







在三大类杂波抑制技术(ATI、DPCA和STAP)中,STAP技术利用杂波与动目标在二维空时谱的差异,以信噪比最优为准则,对地杂波抑制的同时有效保留动目标后向散射能量,有效提高运动目标的检测概率和动目标信号输出信杂比,提供理想的动目标检测效果。在检测出动目标之后,接下来的任务是对剩余杂波和噪声中的动目标精确地估计参数。动目标精确参数估计一般是在方位信号中完成的,对图像中感兴趣的动目标的所在的距离门方位信号估计其Doppler参数或运动参数值。由于Doppler参数或运动参数之间存在固定或近似的转换关系,因此Doppler参数和运动参数在动目标聚焦时的作用是等价的。在GMTI中需要准确知道运动参数,以便描述目标的运动趋势,而在动目标成像时,更加注重动目标的Doppler参数。
在对地面动目标进行运动参数估计时,一般会假设动目标航迹向(方位向)和切航迹向(距离向)的速度在回波积累过程中保持不变,采用各类参数估计方法,估计出Doppler参数,然后根据运动参数和Doppler参数之间的关系,得到GMTI所需的运动信息。
SAR动目标速度精确估计一般是通过多基SAR系统实现的。多基线SAR系统不仅为杂波抑制提供了优越的物理条件,而且系统中的各个雷达接收的动目标信号中Doppler参数是不同的(目标自身的运动信息对各雷达是不变的),因此多基线更加有利于实现信号联合处理,提高运动参数估计性能。
1、多基线SAR的动目标成像几何构型
下图 为星载多基线SAR的动目标成像几何。在低轨星载条件下,卫星的有效速度在7100m/s左右,(这里的有效速度指的是引起方位信号多普勒变化的速度,通常卫星的速度比有效速度大6%,而地面波束速度比有效速度小6%),合成孔径时间为0.6秒左右,因此在雷达照射动目标时间内,卫星走过的弧度与照射场景的弧度偏差基本忽略,星座的运行可近似为与地面场景平行。假设星载多基线SAR系统中有3个天线。x–y–z轴分别代表沿航向、地距向和垂直高度向,即大地坐标系左手系。星载多基线SAR系统沿x方向以速度Va飞行,系统高度为H,雷达发射LFM信号。动目标行驶在地面上,(Vx,Vy,Vz)为动目标速度矢量在x–y–z坐标系下的三个分量。运动目标在慢时间tm=0时位于(x0,y0,z0)的位置。
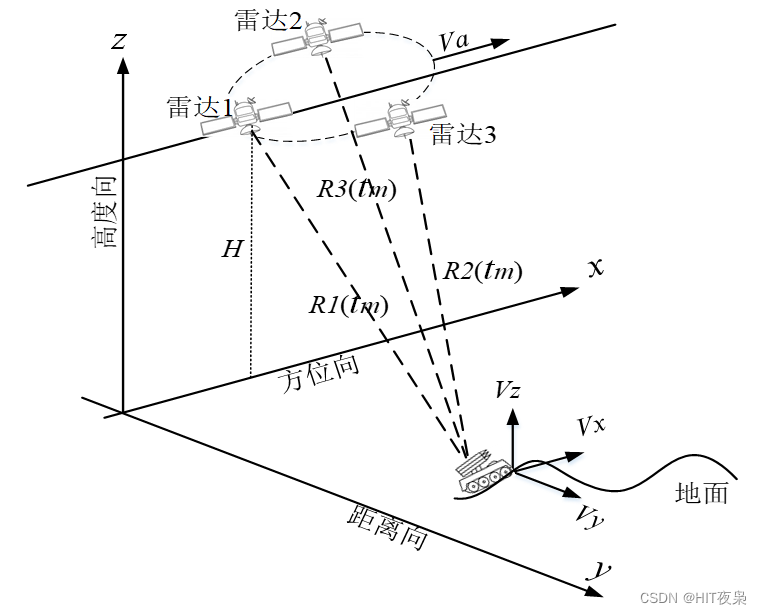
2、多基线SAR动目标回波信号模型
星载多基线SAR系统可用于一发多收(主从模式)和多发多收(非主从模式)两种体制,前者由一颗主卫星和多个伴飞小卫星构成,主星自发自收微波信号,伴飞小卫星只能接收主星发射的信号,在这种体制下,主星的性能要求比较稳定,伴飞小卫星制造成本较小,但是成像范围较小;后一种模式下,各卫星在收发信号方面比较独立,功能一致。无论对那种信号接收体制都涉及到天线协同工作的“三大同步”问题,即时间同步(发射机和接收机工作时间保持同步)、相位同步(在成像的想干积累过程中保持各个天线之间的相干性)和空间同步(也叫波束同步,卫星上的各个天线必须同时照射同一区域)。“三大同步”问题涉及到系统天线设计,信号设计和天线指向调节等内容,这里不做讨论。由于自发自收体制中,各个卫星配置更加灵活,能够实现单独或协同工作模式的快速切换,有利于宽测绘成像,因此下面以自发自收体制为基础研究星载多基线SAR动目标三维速度估计问题。
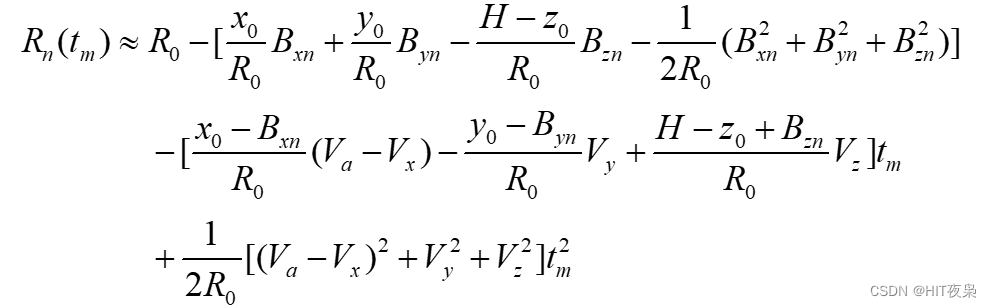
根据上图,动目标在星载多基线SAR第n个天线照射期间的距离历程可表示为

其中,(Bxn,Byn,Bzn)为第n个天线的三维空间基线。上式在星载多基线SAR系统最短斜距R0处关于tm的二阶泰勒展开形式写为
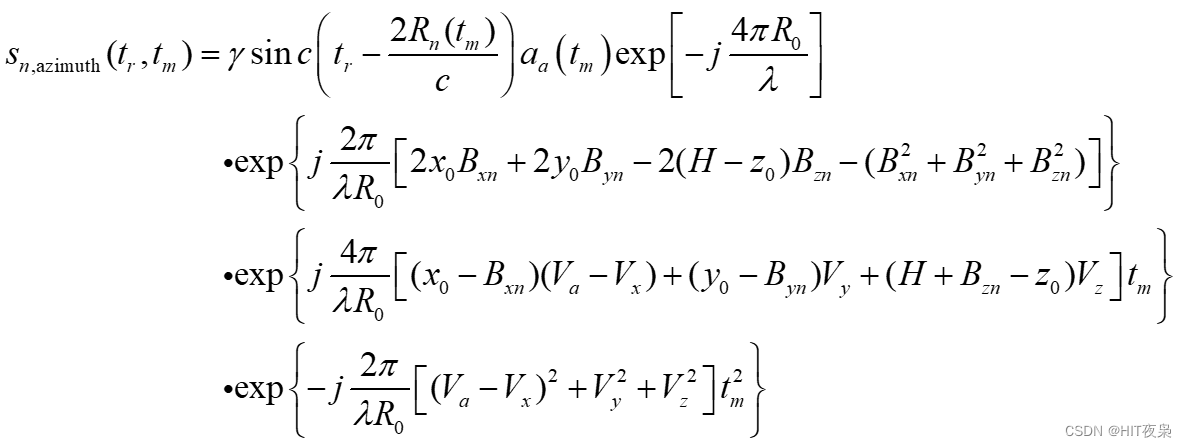
由于雷达发射LFM信号,所以第n个天线接收到地面的回波,经检波及解调后得到复基带信号可表示为

其中,tr为距离快时间,ar(tr)和aa(tm)分别为距离和方位包络函数,为后向散射系数,上式经过匹配滤波完成距离压缩操作后的表达式可写为

对于不同的目标运动形式,上式有不同的表达形式,在这里动目标方位信号的相位可以统一表示为关于tm的q阶多项式形式,即把方位信号看成是PPS。
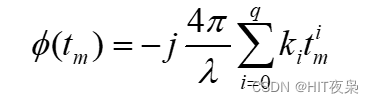
其中,q为展开的多项式总阶数,ki为第i阶多项式相位系数。因此,可得方位信号为二阶PPS
为方便分析,只关心目标方位信号中包含运动信息的相位项。因此方位PPS的相位可写为
这里,

由于二阶PPS为LFM信号,因此Doppler中心频率和Doppler调频率分别写为
在星载SAR-GMTI时,以下两个假设总是成立的:①对于地面或海面目标,其在各个方向的速度分量远远小于卫星的运行速度;②目标的垂直高度远远小于卫星的运行高度。基于以上两个假设,动目标方位信号的Doppler中心频率和Doppler调频率具有以下近似形式
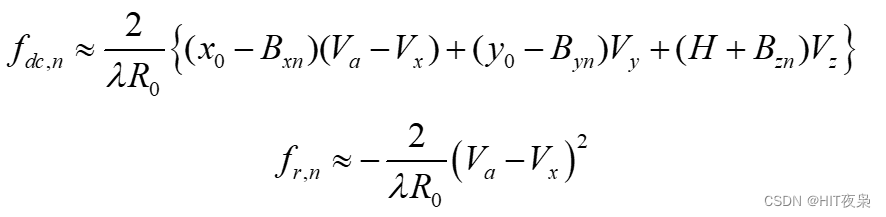
由上式看到,Doppler调频率仅与Vx(方位向速度)这一个未知参数有关,因此通过单个天线就可估计得到方位速度,至于Doppler中心是由距离向速度Vy与Vx的耦合关系构成。
3、多普勒参数估计与速度求解
由上节分析可知,在星载多基线SAR中的动目标方位信号为二阶PPS,即一个LFM信号。对LFM信号进行参数估计普遍采用时频分析技术,其中以Wigner-Ville分布(Wigner-Ville Distribution, WVD)最具代表性。虽然,WVD对LFM信号具有良好的时频聚集性;然而,其非线性变换特征使它难于处理同一距离门内存在多个运动目标的情况。随后,WVD与Radon变换、CLEAN等相结合的算法,以及演进的Cohen类算法,对LFM信号的参数估计从单个目标发展到多个目标;然而,这些算法为了抑制多目标交叉项牺牲了时频谱的分辨率,导致参数估计的精度降低。
分数阶傅里叶变换(Fractional Fourier Transform, FrFT),作为一种线性时频变换算法,它对LFM信号具有非常好的时频聚集性,且不存在交叉项的问题,对于SAR多目标的运动参数估计具有广阔的应用前景。
由前文分析可知,动目标的方位信号为LFM信号,而FrFT对于LFM具有很好的时频聚集性,能够使线性调频信号在某分数阶域实现能量聚集;其次,在同一距离门内存在多个动目标的情况,其回波方位信号表现为多分量LFM信号,在对方位信号进行FrFT操作时,信号调频率不同(即方位速度不同)的分量会在不同的分数阶傅里叶域聚焦,可以有效地区分出不同方位速度的动目标;最后,由于FrFT是线性变换,在对信号进行FrFT操作时,能够有效地在加性噪声中滤出有用信号,算法的鲁棒性高。
在使用FrFT估计得到信号的多普勒中心和多普勒调频率后,可以首先计算目标的方位向速度
然后,将方位速度带入多普勒中心的表达式,可推导除距离向速度的计算公式

当然,需要提高二维速度的估计精度,还可以使用多极限条件对估计结果进行进一步优化。

















 1067
1067

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









