







基本原理
•
超声波是利用反射的原理测量距离的,被测距离一端为超声波传感器,另一端必须有能反射超声波的物体。测量距离时,将超声波传感器对准反射物发射超声波,并开始计时,超声波在空气中传播到达障碍物后被反射回来,传感器接收到反射脉冲后立即停止计时,然后根据超声波的传播速度和计时时间就能计算出两端的距离。测量距离
D
为
式中 c——超声波的传播速度;
t——超声波发射到接收所需时间的一半,也就是单程传播时间。
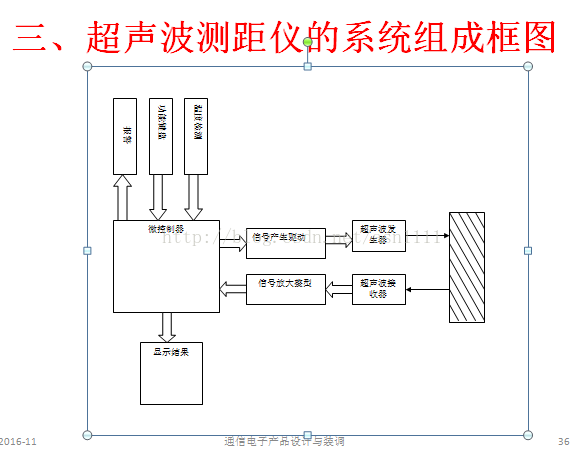
程序框图
超声波测距仪的主要技术指标
测量距离:0.20m-1.3m
测温范围:-10℃~115℃
测量距离精度:1cm
实时功率:0.05W
标准频率:40kHz
声压级:120±3(公式:S.P.L.= 20logP/Pre (dB))
系统发射功率:1mW(max)
工作电流:80mA(min)、90mA(max)
输入电源电压:5V
超声波模块
HC-SR04
程序
/***********************************************************************************************************/
//HC-SR04 超声波测距模块 DEMO 程序
//晶振:11。0592
//接线:模块TRIG接 P1.2 ECH0 接P1.1
//串口波特率9600
/***********************************************************************************************************/
#include <AT89X51.H>
#include <intrins.h>
#include <STDIO.H>
#define uchar unsigned char
#define uint unsigned int
#define RX P1_1
#define TX P1_2
unsigned int time=0;
unsigned int timer=0;
float S=0;
bit flag =0;
/********************************************************/
void Conut(void)
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.87)/100; //算出来是CM
if(flag==1) //超出测量
{
flag=0;
printf("-----\n");
}
printf("S=%f\n",S);
}
/********************************************************/
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
/********************************************************/
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
/********************************************************/
void StartModule() //T1中断用来扫描数码管和计800MS启动模块
{
TX=1; //800MS 启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
/********************************************************/
void main(void)
{
TMOD=0x21; //设T0为方式1,GATE=1;
SCON=0x50;
TH1=0xFD;
TL1=0xFD;
TH0=0;
TL0=0;
TR0=1;
ET0=1; //允许T0中断
TR1=1; //开启定时器
TI=1;
EA=1; //开启总中断
while(1)
{
StartModule();
while(!RX); //当RX为零时等待
TR0=1; //开启计数
while(RX); //当RX为1计数并等待
TR0=0; //关闭计数
Conut(); //计算
delayms(10); //100MS
}
}测距2cm-400cm














 790
790











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









