






/*
@remark: calculate the bspline in const stage
@input:
density: the density of real point in bspline
ctrlPnts: the control point of this bspline
@ouput:
spline: the b-spline real interpolating points
*/
void bspline (int density, std::vector<POINT*> ctrlPnts, std::vector<POINT*>& spline )
{
int i,j, stage;
double delta, u;
POINT *pPnt;
// init parameter
delta = 1.0/density;
stage = 2;
//stage = 3;
// begin generate
for ( i=0; i<ctrlPnts.size()-2; ++i ){
// generate spline per section( 3 ctrlPnt & 3 basePolynomial )
for ( j=0, u=0.0; j<density; ++j, u+=delta ){
pPnt = new POINT(0.0,0.0);
for ( k=0; k<=2; ++k ){
base = bsplineBase2 ( k, u );
// base = bsplineBase3 ( k, u ); will be replaced when in power 3
pPnt->x += base * ctrlPnt[i+k].x;
pPnt->y += base * ctrlPnt[i+k].y;
}
spline.push_back ( pPnt );
}
}
}
/*
@remark: const power of base polynomial
@input:
idx: the index of coefficient of polynomial
u: the parameter of base polynomial
*/
double bsplineBase2( int idx, double u )
{
double rtn = 0;
switch ( idx ){
case 0:
rtn = (1-u)*(1-u)/2;
break;
case 1:
rtn = (1+2*u-2*u*u)/2;
break;
case 2:
rtn = u*u/2;
break;
};
return rtn;
}
/*
@remark: const power of base polynomial
@input:
idx: the index of coefficient of polynomial
u: the parameter of base polynomial
*/
double bsplineBase3( int idx, double u )
{
double rtn = 0;
switch ( idx ){
case 0:
rtn = (1-u)*(1-u)*(1-u)/6;
break;
case 1:
rtn = (3*u*u*u-6*u*u+4)/6;
break;
case 2:
rtn = (1+3*u+3*u*u-3*u*u*u)/6;
break;
case 3:
rtn = u*u*u/6;
break;
};
return rtn;
}
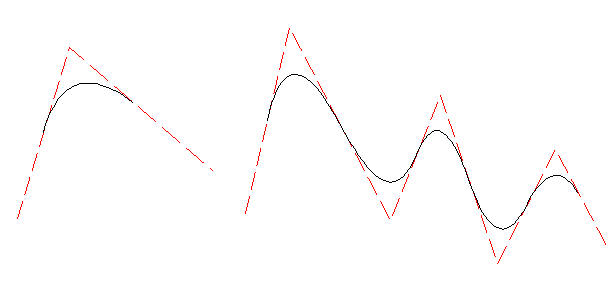
二阶的B样条
三阶的B样条
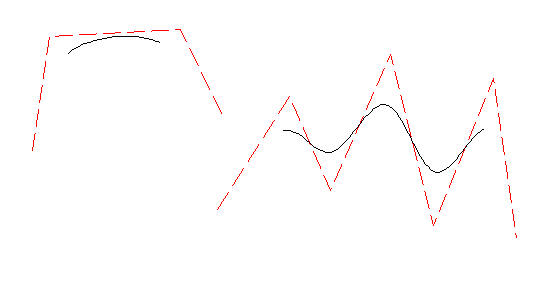
使用指定阶数的算法要比使用通式的算法效率高很多,有几点值得注意二阶使用三个控制点(对应的三个基函数)就可以确定出来,三阶则需要四个控制点(对应的四个基函数)才能确定出来,以此类推
@remark: calculate the bspline in const stage
@input:
density: the density of real point in bspline
ctrlPnts: the control point of this bspline
@ouput:
spline: the b-spline real interpolating points
*/
void bspline (int density, std::vector<POINT*> ctrlPnts, std::vector<POINT*>& spline )
{
int i,j, stage;
double delta, u;
POINT *pPnt;
// init parameter
delta = 1.0/density;
stage = 2;
//stage = 3;
// begin generate
for ( i=0; i<ctrlPnts.size()-2; ++i ){
// generate spline per section( 3 ctrlPnt & 3 basePolynomial )
for ( j=0, u=0.0; j<density; ++j, u+=delta ){
pPnt = new POINT(0.0,0.0);
for ( k=0; k<=2; ++k ){
base = bsplineBase2 ( k, u );
// base = bsplineBase3 ( k, u ); will be replaced when in power 3
pPnt->x += base * ctrlPnt[i+k].x;
pPnt->y += base * ctrlPnt[i+k].y;
}
spline.push_back ( pPnt );
}
}
}
/*
@remark: const power of base polynomial
@input:
idx: the index of coefficient of polynomial
u: the parameter of base polynomial
*/
double bsplineBase2( int idx, double u )
{
double rtn = 0;
switch ( idx ){
case 0:
rtn = (1-u)*(1-u)/2;
break;
case 1:
rtn = (1+2*u-2*u*u)/2;
break;
case 2:
rtn = u*u/2;
break;
};
return rtn;
}
/*
@remark: const power of base polynomial
@input:
idx: the index of coefficient of polynomial
u: the parameter of base polynomial
*/
double bsplineBase3( int idx, double u )
{
double rtn = 0;
switch ( idx ){
case 0:
rtn = (1-u)*(1-u)*(1-u)/6;
break;
case 1:
rtn = (3*u*u*u-6*u*u+4)/6;
break;
case 2:
rtn = (1+3*u+3*u*u-3*u*u*u)/6;
break;
case 3:
rtn = u*u*u/6;
break;
};
return rtn;
}
二阶的B样条
三阶的B样条
使用指定阶数的算法要比使用通式的算法效率高很多,有几点值得注意二阶使用三个控制点(对应的三个基函数)就可以确定出来,三阶则需要四个控制点(对应的四个基函数)才能确定出来,以此类推















 2536
2536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









