







大家好,这里是“电动札记”,一个坚持原创的新能源汽车知识共享与热点分析平台。很高兴再次见面!
在上期电池管理系统(BMS)系列—状态估计(一)之SOC中,我们介绍了在实际应用中估计SOC时常使用开路电压法+安时积分法的组合,但存在受初值影响大、误差随时间累积等缺点。于是基于拓展卡尔曼滤波(EKF)进行SOC估计的方法逐渐进入大众视野,本文将针对该方法进行介绍。
要想了解“基于拓展卡尔曼滤波(EKF)进行SOC估计”的方法,其中有两个绕不开的知识点。一个是“动力电池模型”,一个是“拓展卡尔曼滤波算法原理”。说实话,这俩不论哪一个单拎出来,想要完全搞透都不是件简单事,其中伴随着各种眼花缭乱的公式推导、矩阵变换,很容易让人从“准备开始”到“光速放弃”。所以小编不打算在本文呈现那些纷繁复杂的公式,而只“浮于表面”,讲解脉络,以期读者对“基于拓展卡尔曼滤波(EKF)进行SOC估计”的方法有个基本认知。
首先来看第一个知识点“动力电池模型”。
当前对动力电池进行建模的模型主要有等效电路模型、电化学模型、分数阶模型等。它们虽然建模原理不同,但起到的作用是类似的。此处以一阶等效电路模型(Thevenin模型)为例进行介绍。
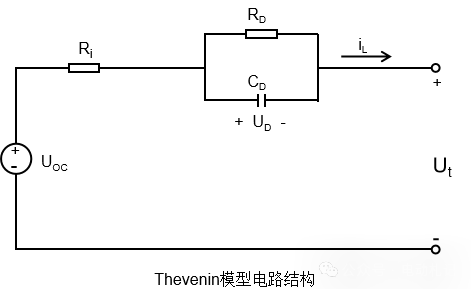
该模型描述了动力电池的外特性,各部分组件含义如下:
(1)电压源:使用UOC表示动力电池的开路电压。
(2)欧姆内阻:使用Ri表示动力电池电极材料、电解液、隔膜电阻及各部分零件的接触电阻。
(3)RC网络:通过极化内阻RD和极化电容CD来描述动力电池的动态特性,包括极化特性和扩散效应等。
Ri,RD和CD为模型参数,可通过某些方法辨识得到。iL为电池充入/输出电流。模型对外输出电压Ut叫端电压,是可以直接采集到的电压值。UD为RC并联环节的电压降,用于模拟动力电池的极化电压。UOC表示动力电池的开路电压。
/**复习一下:还记得我们在上期文章中提到的开路电压法估计SOC吗?开路电压UOC与SOC间往往存在一一对应的关系(OCV曲线)。当电池经过充分静置平衡时,可近似认为端电压Ut值与开路电压UOC值相等,读取端电压值即可查表得到SOC。当电池内部状态不平衡时,端电压Ut值与开路电压UOC值不相等,开路电压法也就不适用了。**/
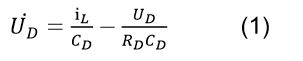
通过该模型,可以输出两个方程式,在后面还会用到。方程(1)描述了极化电压UD和电池电流iL间的关系。方程(2)描述了端电压Ut、极化电压UD、开路电压UOC和电流iL之间的关系。

这是对于一阶等效电路模型输出的两个方程式。对于其它电池模型输出的方程式个数、形式会有所不同,但一般都会有描述端电压、开路电压和电流间关系的相关方程。
有了电池模型的方程式输出,现在我们可以来看第二个知识点“拓展卡尔曼滤波算法(EKF)原理”和其在电池SOC估计中是如何应用的了。
EKF的基本思想是通过融合系统的先验估计与测量值,得到对系统状态的最优估计。在这句话中,有三个关键词:“先验估计”,“测量”和“融合”。当“先验估计”中的“状态方程”和“测量”中的“量测方程”确定后,可以得到最优估计值的“融合”过程也就基本确定了。所以若想使用EKF,关键是确定状态方程与量测方程。
下面我们来看在EKF中对应的状态方程和量测方程是怎样的,以及在使用Thevenin模型预估SOC时对应的具体方程。或者可以直接转到文末总结,略过此部分。
—————————————我是分界线————————————
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
先验估计与状态方程

式中,下标k表示当前时刻,k-1表示上一时刻;x为n维状态向量;u为r维系统输入变量。
Wk-1为过程噪声,算法中与其相关的值常做常量处理。
基于Thevenin模型的EKF预估SOC中:
x为二维状态向量,由我们想要预估的变量构成,由电池极化电压UD和电池SOC构成。(ps:实际上我们只需要预估电池SOC就行了。但对Thevenin模型,为保证EKF算法的进行,此处带上极化电压UD也是必需的)。
u为一维系统输入变量,此处为动力电池电流iL。
对应电池极化电压UD和电池SOC两个预估变量,先验估计过程包含两个预估方程。一个用于描述极化电压UD和输入电流iL间的关系,由前文提到的方程1变形得来;一个用于描述电池SOC和输入电流iL间的关系,由安时积分法得到(所以本质上EKF预估SOC就是安时积分法的改进)。接着可将两个方程合并写成方程3状态方程的矩阵形式。
测量与量测方程

式中,y为m维系统输出向量(或观测值);Vk-1为测量噪声,算法中与其相关的值常做常量处理。
基于Thevenin模型的EKF预估SOC中:
y为测量的端电压Ut值,可将前文提到的方程2作为量测方程使用。
实际上在这部分会有两个端电压值输出,一个是实际采样得到的端电压值,一个是根据量测方程计算得到的端电压值,两者之间的差异就是影响后续融合更新方程,计算状态向量x新预估值的部分因素。
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
—————————————我是分界线————————————
综上,对基于Thevenin模型的EKF估计SOC,暂且这样描述。1. 先验估计:通过电池模型得到的某些状态方程先计算一个变量A(极化电压UD)和变量B(SOC)的预估值(先验估计值);2. 测量比较:测量变量C(端电压)的实际值,同时计算根据量测方程应该得到的变量C值,两者的比较结果可作为融合的部分考量因素(注意此处要求变量C必须是与变量A和变量B之间存在方程式关系的变量,否则融合也就没有意义了);3.融合更新:借助一些方程,将测量过程的比较结果与先验估计的预估值组合,得到A和B(SOC)最新的预估值(后验估计值),至此SOC便确定了。重复以上过程持续计算。
那么本期就到这里,对SOC估计的相关内容也基本介绍完成了。
下期我们将会开始新的篇章——动力电池SOH的估计。欢迎感兴趣的小伙伴持续关注。
写在文后:本文为求简洁,省略了很多过程细节,对EKF算法的各部分也都做了简化,删掉了包括初值赋予、矩阵变换、融合更新等很多内容,难免会有描述不当之处。敬请包涵。如果大家对某一部分存有疑问,或者想要详细了解EKF算法及其对应的SOC估计时的话,欢迎后台留言、点赞、收藏,小编会酌情考虑是否开期新的文章。
这里是“电动札记”,我们下期再见~
















 552
552











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











