







多年来,我们研究了自然控制的各个方面,然而,单个方面的研究成果尚未被整合。在这里,我们提出了一个全面的在线研究中该框架的第一个实现,结合(i)目标定向运动意图、(ii)轨迹解码和(iii)在一个独特的闭环控制范式中的error处理。测试包括12名身体健全的志愿者,进行尝试的动作,和一名脊髓受伤参与者。我们揭示了与之前的研究结果相似的与运动相关的皮层电位和误差电位,并全面重建了所尝试的运动轨迹。源分析认为感觉运动和后顶叶区参与目标定向运动意图和轨迹解码。这项研究有助于理解自然运动控制,为有运动障碍的个体提供更直观的策略提供见解。
实验范式
所有的参与者,无论是身体健全的还是终端用户,都舒适地坐在一个灯光昏暗的房间里,距离一个48.5英寸的屏幕约1米。屏幕上显示实验范式,显示了被控制的光标和其他movlook对象(图1a、c)。身体健全的参与者坐在一张普通的椅子上,右臂安全地绑在扶手上,右手放在一个小球上,以获得额外的舒适感(图1a)。相比之下,脊髓损伤的参与者坐在他的日常轮椅上,手臂自由地放在扶手上。
实验在概念上分为两个阶段,我们将其命名为校准和在线反馈(图1b)。实现并利用了树解码模型,或检测目标定向运动意图(i),解码尝试的手/手臂运动轨迹(ii),或检测error处理的神经关联(iii)。这些模型的细节将在“解码模型”一节中给出。在实验的校准阶段(图1b),收集了对每个参与者进行校准和定制解码模型所需的必要数据。在在线反馈阶段,三种模型都对信号进行连续处理,实现闭环控制。校准和在线反馈阶段都被运行,如图1b所示。两种实验条件,即“movlook”和“only look”。另外两个块,称为“眼块”,用来收集休息数据、眼跳运动和眨眼,以建立回归模型来减弱眼动伪影和听觉模型来减弱跳跃。
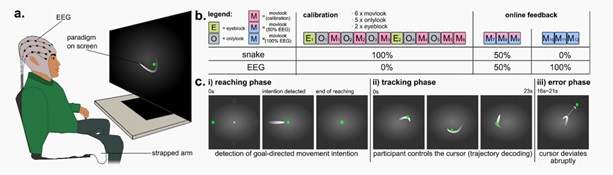
图1 实验设置和范式
在“only look”的情况下,参与者被要求只专注于观察屏幕和光标的movlook。相比之下,在“movlook”条件下,参与者被要求既观察光标,又尝试与右臂一致的动作。“movlook”和“only look”两种条件被进一步分为试验,每一种都有不同的持续时间和结构。在试验中可以出现分离阶段,分别命名为“reaching”、“tracking”和“error”(图1c)。在“movlook”条件下,试验从“reaching”阶段开始,继续到“tracking”阶段,而“error”阶段只发生在选定的试验中。在“only look”的条件下,试验只包含“reaching”阶段;在开始下一次试验之前,先向外插入2-3秒的休息。
目标导向的运动意图
对于目标导向的运动意图部分,由于录音中的技术问题,必须排除一个参与者的数据。对于剩下的11名身体健全的参与者,我们获得M1分类器的校准准确率为77.9±7.8%(“movlook”和“rest”),M2的校准准确率为62.5±6.5%6.5%(“movlook”vs“only look”)。M1对应的机会水平精度(alpha=0.05)为72.9±2.6%,M2为68.0±2.0%。M1分类者在11名参与者中有8个表现优于概率,而M2分类者在11名参与者中有2名表现更好。对于在线反馈运行,分层分类方法的平均检出率为60.0±24.0%。相应的概率水平准确性为48.9±1.8%,11名参与者中有7名的分类者表现优于概率。
对传感器空间的数据进行分析,发现“movlook”和“onlylook”条件的校准数据存在前中心负性,“movlook”在−为0.1 s,“only look”条件在0s时达到峰值(图2a)。当其呈阴性时,枕叶和顶叶通道均呈阳性(图2b)。在组水平上,在通道和时间点上观察到“movlook”和“onlylook”条件之间的头皮电位没有统计学上的显著差异(图2a和2b)。具体地说,在电极Cz中,只有2人在“movlook”条件下表现出更强的负性。在线反馈运行中检测到的数据,分类器也识别到与校准过程中观察到的头皮电位(图2a)。
当分析源空间中的数据时,统计测试同样显示,在任何时间点或ROI上,“movlook”和“onlylook”条件之间没有明显的差异。尽管存在不显著的差异,但在平均皮层活动中可以观察到一种趋势,与“movlook”相关的活动似乎比“onlylook”更位于正面。此外,“movlook”活动扩展到lef运动区,这与被执行的运动对侧的运动区相对应(图2c)
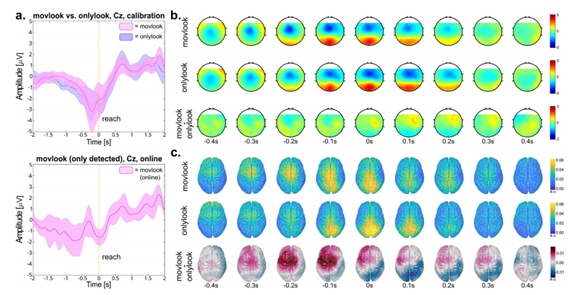
图2 身体健全的参与者,目标导向的运动意图的结果
轨迹解码
图3c显示了解码器激活模式在源空间中的投影。定性地说,在x和y速度解码模型的顶叶-枕叶区观察到最显著的激活。统计分析进一步支持了观察结果,揭示了覆盖运动和顶枕叶区域的ROI中的速度激活模式的显著激活。左半叶和右半球的楔前叶(PCun)、上顶叶(SPL)和下顶叶(IPL)小叶、枕回(OcG)和楔形叶(Cu)对这两种速度成分都有明显的活跃。此外,在lef躯体感觉皮层(S1)中发现了显著的激活,而右侧S1和初级运动皮层(M1)显示了y速度成分的显著激活。距离激活模式也覆盖了顶枕运动区和对侧运动区(图4c),但未发现统计学意义。
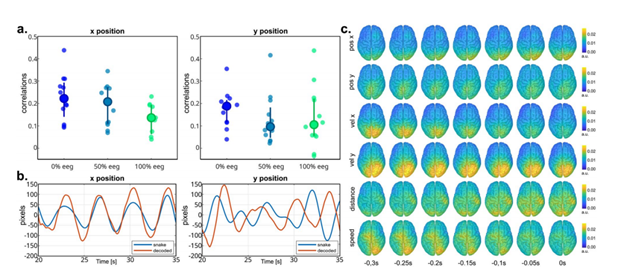
图3 身体健全的参与者,轨迹解码结果
结论
在本文中,我们提出了一个快速在线研究的结果,整合了自然运动控制的三个方面,即目标导向的运动意图、运动轨迹解码和错误处理,在一个独特的混合框架中,以实现使用脑电图信号对光标的闭环控制。
总的来说,本研究显示了合并三个基于脑电图的bci在一个独特的控制框架中的可行性,其目标是允许基于自然尝试运动的更直观的控制。对传感器空间的脑电图分析显示,MRCP形状与以往的研究相似,以及错误条件触发后的典型ErrP形状。源分析融合了感觉运动区和后顶叶区在检测目标导向的运动意图和轨迹解码中的重要性。然而,当只比较眼球运动的条件,或与同时进行的运动尝试时,没有发现明显的偏差。关于轨迹解码,参与者被要求尝试手臂运动来完成追踪跟踪任务。解码算法成功地重建了二维尝试的运动轨迹,尽管其性能低于之前涉及显性和尝试运动的研究。我们将这种减少归因于实验持续时间较长和范式复杂性的增加,因为任务之间的持续切换可能会带来额外的认知工作量,并降低了集中注意力的能力。研究表明,误差可以在追踪跟踪任务的基础上成功地诱导和检测,尽管连续错误处理的探索可能是未来一个更有前途的研究方向,思考神经假体连续控制场景。
参考文献:Towards unlocking motor control in spinal cord injured by applying an online EEG‑based framework to decode motor intention, trajectory and error processing
—— End ——
仅用于学术分享,若侵权请留言,即时删侵!
加入社群
欢迎加入脑机接口社区交流群,
探讨脑机接口领域话题,实时跟踪脑机接口前沿。
加微信群:
添加微信:RoseBrain【备注:姓名+行业/专业】。
加QQ群:913607986
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBrain
2.加入社区成为兼职创作者,请联系微信:RoseBrain


一键三连「分享」、「点赞」和「在看」
不错每一条脑机前沿进展 ~


















 838
838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











