






文章目录
一.概要
MPU6050就是一种非常重要的传感器,被广泛应用于无人机、机器人、智能手机、平板电脑、可穿戴设备等领域。
MPU6050是一款功能强大的六轴运动跟踪传感器,适用于各类物体加速度与角速度的精确测量。
集成了三轴加速度计与三轴陀螺仪,并通过I2C接口与微控制器实现通信。在使用MPU6050之前,需进行一系列预处理步骤,包括初始化配置、校准操作及数据滤波等。
平衡车和无人机在内部都用到陀螺仪传感器和加速度计传感器,用来检测车体的姿态以及运动时发生的变化,再通过各方面的共同协调配合,从而保持平衡车和无人机的平衡与稳定。
二.MPU6050芯片介绍
1.MEMS传感器原理
MEMS加速度传感器通常由质量块、弹簧和电容等组件构成。当物体受到加速度作用时,质量块会受到力的作用而发生位移,而弹簧会受到拉伸或压缩。这些位移和变形将导致电容的改变,从而通过电容变化来测量加速度。


2.MPU6050芯片简介
MPU-6050是全球首例6轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(DigitalMotionProcessor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-6050也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。
MPU-6050对陀螺仪和加速度计分别用了三个16位的ADC(0~65535),将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。
芯片尺寸4×4×0.9mm,采用QFN封装(无引线方形封装),可承受最大10000g的冲击,并有可编程的低通滤波器。
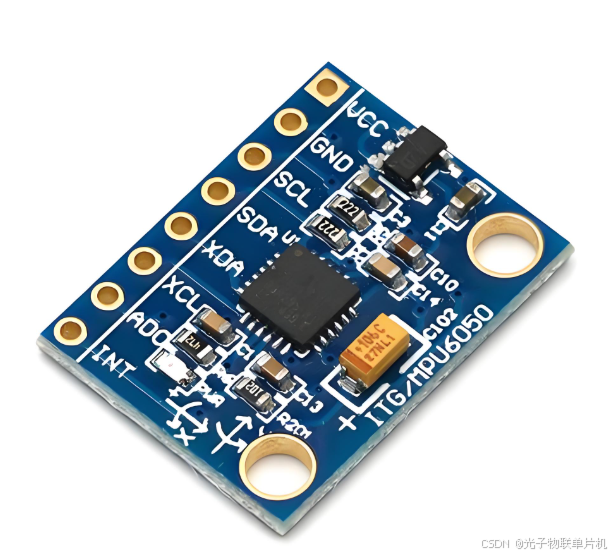
3.芯片引脚定义

4.XYZ轴方向
三轴加速度计主要用于测量物体在三个空间维度(X,Y,Z三轴)上的加速度。它们可以检测物体在静止或运动状态下的加速度,包括重力加速度和线性加速度。通过测量感应质量的移动距离和方向,可以确定物体的加速度。有了加速度采样的数据,就可以应用到碰撞检测,设备或桥梁倾斜角度,机器振动检测,走路计步等场合。
三轴陀螺仪则主要用于测量物体在三个空间维度上的角速度,即Roll(左右倾斜)、Pitch(前后倾斜)、Yaw(左右摇摆)。它们可以检测物体的方向和姿态变化,对于维持设备的稳定性和实现某些功能(如自动旋转屏幕)至关重要。有了陀螺仪采样的数据,就可以应用到飞机航姿参考系统,及无人机惯性导航,人体运动姿势检测等场合。

Roll(左右倾斜)、Pitch(前后倾斜)、Yaw(左右摇摆)示意图如下:

5.芯片内部框图

6.芯片常用寄存器
1.WHO_AM_I寄存器
此寄存器用于验证设备的身份。默认读出为0x68,如果读出是0x68,说明单片机跟MPU6050通讯成功。

2.加速度数据
从上到下分别为X轴高八位陀加速度值、x轴低八位加速度值、Y轴高八位加速度值…由于其地址也为连续的,我们只需调取连续读函数读0x3B读取6次就可以了

3.陀螺仪数据
从上到下分别为X轴高八位陀螺仪值、x轴低八位陀螺仪值、Y轴高八位陀螺仪值,由于其地址为连续的,我们只需调取连续读函数读0x43读取6次就可以了。

从寄存器读上来的数据是原始值,真正的加速度,角速度值需要跟量程挂钩,所以还需加个转换,加(角)速度值真实值 = 原始数据 / 灵敏度,如果量程寄存器不配置,默认加速度量程是±2g,默认陀螺仪量程±250度/秒。
加速度数据灵敏度表格

陀螺仪数据灵敏度表格

三.MPU6050模块原理图及与模块接口定义使用

模块接口定义:
SCL:IIC从时钟信号线SCL,模块需要外接上拉电阻,一般为4.7K
SDA:IIC从时钟信号线SDA,模块需要外接上拉电阻,一般为4.7K
INT:中断输出引脚,可以不接
XCL:IIC主串行数据信号线,用于外接传感器,一般不接
XDA:IIC主串行时钟信号线,用于外接传感器,一般不接
VCC_5V:3.3/5V电源输入
AD0:从IIC接口的地址控制引脚,该引脚控制IIC地址的最低位。默认是悬空就可以,MPU6050的IIC地址是:0x68,所以一般不需要接。真正单片机去读的时候,还需要在最低位加上读写位,这样IIC地址在写的时候就是0xD0,读的时候就是0xD1。
GND:地信号。
所以单片机跟MPU6050模块连接,只要接IIC的两个脚还有电源,地就可以了,总共4根线就可以通信使用了。
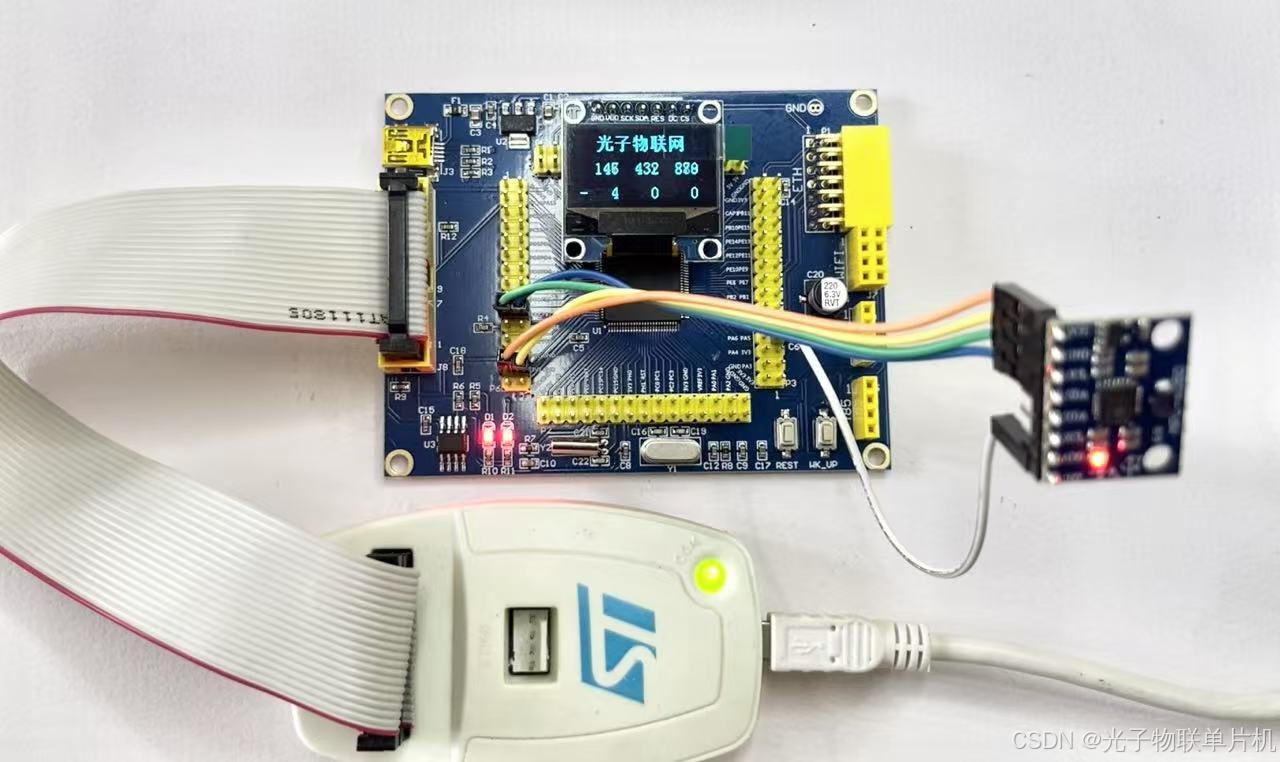
四.GD32F407VET6单片机驱动MPU6050读取加速度角速度值和中断检测实验
板子与MPU6050陀螺仪模块用杜邦线连接:
板子G-----模块GND
板子3.3—模块VCC
板子PB6—模块SCL
板子PB7—模块SDA
板子PA5—模块INT

添加代码
主要程序:
#include "gd32f4xx.h"
#include "gd32f4xx_libopt.h"
#include "systick.h"
#include "oled.h"
#define I2C1_SLAVE_ADDRESS7 0x46
void i2c_config(void)
{
/* configure I2C1 clock */
i2c_clock_config(I2C0, 100000, I2C_DTCY_2);
/* configure I2C1 address */
i2c_mode_addr_config(I2C0, I2C_I2CMODE_ENABLE, I2C_ADDFORMAT_7BITS, I2C1_SLAVE_ADDRESS7);
/* enable I2C1 */
i2c_enable(I2C0);
/* enable acknowledge */
i2c_ack_config(I2C0, I2C_ACK_ENABLE);
}
short Accel[3];
short Gyro [3];
short Temp;
long AccelData[3];//单位mg
long GyroData[3];//单位mdps
uint8_t IntFlag;//MPU6050中断标志
uint8_t CleanTime,LedFlag=0;
int main(void)
{
int i;
systick_config();//配置系统主频168M,外部8M晶振,配置在#define __SYSTEM_CLOCK_168M_PLL_8M_HXTAL (uint32_t)(168000000)
rcu_periph_clock_enable(RCU_GPIOB);//使能GPIOB时钟
gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_4);//PB4配置成输出
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_4);//PB4配置成推挽输出,50M速度
gpio_af_set(GPIOB, GPIO_AF_4, GPIO_PIN_6);//复用功能4
gpio_af_set(GPIOB, GPIO_AF_4, GPIO_PIN_7);//复用功能4
gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_6);//PB6,PB7配置成I2C
gpio_output_options_set(GPIOB, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,GPIO_PIN_6);
gpio_mode_set(GPIOB, GPIO_MODE_AF, GPIO_PUPD_PULLUP,GPIO_PIN_7);
gpio_output_options_set(GPIOB, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,GPIO_PIN_7);
OLED_Init();//OLED初始化
OLED_Clear();//OLED清屏
rcu_periph_clock_enable(RCU_I2C0);//I2C0时钟使能
i2c_config();
//外部中断配置//
rcu_periph_clock_enable(RCU_GPIOA);
gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_PULLDOWN, GPIO_PIN_5);//PA5配置成下拉输入
nvic_irq_enable(EXTI5_9_IRQn, 2U, 0U);//中断使能
/* configure key EXTI line */
exti_init(EXTI_5, EXTI_INTERRUPT, EXTI_TRIG_RISING);//上升沿触发
exti_interrupt_flag_clear(EXTI_5);
delay_1ms(180);//等待180ms
MPU6050_Init();//MPU6050初始化配置,中断使能配置
if(MPU6050ReadID() == 0)//读取MPU6050 ID
{
while(1);
}
while(1)
{
CleanTime++;
if(CleanTime>=20)
{
CleanTime=0;
OLED_Clear();//清屏
if(IntFlag)
{
LedFlag^=0x01;
if(LedFlag)
{
gpio_bit_set(GPIOB, GPIO_PIN_4);//PB4输出高电平
}else
{
gpio_bit_reset(GPIOB, GPIO_PIN_4);//PB4输出低电平
}
}
}
OLED_ShowCHinese(18,0,0);//光
OLED_ShowCHinese(36,0,1);//子
OLED_ShowCHinese(54,0,2);//物
OLED_ShowCHinese(72,0,3);//联
OLED_ShowCHinese(90,0,4);//网
MPU6050ReadAcc(Accel);//读取加速度数据
for(i=0;i<3;i++)
{
if(Accel[i]>=0)
{
AccelData[i]=Accel[i]*2000/32768;//转换成单位mg
}else
{
AccelData[i]=-(-Accel[i]+1)*2000/32768;
}
}
if(AccelData[0]<0)//判断是否为负数
{
OLED_ShowString(0,3,"-");
OLED_ShowNum(8,3,-AccelData[0],4,16);//加速度x
}else
{
OLED_ShowNum(8,3,AccelData[0],4,16);//加速度x
}
if(AccelData[1]<0)//判断是否为负数
{
OLED_ShowString(40,3,"-");
OLED_ShowNum(48,3,-AccelData[1],4,16);//加速度y
}else
{
OLED_ShowNum(48,3,AccelData[1],4,16);//加速度y
}
if(AccelData[2]<0)//判断是否为负数
{
OLED_ShowString(80,3,"-");
OLED_ShowNum(88,3,-AccelData[2],4,16);//加速度z
}else
{
OLED_ShowNum(88,3,AccelData[2],4,16);//加速度z
}
MPU6050ReadGyro(Gyro);//读取陀螺仪数据
for( i=0;i<3;i++)
{
if(Gyro[i]>=0)
{
GyroData[i]=Gyro[i]*2000/32768;//转换成单位mdps
}else
{
GyroData[i]=-(-Gyro[i]+1)*2000/32768;
}
}
if(GyroData[0]<0)//判断是否为负数
{
OLED_ShowString(0,6,"-");
OLED_ShowNum(8,6,-GyroData[0],4,16);//陀螺仪x轴
}else
{
OLED_ShowNum(8,6,GyroData[0],4,16);//陀螺仪x轴
}
if(GyroData[1]<0)//判断是否为负数
{
OLED_ShowString(40,6,"-");
OLED_ShowNum(48,6,-GyroData[1],4,16);//陀螺仪y轴
}else
{
OLED_ShowNum(48,6,GyroData[1],4,16);//陀螺仪y轴
}
if(GyroData[2]<0)//判断是否为负数
{
OLED_ShowString(80,6,"-");
OLED_ShowNum(88,6,-GyroData[2],4,16);//陀螺仪z轴
}else
{
OLED_ShowNum(88,6,GyroData[2],4,16);//陀螺仪z轴
}
}
}
extern uint8_t IntFlag;
void EXTI5_9_IRQHandler(void)//外部中断检测,检测到外部中断
{
exti_interrupt_flag_clear(EXTI_5);
IntFlag=1;
}
void Motion_Interrupt(void) //运动中断
{
MPU6050_WriteReg(MPU6050_RA_MOT_THR,30); //运动阈值,如果要增加灵敏度,可以把值改到10以下
MPU6050_WriteReg(MPU6050_RA_MOT_DUR,0x14); //检测时间20ms 单位1ms
}
实验结果:
板子程序跑起来后,液晶上能显示陀螺仪数据,第1行三个数分别代表X,Y,Z轴的加速度值,单位mg。第2行代表X,Y,Z轴的角速度值。
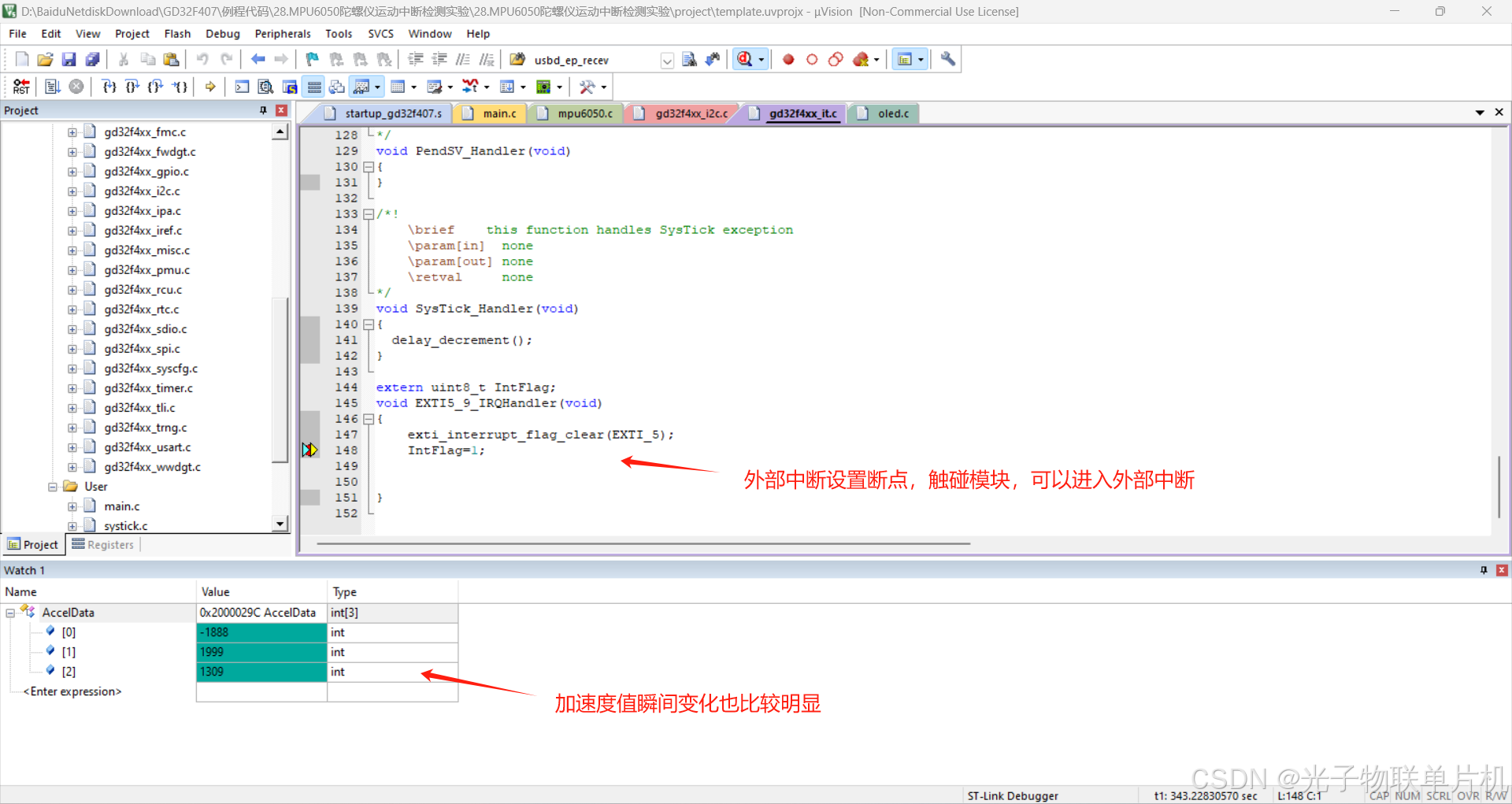
用手触碰陀螺仪,LED会闪烁,说明陀螺仪产生中断,震动报警了。软件外部中断处设置断点,可以进入断点,说明MPU6050产生了运动中断输出信号。
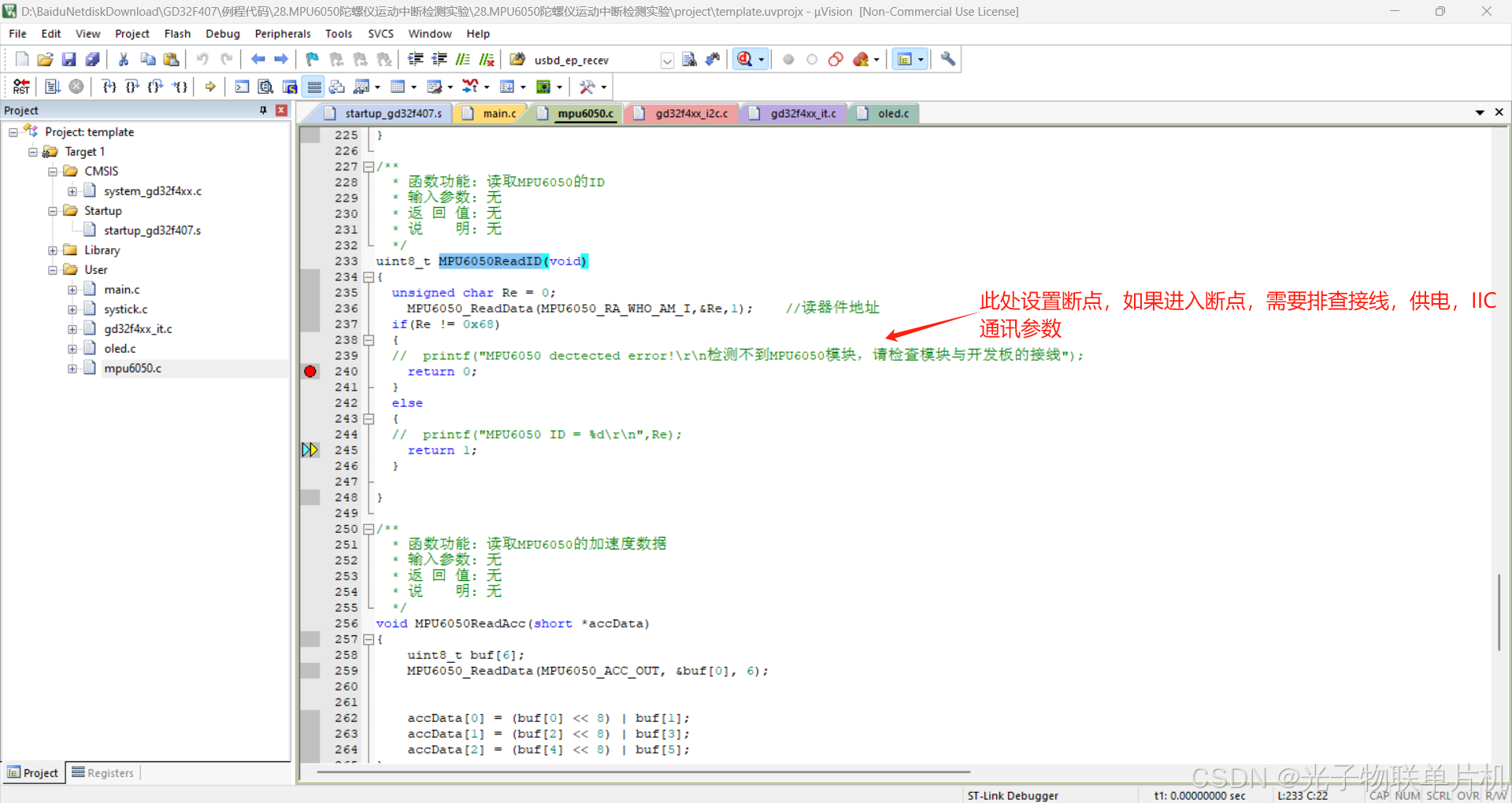
如果遇到MPU6050数据读取不到,可以在下图中显示的地方设置断点,用于排查接线,供电,IIC通讯参数。
五.工程源代码下载
源代码下载链接如下:
CSDN
六.小结
学会GD32单片机驱动MPU6050,在无人机、机器人、智能手机、平板电脑、可穿戴设备等应用6轴陀螺仪的场合就会得心应手。

















 1833
1833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









