







篇一:OpenCV矩阵运算总结
原文地址:http://www.cvvision.cn/273.html
著作权归作者所有。
商业转载请联系作者获得授权,非商业转载请注明出处。
作者:cvvision
链接:http://www.cvvision.cn/273.html
来源:CV视觉网
一、矩阵
Mat I,img,I1,I2,dst,A,B;
double k,alpha;
Scalar s;
1.加法
I=I1+I2;//等同add(I1,I2,I);
add(I1,I2,dst,mask,dtype);
scaleAdd(I1,scale,I2,dst);//dst=scale*I1+I2;
2.减法
absdiff(I1,I2,I);//I=|I1-I2|;
A-B;A-s;s-A;-A;
subtract(I1,I2,dst);
3.乘法
I=I.mul(I);//点乘,I.mul(I,3);–>I=3*I.^2
Mat C=A.mul(5/B);//==divide(A,B,C,5);
A*B;矩阵相乘
I=alpha*I;
Mat::cross(Mat);//三维向量(或矩阵)的叉乘,A.cross(B)
double Mat::dot(Mat);//2个向量(或矩阵)的点乘的结果,A.dot(B)
mul——-multiply
pow(src,double p,dst);//如果p是整数dst(I)=src(I)^p;其他|src(I)|^p
4.除法
divide(I1,I2,dst,scale,int dtype=-1);//dst=saturate_cast(I1*scale/I2);
A/B;alpha/A;都是点除
5.转换
I.convertTo(I1,CV_32F);//类型转换
A.t();//转置
flip(I,dst,int flipCode);//flipCode=0是上下翻转,>0时左右翻转,<0时一起来
sqrt(I,dst);
cvtColor(I,dst,int code,int dstCn=0);
resize:对图像进行形变
————————————————————————–
6.其他
Scalar s=sum(I);各通道求和
norm,countNonZero,trace,determinant,repeat都是返回Mat或者Scalar
countNonZero:用来统计非零的向量个数.(rows*cols个)
Scalar m=mean(I);//各通道求平均
Mat RowClone=C.row(1).clone();//复制第2行
addWeight(I1,alpha,I2,beta,gamma,dst,int dtype=-1);//dst=saturate(alpha*I1+beta*I2+gamma);dtype是dst的深度
—————————————————————————-
7.运算符
log10()
exp(I,dst);//dst=exp(I);计算每个数组元素的指数
log(I,dst);//如果Iij!=0;则dstij=log(|Iij|)
randu(I,Scalar::all(0),Scalar::all(255));
Mat::t()转置
Mat::inv(int method=DECOMP_LU)求逆。method=DECOMP_CHOLESKY(专门用于对称,速度是LU的2倍),DECOMP_SVD//A.inv();A.inv()*B;
invert(I1,dst,int method=DECOMP_LU);//用法同上
MatExpr abs(Mat)//求绝对值
A cmpop B;A compop alpha;alpha cmpop A;这里cmpop表示>,>=,==,!=,<=,<等,结果是CV_8UC1的mask的0或255
按位运算:A logicop B;A logicop s;s logicop A;~A;这里logicop代表&,|,^
bitwise_not(I,dst,mask);//inverts所有的队列
还有bitwise_and,bitwise_or,bitwise_xor,
min(A,B);min(A,alpha);max(A,B);max(A,alpha);都返回MatExpr,返回的dst和A的类型一样
double determinant(Mat);//行列式
bool eigen(I1,dst,int lowindex=-1,int highindex=-1);//
bool eigen(I1,dst,I,int…);//得到特征值向量dst和对应特征值的特征向量
minMaxLoc(I1,&minVal,&maxVal,Point *minLoc=0,Point* MaxLoc=0,mask);
//minLoc是2D时距原点最小的点(未考证)
——————————————————————————
8.初始化
Mat I(img,Rect(10,10,100,100));//用一块地方初始化。
Mat I=img(Range:all(),Range(1,3));//所有行,1~3列
Mat I=img.clone();//完全复制
img.copyTo(I);//传递矩阵头
Mat I(2,2,CV_8UC3,Scalar(0,0,255));//I=[0,0,255,0,0,255;0,0,255,0,0,255];
Mat E=Mat::eye(4,4,CV_64F);//对角矩阵
Mat O=Mat::ones(2,2,CV_32F);//全一矩阵
Mat Z=Mat::zeros(3,3,CV_8UC1);//全零矩阵
Mat C=(Mat_<double>(2,2)<<0,-1,2,3);//如果是简单矩阵的初始化
Mat::row(i);Mat::row(j);Mat::rowRange(start,end);Mat::colRange(start,end);都只是创建个头
Mat::diag(int d);d=0是是主对角线,d=1是比主低的对角线,d=-1….
static Mat Mat::diag(const Mat& matD)
Mat::setTo(Scalar &s);以s初始化矩阵
Mat::push_back(Mat);在原来的Mat的最后一行后再加几行
Mat::pop_back(size_t nelems=1);//移出最下面几行
——————————————————————————-
9.矩阵读取和修改
(1)1个通道:
for(int i=0;i<I.rows;++i)
for(int j=0;j<I.cols;++j)
I.at<uchar>(i,j)=k;
(2)3个通道:
Mat_<Vec3b> _I=I;//他没有4个通道寸,只有3个通道!
for(int i=0;i<I.rows;++i)
for(int j=0;j<I.cols;++j)
{
_I(i,j)[0]=b;
_I(i,j)[1]=g;
_I(i,j)[2]=r;
}
I=_I;
————————————————————
或者直接用I.at<Vec3b>(i,j)[0]….
————————————————-
float *s;
for(i=0;i<dealImg.rows;i++)
{s=proImg.ptr<float>(i);
for(j=0;j<dealImg.cols;j++)
{a1=s[3*j+1]-m1;
a2=s[3*j+2]-m2;}}
————————————————————————-
(3)其他机制
I.rows(0).setTo(Scalar(0));//把第一行清零
saturate_cast<uchar>(…);//可以确保内容为0~255的整数
Mat::total();返回一共的元素数量
size_t Mat::elemSize();返回元素的大小:CV_16SC3–>3*sizeof(short)–>6
size_t Mat::elemSize1();返回元素一个通道的大小CV_16SC3–>sizeof(short)–>2
int Mat::type()返回他的类型CV_16SC3之类
int Mat::depth()返回深度:CV_16SC3–>CV_16S
int Mat::channels()返回通道数
size_t Mat:step1()返回一个被elemSize1()除以过的step
Size Mat::size()返回Size(cols,rows);如果大于2维,则返回(-1,-1),都是先宽再高的
bool Mat::empty()如果没有元素返回1,即Mat::total()==0或者Mat::data==NULL
uchar *Mat::ptr(int i=0)指向第i行
Mat::at(int i)(int i,int j)(Point pt)(int i,int j,int k)
RNG随机类:next,float RNG::uniform(float a,float b);..
double RNG::gaussian(double sigma);
RNG::fill(I,int distType,Mat low,Mat up);//用随机数填充
randu(I,low,high);
randn(I,Mat mean,Mat stddev);
reduce(I,dst,int dim,int reduceOp,int dtype=-1);//可以统计每行或每列的最大、最小、平均值、和
setIdentity(dst,Scalar &value=Scalar(1));//把对角线替换为value
//效果等同:Mat A=Mat::eye(4,3,CV_32F)*5;
————————————————————–
10.较复杂运算
gemm(I1,I2,alpha,I3,beta,dst,int flags=0);//I1至少是浮点型,I2同I1,flags用来转置
//gemm(I1,I2,alpha,I3,beta,dst,GEMM_1_T,GEMM_3_T);–>dst=alpha*I1.t()*I2+beta*I3.t();可用此完全代替此函数
mulTransposed(I,dst,bool aTa,Mat delta=noArray(),double scale=1,int rtype=-1);
//I是1通道的,和gemm不同,他可用于任何类型。
//如果aTa=flase时,dst=scale*(I-delta).t()*(I-delta);
//如果是true,dst=scale*(I-delta)(I-delta).t();
calcCovarMatrix(Mat,int,Mat,Mat,int,int=);calcCovarMatrix(Mat I,Mat covar,Mat mean,int flags,int=);
cartToPolar//转到极坐标
compare(I1,I2,dst,cmpop);cmpop=CMP_EQ,CMP_GT,CMP_GE,CMP_LT,CMP_LE,COM_NE
completeSymm(M,bool lowerToUpper=false);当lowerToUpper=true时Mij=Mji(i<j);当为flase时,Mij=Mji(i>j)
变成可显示图像:convertScaleAbs(I,dst,alpha,beta);dst=saturate_cast<uchar>(|alpha*I+beta|);
dct(I,dst,int flags=0);//DCT变换,1维、2维的矩阵;flags=DCT_INVERSE,DCT_ROWS
idct,dft,idft
inRange(I1,I_low,I_up,dst);//dst是CV_8UC1,在2者之间就是255
Mahalanobis(vec1,vec2,covar);
merge(vector<Mat>,Mat);//把多个Mat组合成一个和split相反
double norm(…):当src2木有时,norm可以计算出最长向量、向量距离和、向量距离和的算术平方根
solveCubic解3次方程,solvePoly解n次方程
排列:sort,sortIdx
mixChannels();对某个通道进行各种传递
—————————————————————–
11.未懂的函数
getConvertElem,extractImageCOI,LUT
magnitude(x,y,dst);//I1,I2都是1维向量,dst=sqrt(x(I)^2+y(I)^2);
meanStdDev,
MulSpectrums(I1,I2,dst,flags);傅里叶
normalize(I,dst,alpha,beta,int normType=NORM_L2,int rtype=-1,mask);//归一化
PCA,SVD,solve,transform,transpose
二、其他数据结构
Point2f P(5,1);
Point3f P3f(2,6,7);
vector<float> v;v.push_back((float)CV_PI);v.push_back(2);v.push_back(3.01f);//不断入
vector<Point2f> vPoints(20);//一次定义20个
三、常用方法
Mat mask=src<0;这样很快建立一个mask了
四、以后可能用到的函数
randShuffle,repeat
五、矩阵处理
1、矩阵的内存分配与释放
(1) 总体上:
Opencv 使用C语言来进行矩阵操作。不过实际上有很多C++语言的替代方案可以更高效地完成。
在OpenCV中向量被当做是有一个维数为1的N维矩阵.
矩阵按行-行方式存储,每行以4字节(32位)对齐.
(2) 为新矩阵分配内存:
CvMat* cvCreateMat(int rows, int cols, int type);
type: 矩阵元素类型.
按CV_<bit_depth>(S|U|F)C<number_of_channels> 方式指定. 例如: CV_8UC1 、CV_32SC2.
示例:
CvMat* M = cvCreateMat(4,4,CV_32FC1);
(3) 释放矩阵内存:
CvMat* M = cvCreateMat(4,4,CV_32FC1);
cvReleaseMat(&M);
(4) 复制矩阵:
CvMat* M1 = cvCreateMat(4,4,CV_32FC1);
CvMat* M2;
M2=cvCloneMat(M1);
(5) 初始化矩阵:
double a[] = { 1, 2, 3, 4,
5, 6, 7, 8,
9, 10, 11, 12 };
CvMat Ma=cvMat(3, 4, CV_64FC1, a);
//等价于:
CvMat Ma;
cvInitMatHeader(&Ma, 3, 4, CV_64FC1, a);
(6) 初始化矩阵为单位矩阵:
CvMat* M = cvCreateMat(4,4,CV_32FC1);
cvSetIdentity(M); // does not seem to be working properl
2、访问矩阵元素
(1) 假设需要访问一个2D浮点型矩阵的第(i, j)个单元.
(2) 间接访问:
cvmSet(M,i,j,2.0); // Set M(i,j)
t = cvmGet(M,i,j); // Get M(i,j)
(3) 直接访问(假设矩阵数据按4字节行对齐):
CvMat* M = cvCreateMat(4,4,CV_32FC1);
int n = M->cols;
float *data = M->data.fl;
data[i*n+j] = 3.0;
(4) 直接访问(当数据的行对齐可能存在间隙时 possible alignment gaps):
CvMat* M = cvCreateMat(4,4,CV_32FC1);
int step = M->step/sizeof(float);
float *data = M->data.fl;
(data+i*step)[j] = 3.0;
(5) 对于初始化后的矩阵进行直接访问:
double a[16];
CvMat Ma = cvMat(3, 4, CV_64FC1, a);
a[i*4+j] = 2.0; // Ma(i,j)=2.0;
3、矩阵/向量运算
(1) 矩阵之间的运算:
CvMat *Ma, *Mb, *Mc;
cvAdd(Ma, Mb, Mc); // Ma+Mb -> Mc
cvSub(Ma, Mb, Mc); // Ma-Mb -> Mc
cvMatMul(Ma, Mb, Mc); // Ma*Mb -> Mc
(2) 矩阵之间的元素级运算:
CvMat *Ma, *Mb, *Mc;
cvMul(Ma, Mb, Mc); // Ma.*Mb -> Mc
cvDiv(Ma, Mb, Mc); // Ma./Mb -> Mc
cvAddS(Ma, cvScalar(-10.0), Mc); // Ma.-10 -> Mc
(3) 向量乘积:
double va[] = {1, 2, 3};
double vb[] = {0, 0, 1};
double vc[3];
CvMat Va=cvMat(3, 1, CV_64FC1, va);
CvMat Vb=cvMat(3, 1, CV_64FC1, vb);
CvMat Vc=cvMat(3, 1, CV_64FC1, vc);
double res=cvDotProduct(&Va,&Vb); // 向量点乘: Va . Vb -> res
cvCrossProduct(&Va, &Vb, &Vc); // 向量叉乘: Va x Vb -> Vc
注意在进行叉乘运算时,Va, Vb, Vc 必须是仅有3个元素的向量.
(4) 单一矩阵的运算:
CvMat *Ma, *Mb;
cvTranspose(Ma, Mb); // 转置:transpose(Ma) -> Mb (注意转置阵不能返回给Ma本身)
CvScalar t = cvTrace(Ma); // 迹:trace(Ma) -> t.val[0]
double d = cvDet(Ma); // 行列式:det(Ma) -> d
cvInvert(Ma, Mb); // 逆矩阵:inv(Ma) -> Mb
(5) 非齐次线性方程求解:
CvMat* A = cvCreateMat(3,3,CV_32FC1);
CvMat* x = cvCreateMat(3,1,CV_32FC1);
CvMat* b = cvCreateMat(3,1,CV_32FC1);
cvSolve(&A, &b, &x); // solve (Ax=b) for x
(6) 特征值与特征向量 (矩阵为方阵):
CvMat* A = cvCreateMat(3,3,CV_32FC1);
CvMat* E = cvCreateMat(3,3,CV_32FC1);
CvMat* l = cvCreateMat(3,1,CV_32FC1);
cvEigenVV(A, E, l); // l = A 的特征值(递减顺序)
// E = 对应的特征向量 (行向量)
(7) 奇异值分解(SVD):====
CvMat* A = cvCreateMat(3,3,CV_32FC1);
CvMat* U = cvCreateMat(3,3,CV_32FC1);
CvMat* D = cvCreateMat(3,3,CV_32FC1);
CvMat* V = cvCreateMat(3,3,CV_32FC1);
cvSVD(A, D, U, V, CV_SVD_U_T|CV_SVD_V_T); // A = U D V^T
标志位使矩阵U或V按转置形式返回 (若不转置可能运算出错).篇二:OpenCV的基本矩阵操作与示例
OpenCV中的矩阵操作非常重要,本文总结了矩阵的创建、初始化以及基本矩阵操作,给出了示例代码,主要内容包括:
- 创建与初始化
- 矩阵加减法
- 矩阵乘法
- 矩阵转置
- 矩阵求逆
- 矩阵非零元素个数
- 矩阵均值与标准差
- 矩阵全局极值及位置
- 其他矩阵运算函数列表
1. 创建与初始化矩阵
1.1 数据类型
建立矩阵必须要指定矩阵存储的数据类型,图像处理中常用的几种数据类型如下:
包括数据位深度8位、32位,数据类型U:uchar、F:float型以及通道数C1:单通道、C3:三通道、C4:四通道。
1.2 基本方法
我们可以通过载入图像来创建Mat类型矩阵,当然也可以直接手动创建矩阵,基本方法是指定矩阵尺寸和数据类型:
运行结果:
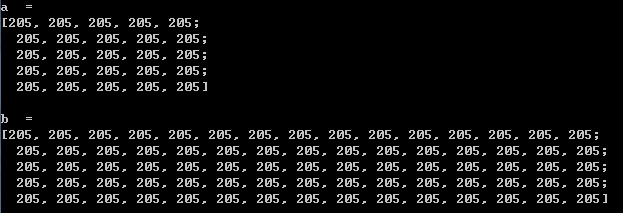
3通道矩阵中,一个矩阵元素包含3个变量。
1.3 初始化方法
上述方法不初始化矩阵数据,因此将出现随机值。如果想避免这种情况,可使用Mat类的几种初始化创建矩阵的方法:
运行结果:

2. 矩阵运算
2.1 基本概念
OpenCV的Mat类允许所有的矩阵运算。
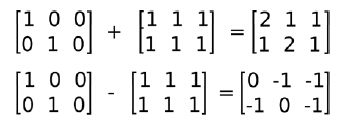
2.2 矩阵加减法
我们可以使用"+"和"-"符号进行矩阵加减运算。
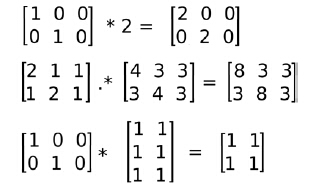
2.3 矩阵乘法
使用"*"号计算矩阵与标量相乘,矩阵与矩阵相乘(必须满足矩阵相乘的行列数对应规则)
2.4 矩阵转置
矩阵转置是将矩阵的行与列顺序对调(第i行转变为第i列)形成一个新的矩阵。OpenCV通过Mat类的t()函数实现。运行结果:

2.5 求逆矩阵
逆矩阵在某些算法中经常出现,在OpenCV中通过Mat类的inv()方法实现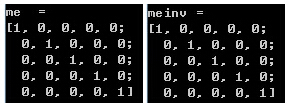
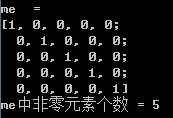
2.6 计算矩阵非零元素个数
计算物体的像素或面积常需要用到计算矩阵中的非零元素个数,OpenCV中使用countNonZero()函数实现。
2.7 均值和标准差
OpenCV提供了矩阵均值和标准差计算功能,可以使用meanStdDev(src,mean,stddev)函数实现。
参数
- src – 输入矩阵或图像
- mean – 均值,OutputArray
- stddev – 标准差,OutputArray
运行结果:
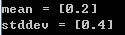
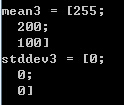
需要说明的是,如果src是多通道图像或多维矩阵,则函数分别计算不同通道的均值与标准差,因此返回值mean和stddev为对应维度的向量。
多通道矩阵运算结果:

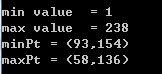
2.8 求最大最小值
求输入矩阵的全局最大最小值及其位置,可使用函数:
参数:
- src – 输入单通道矩阵(图像).
- minVal – 指向最小值的指针, 如果未指定则使用NULL
- maxVal – 指向最大值的指针, 如果未指定则使用NULL
- minLoc – 指向最小值位置(2维情况)的指针, 如果未指定则使用NULL
- maxLoc – 指向最大值位置(2维情况)的指针, 如果未指定则使用NULL
- mask – 可选的蒙版,用于选择待处理子区域
运行结果:

3. 其他矩阵运算
其他矩阵运算函数见下表:| Function (函数名) | Use (函数用处) |
| add | 矩阵加法,A+B的更高级形式,支持mask |
| scaleAdd | 矩阵加法,一个带有缩放因子dst(I) = scale * src1(I) + src2(I) |
| addWeighted | 矩阵加法,两个带有缩放因子dst(I) = saturate(src1(I) * alpha + src2(I) * beta + gamma) |
| subtract | 矩阵减法,A-B的更高级形式,支持mask |
| multiply | 矩阵逐元素乘法,同Mat::mul()函数,与A*B区别,支持mask |
| gemm | 一个广义的矩阵乘法操作 |
| divide | 矩阵逐元素除法,与A/B区别,支持mask |
| abs | 对每个元素求绝对值 |
| absdiff | 两个矩阵的差的绝对值 |
| exp | 求每个矩阵元素 src(I) 的自然数 e 的 src(I) 次幂 dst[I] = esrc(I) |
| pow | 求每个矩阵元素 src(I) 的 p 次幂 dst[I] = src(I)p |
| log | 求每个矩阵元素的自然数底 dst[I] = log|src(I)| (if src != 0) |
| sqrt | 求每个矩阵元素的平方根 |
| min, max | 求每个元素的最小值或最大值返回这个矩阵 dst(I) = min(src1(I), src2(I)), max同 |
| minMaxLoc | 定位矩阵中最小值、最大值的位置 |
| compare | 返回逐个元素比较结果的矩阵 |
| bitwise_and, bitwise_not, bitwise_or, bitwise_xor | 每个元素进行位运算,分别是和、非、或、异或 |
| cvarrToMat | 旧版数据CvMat,IplImage,CvMatND转换到新版数据Mat |
| extractImageCOI | 从旧版数据中提取指定的通道矩阵给新版数据Mat |
| randu | 以Uniform分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::UNIFORM) |
| randn | 以Normal分布产生随机数填充矩阵,同 RNG::fill(mat, RNG::NORMAL) |
| randShuffle | 随机打乱一个一维向量的元素顺序 |
| theRNG() | 返回一个默认构造的RNG类的对象 theRNG()::fill(...) |
| reduce | 矩阵缩成向量 |
| repeat | 矩阵拷贝的时候指定按x/y方向重复 |
| split | 多通道矩阵分解成多个单通道矩阵 |
| merge | 多个单通道矩阵合成一个多通道矩阵 |
| mixChannels | 矩阵间通道拷贝,如Rgba[]到Rgb[]和Alpha[] |
| sort, sortIdx | 为矩阵的每行或每列元素排序 |
| setIdentity | 设置单元矩阵 |
| completeSymm | 矩阵上下三角拷贝 |
| inRange | 检查元素的取值范围是否在另两个矩阵的元素取值之间,返回验证矩阵 |
| checkRange | 检查矩阵的每个元素的取值是否在最小值与最大值之间,返回验证结果bool |
| sum | 求矩阵的元素和 |
| mean | 求均值 |
| meanStdDev | 均值和标准差 |
| countNonZero | 统计非零值个数 |
| cartToPolar, polarToCart | 笛卡尔坐标与极坐标之间的转换 |
| flip | 矩阵翻转 |
| transpose | 矩阵转置,比较 Mat::t() AT |
| trace | 矩阵的迹 |
| determinant | 行列式 |A|, det(A) |
| eigen | 矩阵的特征值和特征向量 |
| invert | 矩阵的逆或者伪逆,比较 Mat::inv() |
| magnitude | 向量长度计算 dst(I) = sqrt(x(I)2 + y(I)2) |
| Mahalanobis | Mahalanobis距离计算 |
| phase | 相位计算,即两个向量之间的夹角 |
| norm | 求范数,1-范数、2-范数、无穷范数 |
| normalize | 标准化 |
| mulTransposed | 矩阵和它自己的转置相乘 AT * A, dst = scale(src - delta)T(src - delta) |
| convertScaleAbs | 先缩放元素再取绝对值,最后转换格式为8bit型 |
| calcCovarMatrix | 计算协方差阵 |
| solve | 求解1个或多个线性系统或者求解最小平方问题(least-squares problem) |
| solveCubic | 求解三次方程的根 |
| solvePoly | 求解多项式的实根和重根 |
| dct, idct | 正、逆离散余弦变换,idct同dct(src, dst, flags | DCT_INVERSE) |
| dft, idft | 正、逆离散傅立叶变换, idft同dft(src, dst, flags | DTF_INVERSE) |
| LUT | 查表变换 |
| getOptimalDFTSize | 返回一个优化过的DFT大小 |
| mulSpecturms | 两个傅立叶频谱间逐元素的乘法 |
上表引自:http://blog.sina.com.cn/s/blog_7908e1290101i97z.html
转载请注明出处(本文更新链接):http://blog.csdn.net/iracer/article/details/51296631














 690
690











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









