测:曲线需覆盖被测物与背景的光谱差异波段,提升对比度。
低光 / 特殊波段成像:目标波段响应需突出,同时抑制杂光以保证成像信噪比。

















 1612
1612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









