




 本文介绍了如何在Pixhawk飞行控制器上通过I2C方式添加超声波模块,以解决串口限制问题。Pixhawk固件已内置MB12xx超声波传感器驱动,详细连接说明和参考资料链接提供。
本文介绍了如何在Pixhawk飞行控制器上通过I2C方式添加超声波模块,以解决串口限制问题。Pixhawk固件已内置MB12xx超声波传感器驱动,详细连接说明和参考资料链接提供。
1 说明
在Pixhawk的固件中,已经实现了串口和i2c的底层驱动,并不需要自己去写驱动。通过串口的方式添加超声波的缺点是串口不够,不能添加多个超声波模块,此时需要用到i2c的方式去添加了。在Pixhawk固件中,i2c的方式去添加超声波模块传感器已经实现了一个mb12xx超声波产品的驱动,可以直接使用,模块位置为:../src/drivers/mb12xx。当然还可以通过PWM的方式去添加超声波模块(模块支持此功能);
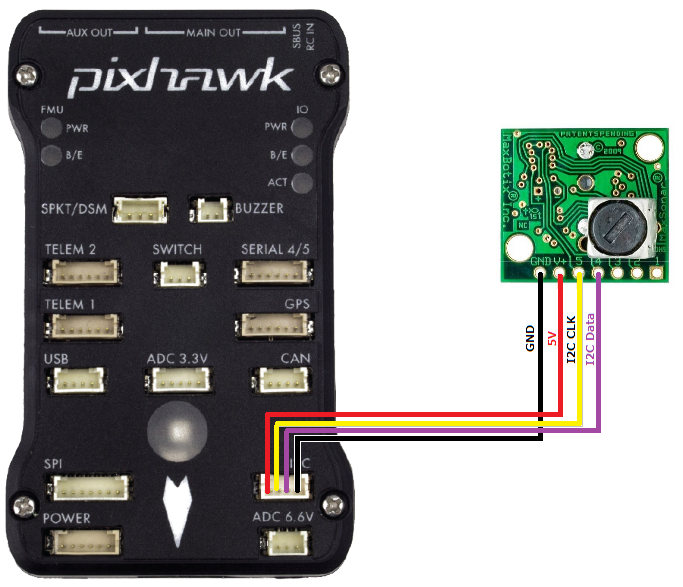
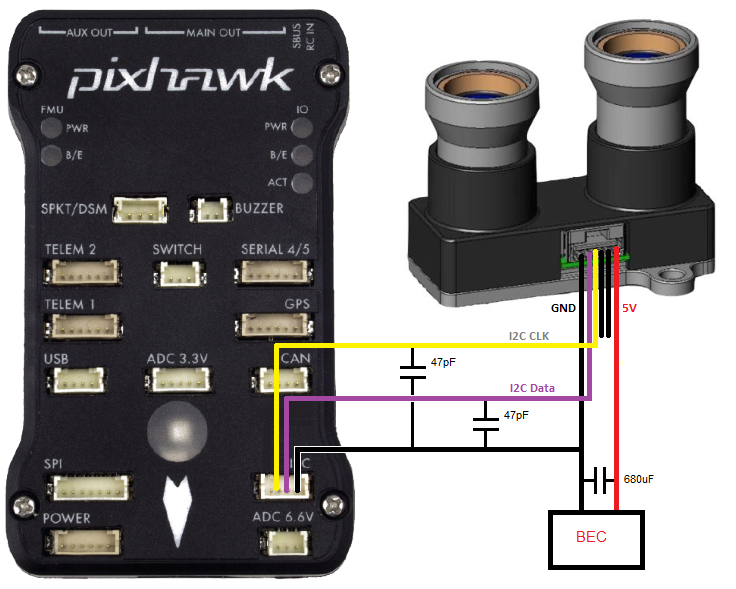
2 模块连接说明
超声波mb12xx

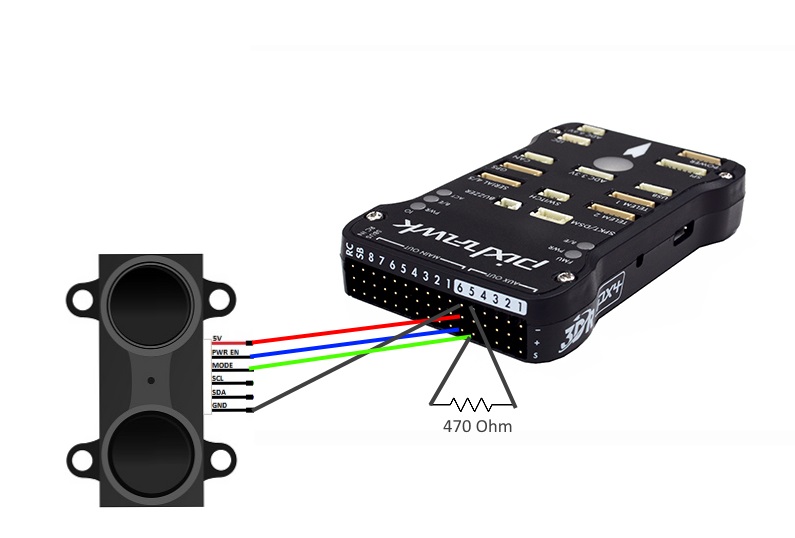
激光雷达(支持通过PWM方式)
3 相关资料
http://copter.ardupilot.com/wiki/common-optional-hardware/common-rangefinder-landingpag
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1576
1576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









