







pixhawk软件分析之代码框架与文件结构
本文是在pixhawk的V1.4.1的代码基础上进行分析,更新的版本的代码目录的结构可能会有一些不同,毕竟pixhawk的代码版本更新是比较活跃的。
下图是px4的设计思想:
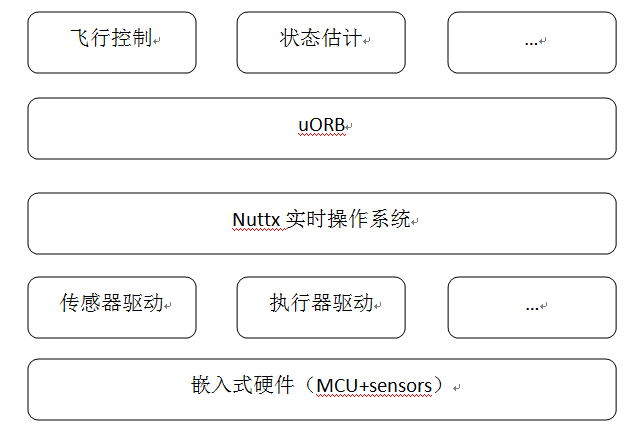
从图中可以看出上层的功能模块程序和下层的驱动程序分离,通过uORB进行数据之间的通讯,而Nuttx只是进行任务的管理和系统的维护。这样能够给驱动或功能的修改和添加,或实现跨平台的移植都带来方便。
下图firmwareV1.4.1的主要目录结构:
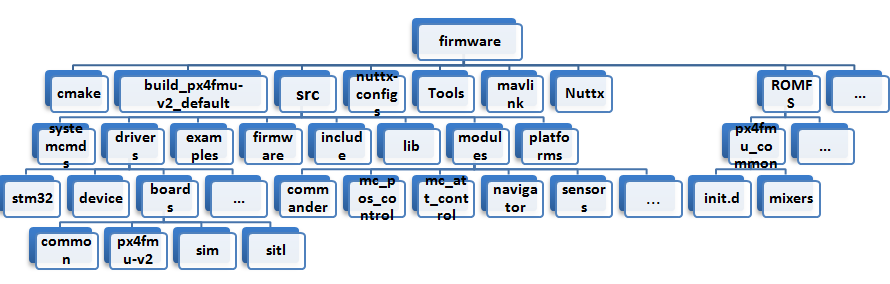
在firmware目录下cmake是编译工具;
build_px4fmu-v2_default是在编译后产生中间静态文件和最终生成的下载文件;
Tools文件夹下有一些工具,比如说下载工具。
mavlinek是mavlink工具包
Nuttx是包含的Nuttx操作系统源代码,还有nuttx-config这个nuttx的配置文件,以及还有ROS机器人操作系统的一些文件夹,这里就不只要介绍。这里主要介绍px4的源代码文件放置的src文件夹以及ROMFS文件夹下的启动文件。
src文件夹下一层文件目录如图所示:
systemcmds:主要放置了系统工具,能够通过启动文件启动或在nsh中去调用的工具。其中包括控制I2C,查看修改参数,查看软件版本,校准电调、查看系统性能、bootloader升级等工具。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 731
731











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









