







自1995年Knaell为解决曲线SAR成像结果中的强旁瓣问题,将二维计算机断层(Computed Tomography)成像技术扩展到三维空间,并通过投影切片理论和后向投影算法获得了雷达成像三维空间的点响应函数,从而为分析三维成像分辨率和层析成像性能提供了依据。Knaell 的研究为多基线SAR 层析成像的研究提供了初步框架并奠定了理论基础。
1999年,Reigber等人从应用角度证明了SAR层析三维成像的可行性,利用机载E-SAR实验雷达系统对德国Oberpfaffenhofen机场区域进行多次飞行成像试验,通过设计14 条间隔20米的飞行轨迹,获得了基于傅立叶变换的三维成像结果。2004 年,Fornaro等人将层析成像技术扩展到星基平台,利用那不勒斯区域的30个ERS1-2航过数据,实现了多基线星载SAR的三维剖面成像,理论分辨率达到22米。
2009年Budillon等人将压缩感知理论引入到SAR层析成像中,从理论上论证了压缩感知在多基线SAR三维成像中的优势和潜力。随后,2010年提出了SL1MMER重构算法,并实心了TerraSAR-X实测数据的三维成像。
(1)层析SAR信号模型
层析SAR是通过多条高度向基线实现的,高度向基线可通过分时多次航过或同时多个天线实现。多基线空间模型如下图。
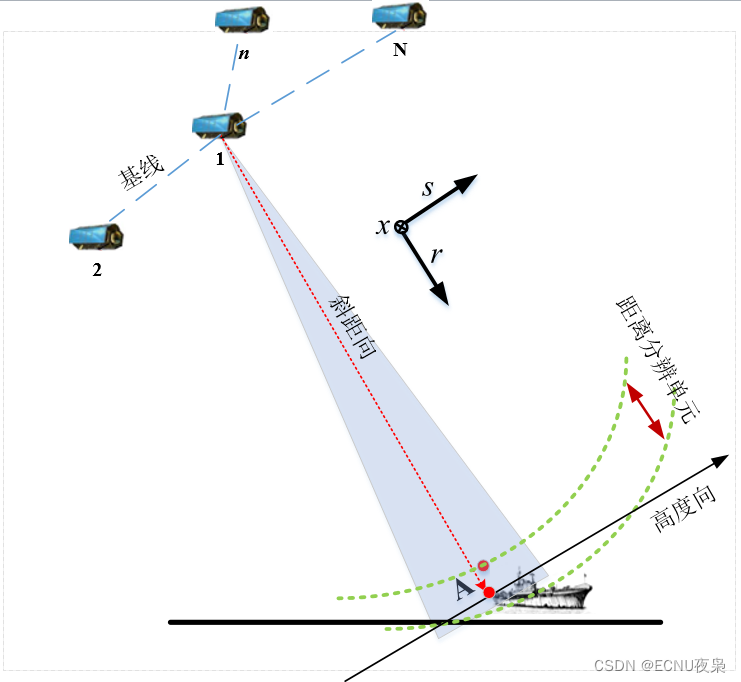
这里所谓的三维是指:距离维、方位维和垂直距离维(LOS).垂直距离维是指途中的s方向,它与地面垂直向有个固定夹角。
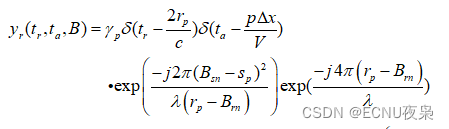
它的多基线回波信号为:
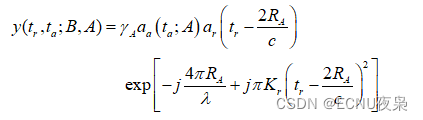
tr和ta分别表示快时间和慢时间;γA为后向散射系数(通常表示为位置函数,由于它对成像分辨率没有影响,这里将其写为常数);aa(·)为方位包络,ar(tr)=rect(tr/T)为距离包络,其中T为脉冲持续时间;λ为发射信号波长;Kr为线性调频率;c表示光速;为雷达到散射点A(rA, xA, sA)的距离,其中rA为斜距向坐标,xA为方位向坐标,sA为高度向坐标。RA的泰勒展开为

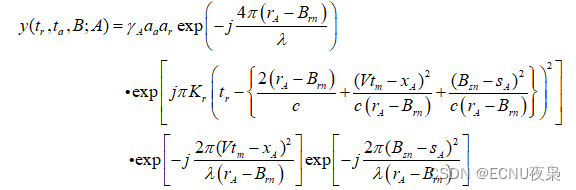
因此,回波信号可写为
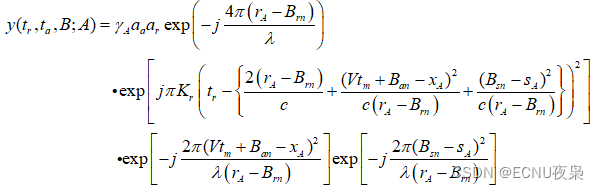
由上式可知,多基线SAR的回波为一个关于快时间、慢时间和三维空间基线的多维信号。在多基线SAR联合信号处理时,采样数据为同一地区的方位维数相同的一段数据,在方位数据对齐时消除方位基线对成像的影响。
(2)压缩感知算法
信号的稀疏化、压缩测量和精确重构是构成压缩感知理论框架的主要部分。压缩感知技术对信号进行重构时,先对高维的稀疏信号进行非相关编码测量,实现采样和压缩两个步骤,然后在恢复信号时利用重构算法同时实现信号的解压与重建,大大降低测量系统的复杂度。
①信号的稀疏化
信号的稀疏表示是为了得到信号更为简洁和直接的表示方式,对于一般自然的信号本身很难保证稀疏性,需要一个正交稀疏基、过完备字典或自适应字典对信号进行稀疏化。即存在一组可以对尺度为N的信号X线性分解。
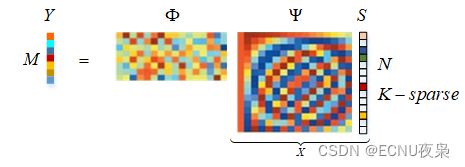
②压缩测量
对信号进行压缩测量的物理意义可以理解为利用M个传感器对N维的原始信号进行观测,得到传感器的测量值Y,采用最优化方法能够从观测值Y中重构出原始信号X。通常,为了得到正确的测量值,需要测量矩阵和稀疏基
互不相关。其中,测量矩阵参与到压缩感知的整个过程,它的选择关系到信号压缩程度和重构精度。对于可压缩信号
,如果有满足下式就说明
具备约束等距条件(Restricted Isometry Property,RIP),那么通过
次采样便可将S的K个最大值精确重构,RIP条件等价于
和
不相关。对于测量矩阵,常见的有高斯矩阵、伯努利矩阵和傅里叶矩阵等。
③精确重构
信号的精确重构是压缩传感理论的灵魂,其算法主要有贪婪算法,如正交匹配追踪算法(OMP);凸松弛算法,如梯度投影算法(GPSR);以及它们的改进算法等。
贪婪算法可描述为一种利用最小二乘不断迭代的算法,效率较高,但是其重构精度和抗噪性能有待提高。
凸松弛算法则是将病态求解范数问题转化为求解范数问题。通过梯度投影法得到S的解。
![]()
利用凸松弛算法求解稀疏性问题,具有较强的鲁棒性。
(3)高度向聚焦
在完成多基线SAR距离和方位聚焦(各个基线的回波二维成像)之后,剩余的空间域信号形式如下
其中,为二维聚焦后的单位冲激函数,
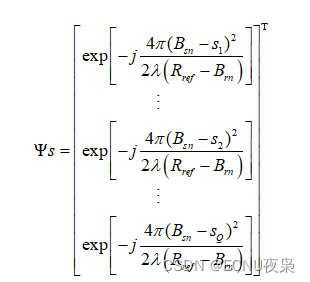
为目标高度位置相关项,高度向基线分量
是实现高度向重构的关键,它决定了重构算法中欠定方程组中方程的个数。根据高度位置相关项,构建高度向稀疏基为:
因此,高度向压缩感知聚焦步骤如下:
第一步:选定最近的距离门信号,构建高度向稀疏基,将式中的用此距离门的的斜距代替;
第二步:遍历此距离门内的各个方位单元,为每一个距离-方位单元的空域信号执行一次压缩感知重构算法;
第三步:将压缩感知重构结果写入相应的距离-方位-高度位置;
第四步:选定下一个距离门,重复第二步和第三步,直到完成全部距离门的遍历操作。
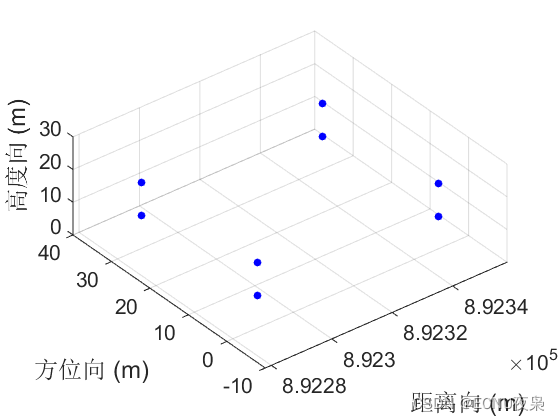
(4)仿真实验
仿真参数如下表所示。
| 参数名称 | 参数数值 |
| 载频 | 5.3 GHz |
| 平台高度 | 800 Km |
| 方位速度 | 7100 m/s |
| 场景中心距 | 890 Km |
| 发射带宽 | 30 MHz |
| 脉冲宽度 | 30 μs |
| 天线孔径 | 10 m |
成像场景:
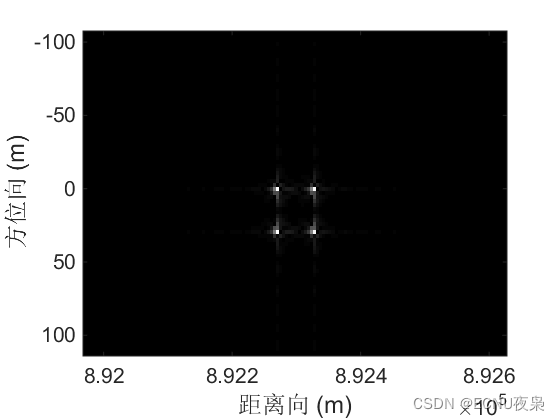
二维成像结果(二维成像算法采用RD算法):
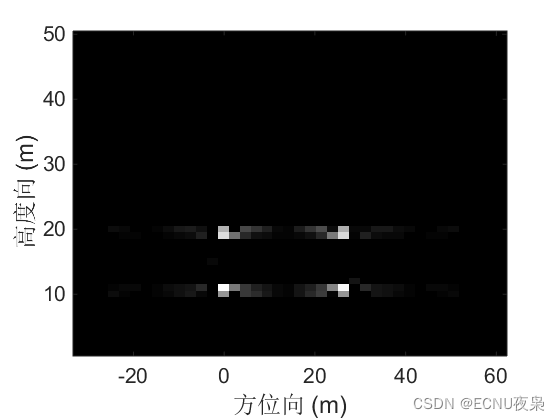
高度向聚焦结果(方位位置为0处的距离向切片):
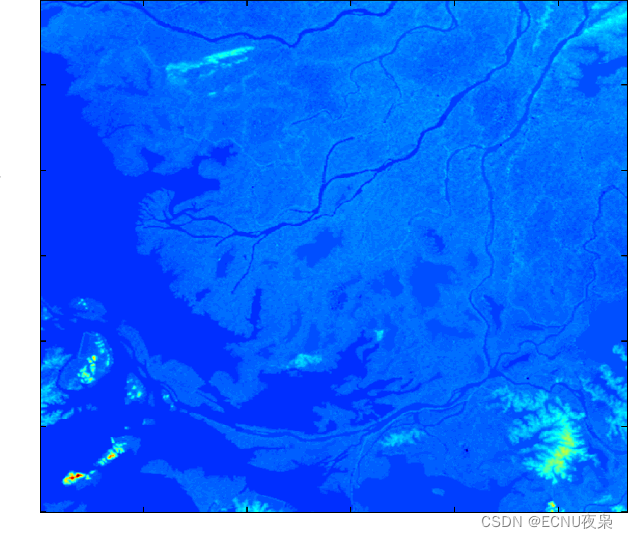
下面是利用层析成像反演某地区的DEM结果。
真实DEM:
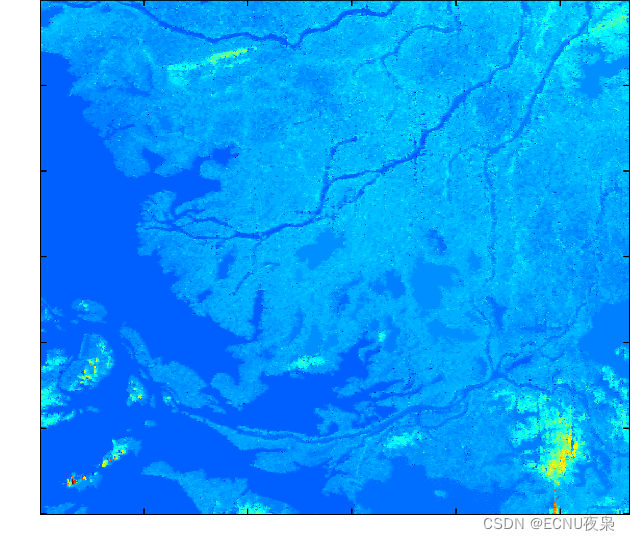
层析反演DEM:

















 3763
3763

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









