




 本文介绍了近年来兴起的多个强化学习研究平台,包括实验场景类和研究框架类项目,如ViZDoom、Roboschool、TensorFlow Agents等,并概述了它们的特点及环境搭建方法。
本文介绍了近年来兴起的多个强化学习研究平台,包括实验场景类和研究框架类项目,如ViZDoom、Roboschool、TensorFlow Agents等,并概述了它们的特点及环境搭建方法。
原文链接:http://blog.csdn.net/jinzhuojun/article/details/78508203
前段时间Nature上发表的升级版Alpha Go - AlphaGo Zero再一次成为热点话题。作为其核心技术之一的Deep reinforcement learning(深度增强学习,或深度强化学习)也再一次引发关注。Alpha Zero最有意义的地方之一是它去除了从人类经验(棋谱)中学习的过程,而是完全通过“左右互博”式的学习击败了自己的“前辈”。这也很能体现强化学习的特点,就是在弱监督信息下通过”Trial and error”来自我学习。
这两年DRL随着深度学习的大热也是火得不行。于是各种新的强化学习研究平台如雨后春芛冒出来,而且趋势也是从简单的toy场景慢慢扩展到3D迷宫,第一人称射击游戏,即时策略类游戏和复杂机器人控制场景等。之前曾写文介绍了一些流行的强化学习实验环境(常用强化学习实验环境 I (MuJoCo, OpenAI Gym, rllab, DeepMind Lab, TORCS, PySC2))。本文是第二弹。 ps: 真羡慕现在研究强化学习的孩子,各种五花八门的实验环境,算法参考实现也可以随便挑。。。
在第一篇中介绍过的本文就不重复累述了,这里把本文涉及的项目大致分为两类:
1. 实验场景类: 像OpenAI Gym,MuJoCo这些。
| 名称 | github链接 | 类型 | 语言 | 平台 | 官方介绍 |
|---|---|---|---|---|---|
| ViZDoom | 代码 | FPS | C++, Lua, Java, Python | Linux,Windows,Mac OS | 官网 论文 教程 |
| Roboschool | 代码 | Physical simulation | Python | Linux, Mac OS | 博客 |
| Multi-Agent Particle Environment | 代码 | Multi-agent | Python | Linux | 论文 论文 |
2. 研究框架类: 一般会整合多个实验场景并提供方便统一的接口,方便其它场景的接入,并提供一些高级功能(如并行化),同时可能附带一些算法参考实现。
| 名称 | github链接 | 场景 | 语言 | 实现算法 | 相关机构 | 官方介绍 |
|---|---|---|---|---|---|---|
| TensorFlow Models | 代码 | OpenAI Gym, MuJoCo | Python | Actor Critic,TRPO,PCL,Unified PCL,Trust-PCL,PCL + Constraint Trust Region,REINFORCE,UREX | Community | N/A |
| TensorFlow Agents | 代码 | OpenAI Gym | Python | BatchPPO | 论文 | |
| Universe/universe-starter-agent | 代码1 代码2 | Atari, CarPole,Flashgames,Browser task, etc. | Python | A3C | OpenAI | 博客 |
| ELF | 代码 | MiniRTS, Atari, Go | Python | PG, AC | 论文 教程 | |
| Coach | 代码 | OpenAI Gym, ViZDoom, Roboschool, GymExtensions, PyBullet | Python | DQN, DDQN, Dueling Q Network, MMC, PAL, Distributional DQN, Bootstrapped DQN, NEC Distributed: N-Step Q Learning,NAF, PG, A3C, DDPG, PPO, Clipped PPO, DFP 可参见算法总览图 | Intel | 文档 博客 |
| Unity Machine Learning Agents | 代码 | 3D Balance Ball, GridWorld | Python | PPO | Unity | 文档 博客 |
下面介绍下它们的环境搭建。基础环境Ubuntu 16.04,Cuda 8.0(cuDNN 6.0),TensorFlow 1.2.1,Anaconda 4.4.0, Python 2.7/3.5。
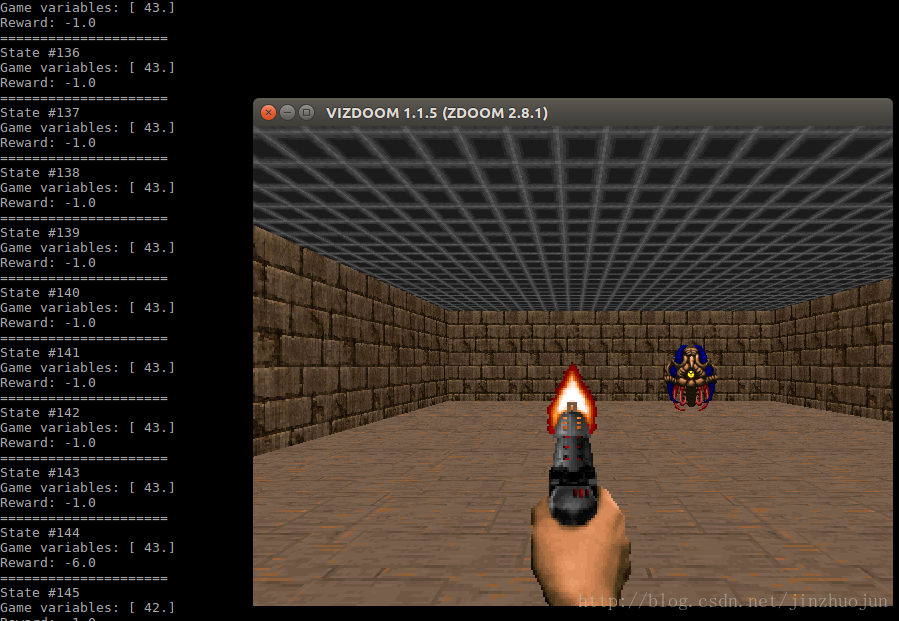
ViZDoom
提供了用AI玩毁灭战士游戏的环境。主要用于机器学习研究,尤其是DRL算法研究。环境搭建可以参见官方文档:https://github.com/mwydmuch/ViZDoom/blob/master/doc/Building.md
依赖中其它还好,比较麻烦的是需要Torch 7 。安装方法参考Getting started with Torch。
安装过程中会下载freedoom-0.11.3.zip,但我这网速渣下载非常慢,可以先从http://freedoom.github.io/download.html上下好放在项目的根目录 。如果你网速快请忽略。
安装完成后运行examples/python/basic.py,会起一个图形界面,其中智能体(agent)采取的动作是随机的。
它还用多种语言实现了DQN算法,位于examples目录下。
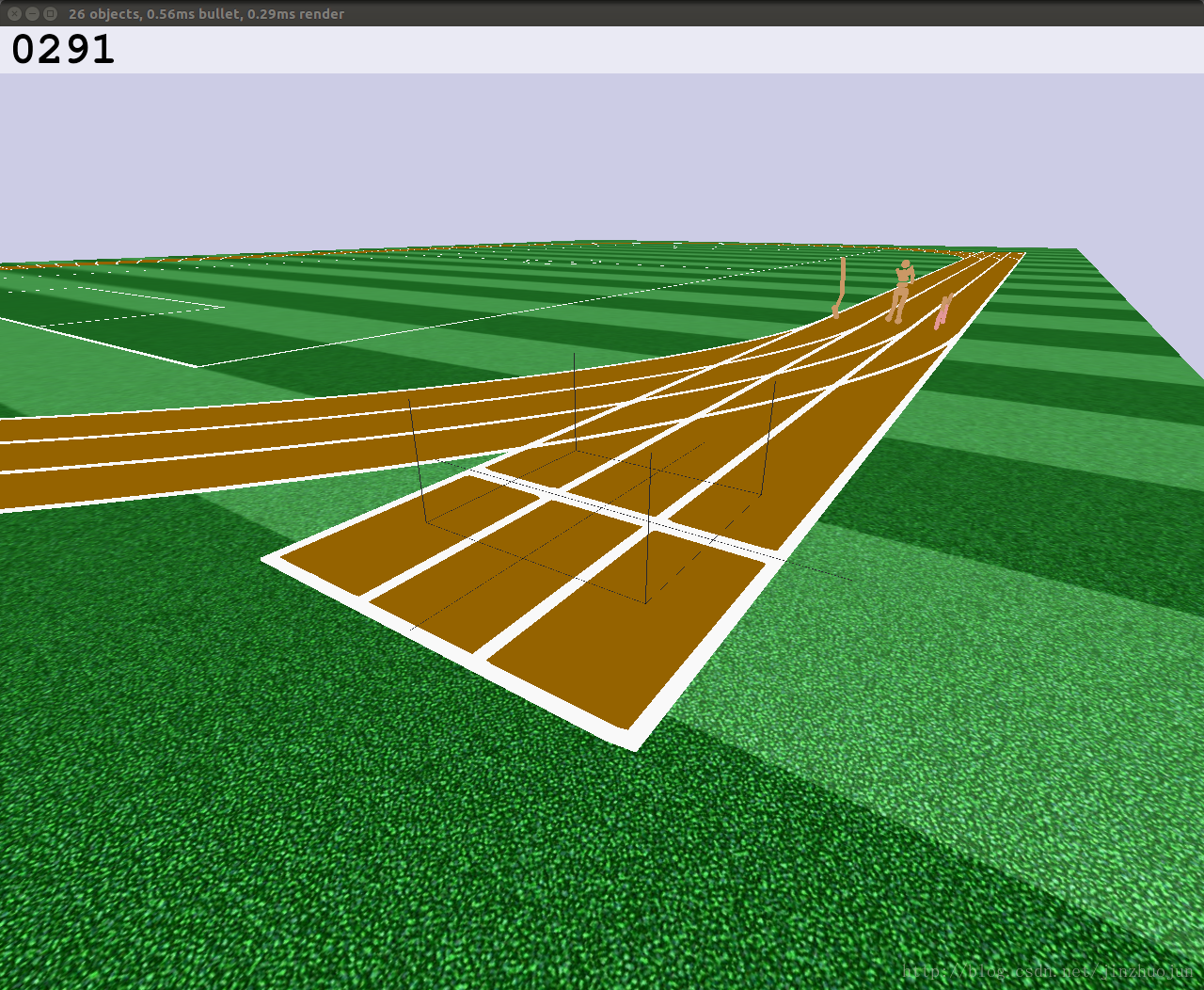
Roboschool
MuJoCo在许多的DRL论文中被用于经典的控制场景实验。但它有个缺点是要钱(除了30天免费版及学生版)。而这个缺点对于我们穷人来说可以说是致命的。作为MuJoCo实现的替代品,OpenAI开发了基于Bullet物理引擎的Roboschool。它提供了OpenAI Gym形式的接口用于模拟机器人控制。目前包含了12个环境。其中除了传统的类似MuJoCo的场景,还有交互控制,及多智能体控制场景。
安装方法比较简单,基本按github上readme即可。比如运行下面例子:
python $ROBOSCHOOL_PATH/agent_zoo/demo_race2.py后的效果:
如果你不幸遇到下面的问题:
jzj@jlocal:~/source/roboschool$ python $ROBOSCHOOL_PATH/agent_zoo/RoboschoolHumanoidFlagrun_v0_2017may.py
[2017-10-28 21:56:26,100] Making new env: RoboschoolHumanoidFlagrun-v1
QGLShaderProgram: could not create shader program
bool QGLShaderPrivate::create(): Could not create shader of type 2.
python3: render-simple.cpp:250: void SimpleRender::Context::initGL(): Assertion `r0' failed.
Aborted (core dumped) 根据https://github.com/openai/roboschool/issues/15中描述是一个已知bug,有个WR是在脚本前面加上from OpenGL import GLU。
Multi-Agent Particle Environment
多智能体粒子世界。主要用于多智能体场景下的DRL相关研究。项目不大,依赖也比较简单,基本只要OpenAI gym。安装方法:
pip3 install -e . --user然后就可以运行了:
bin/interactive.py --scenario <env>其中<env>在其readme中有列。比如:
bin/interactive.py --scenario simple_push.py
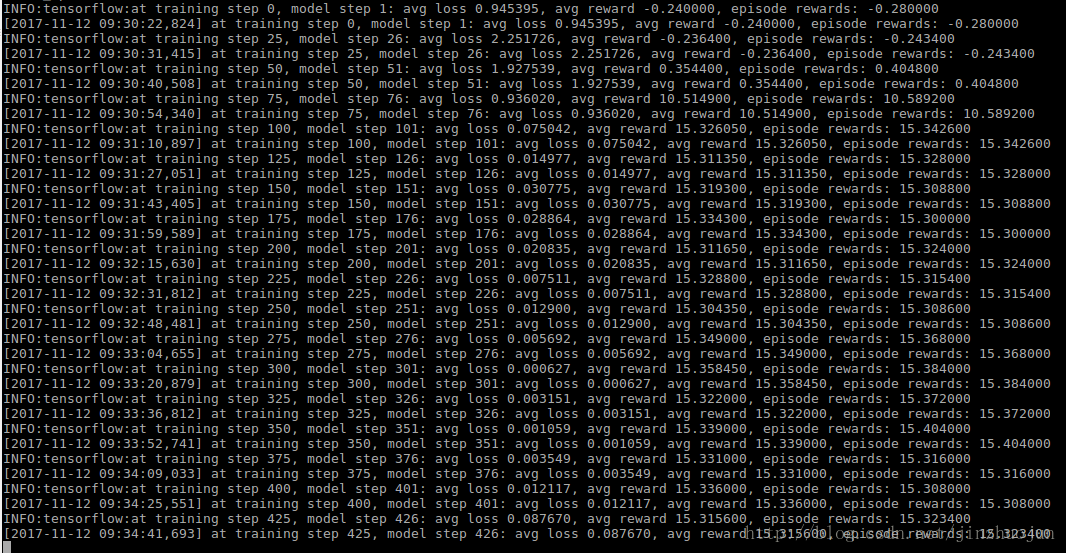
TensorFlow Models
这是TensorFlow models中提供的强化学习算法集。环境搭建比较简单,如果已经装了OpenAI Gym和MuJoCo,基本装完了TensorFlow就可以跑。建议拿python 2.7跑,拿3.x要改些东西,比较麻烦。
装完后跑个readme中的例子试下:
python trainer.py --logtostderr --batch_size=400 --env=DuplicatedInput-v0 \
--validation_frequency=25 --tau=0.1 --clip_norm=50 \
--num_samples=10 --objective=urex看到下面这样的输出就是在训练了:
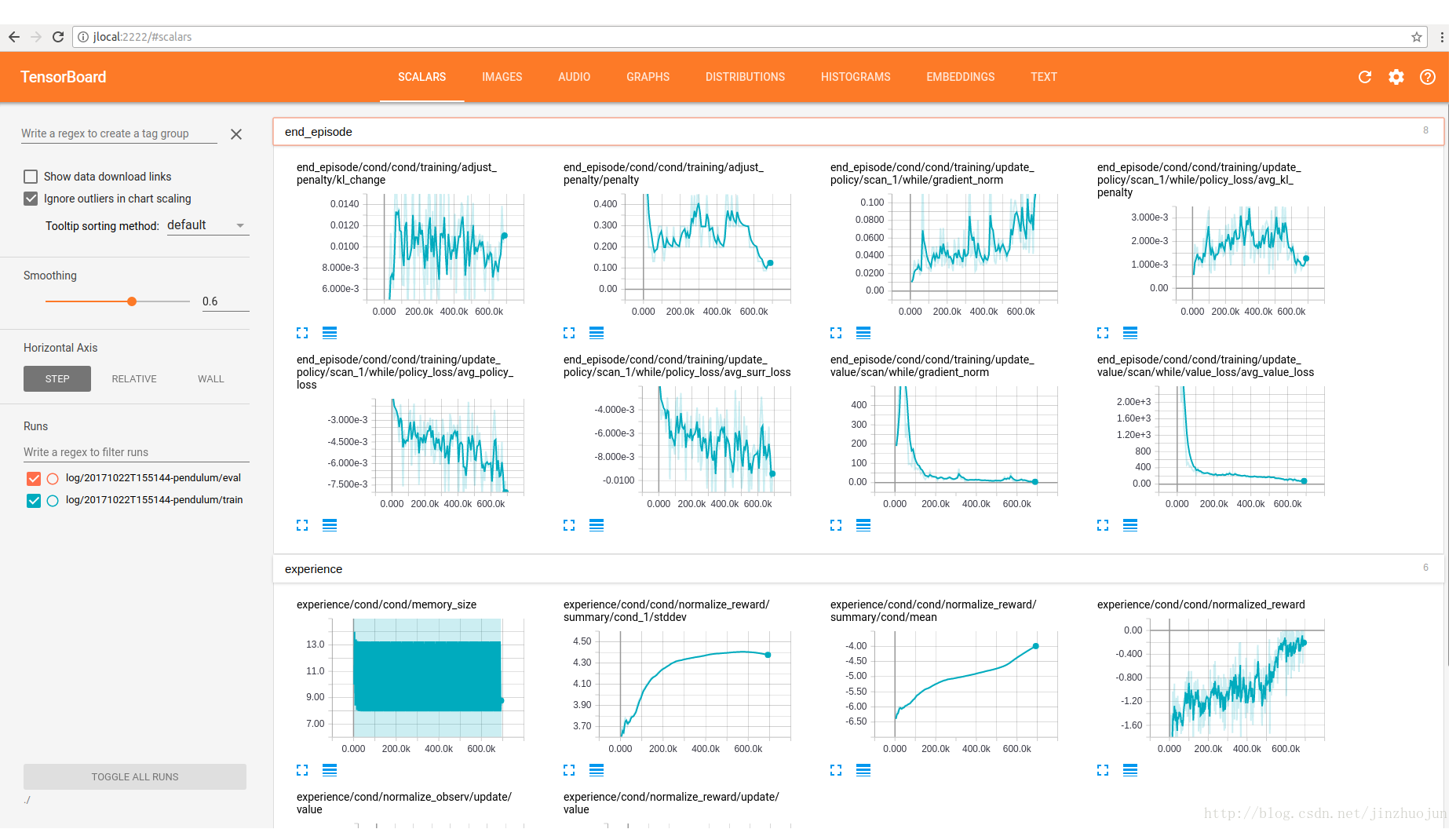
TensorFlow Agents
由Google两位研究员研发,用于在TensorFlow中构建并行强化学习算法。比较大的特点是容易开发并行强化学习算法。除了TensorFlow和OpenAI Gym,还需要安装ruamel.yaml:
pip install ruamel.yaml按readme可以运行下例子:
$ python3 -m agents.scripts.train --logdir=./log --config=pendulum
$ tensorboard --logdir=./ --port=2222 利用TensorFlow的tensorboard可以看到训练过程数据的图形化显示:
Universe
OpenAI出品,用于衡量和训练游戏中的AI的软件平台。特点之一是可以让一个现有的程序变为OpenAI Gym环境,而且不用改动程序的内部代码和API。它将程序封装成docker容器,然后以人类的使用接口(键盘鼠标,屏幕输出)提供给AI学习模块。目前已经包含了1000+环境 。
该框架可以运行在Linux和OSX上,支持Python 2.7和3.5。官方readme里说内部用的3.5,所以python 3.5的支持应该会好些。注意它会用到docker(比如那些游戏会run在container中,然后通过VNC显示),所以需要先安装docker。docker安装可参见:https://docs.docker.com/engine/installation/linux/docker-ce/ubuntu/
跑起readme中flashgames.DuskDrive-v0的例子后可以看到如下输出:
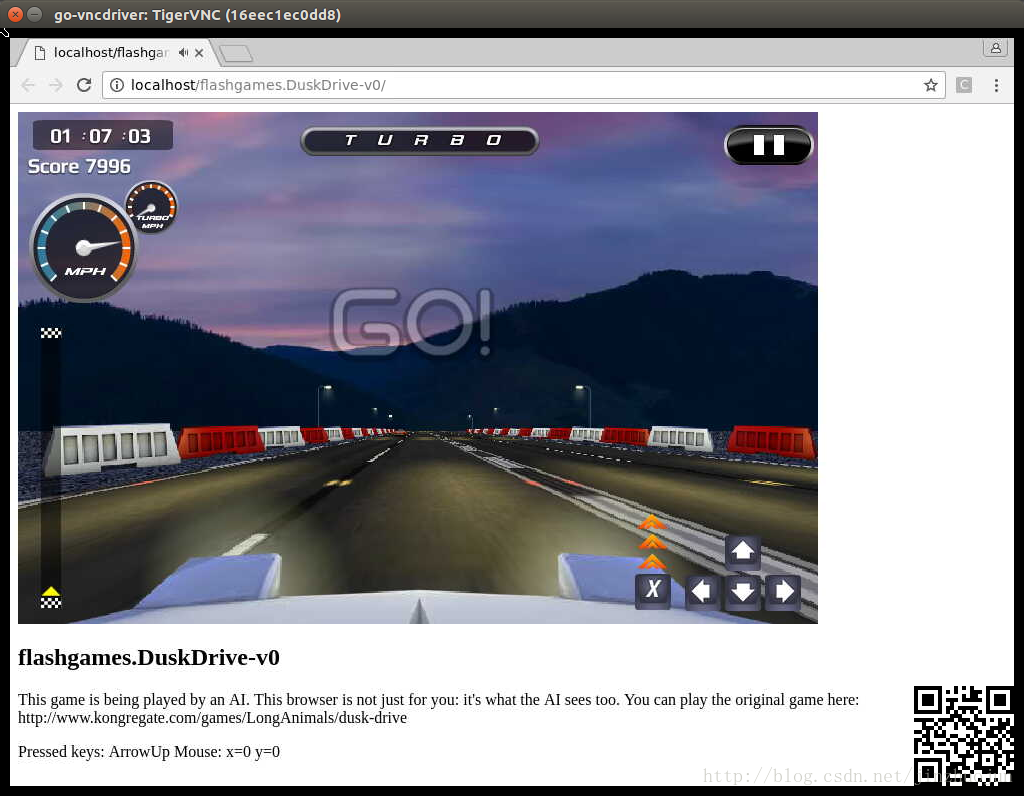
另外universe-starter-agent项目实现了一个用于universe环境中的agent,包含了A3C算法的实现。
ELF
其特点如其名字,可扩展(Extensive),轻量(Lightweight)和灵活(Flexible)。它特点之一是可以让多个游戏实例并行执行。另外任何C++接口的游戏都可以通过wrapper接入到该框架中。目前支持MiniRTS(一个简化版即时策略游戏)及其扩展、Atari和围棋。引擎部分用C++部分实现,接口为python。
环境搭建只要运行readme中的install脚本即可。此外注意还需要用到tbb(Intel的并行编程库):
sudo apt-get install libtbb-dev 比较特殊的是需要依赖PyTorch。可能由于我的网络非常之渣,用conda命令安装非常之慢:
conda install pytorch cuda80 -c soumith 建议你也可以选择在http://pytorch.org/上选择你的环境和想要的安装方式,比如:
pip3 install http://download.pytorch.org/whl/cu80/torch-0.2.0.post3-cp35-cp35m-manylinux1_x86_64.whl
pip3 install torchvision安装完后,根据readme,可以运行下几个例子试下:
sh ./train_minirts.sh --gpu 0 # 训练MiniRTS训练过程很吃资源,其它事就别干了,换台电脑或者去喝杯咖啡吧。训练过程产生的模型文件会存为save-xxx.bin的形式。假设为save-2245.bin。然后可以用下面的脚本做模型的evaluation:
sh eval_minirts.sh ./save-2245.bin 20 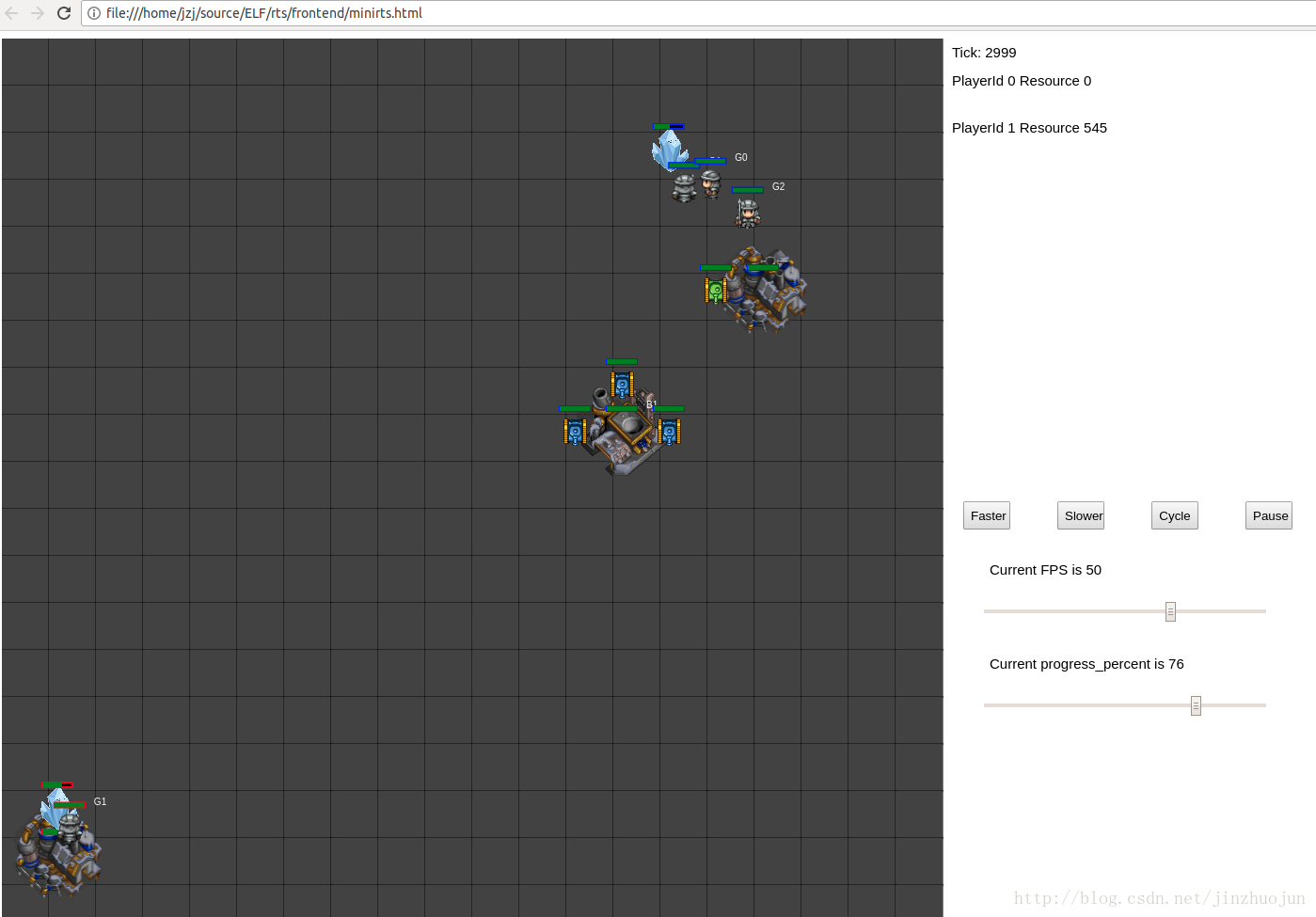
如果要进行self-play(机器人自己和自己玩)可以执行下面的脚本:
sh ./selfplay_minirts.sh ./save-2245.bin 如果在运行eval或者self-play脚本时加上参数–save_replay_prefix replay,会生成一坨replayXXX-X.rep的重放文件。它们类似于以前玩的星际或者帝国中存档文件,可以用于重放。
下面是运行中可能碰到的问题及可以一试的解决方法:
Q: RuntimeError: cuda runtime error (10) : invalid device ordinal at torch/csrc/cuda/Module.cpp:87
A:这是因为selfplay_minirts.sh中默认整了多块GPU(–gpu 2)。我只有一块,改为–gpu 0即可。
Q: 在执行eval_minirts.sh时出错错误:
ValueError: Batch[actor1-5].copy_from: Reply[V] is not assigned
A: 在eval_minirts.sh中加参数–keys_in_reply V
Coach
由Intel收购的Nervana公司推出。该公司主要产品 是深度学习框架neon(不是arm上并行指令那个。。。)。Coach是一个基于Python语言的强化学习研究框架,并且包含了许多先进算法实现。该框架基于OpenAI Gym。其特色之一是可以方便地实现并行算法,充分利用CPU多核。另外有图形化工具可以方便地看训练过程中各项指标的曲线。它支持双后端,一个是当前大热的TensorFlow,一个是Intel自家的neon。该项目结合了Intel优化版本的TensorFlow和自家的神经网络加速库mkl-dnn,相信高性能是它的一个目标。
该框架要求Python 3.5。首先运行自带安装脚本:
./install.sh这个脚本会让输入一系列选项,其中如果选了要安装neon的话会去下mkl-dnn的库,我这下载巨慢。因为这是其中backend之一,不是必选的,因此如果网络和我一样渣的可以选择不装这个。
装完后可以运行几个例子:
python3 coach.py -p CartPole_DQN -r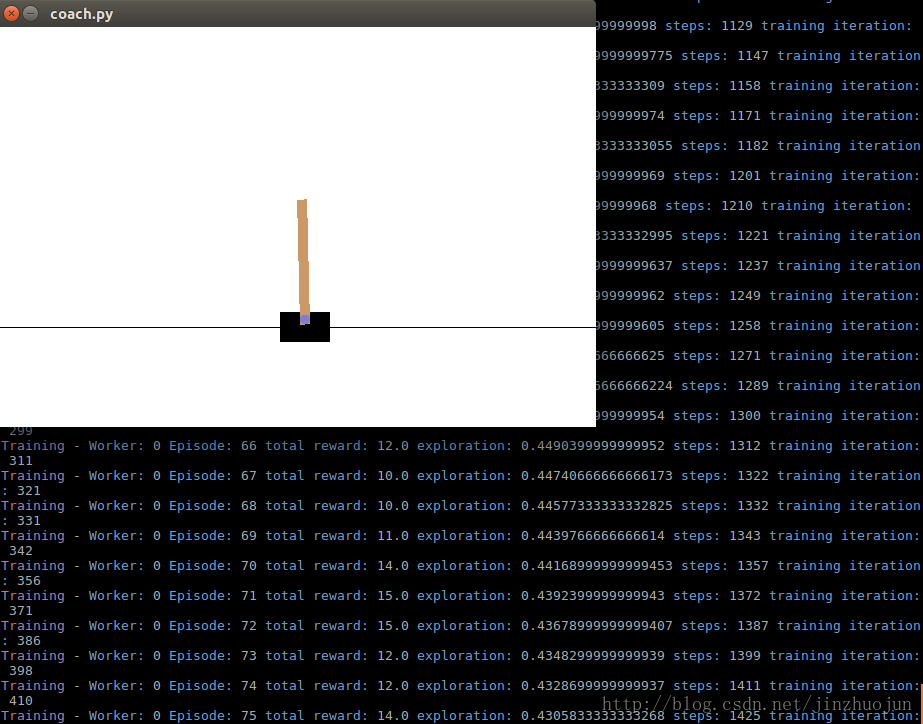
python3 coach.py -r -p Pendulum_ClippedPPO -n 8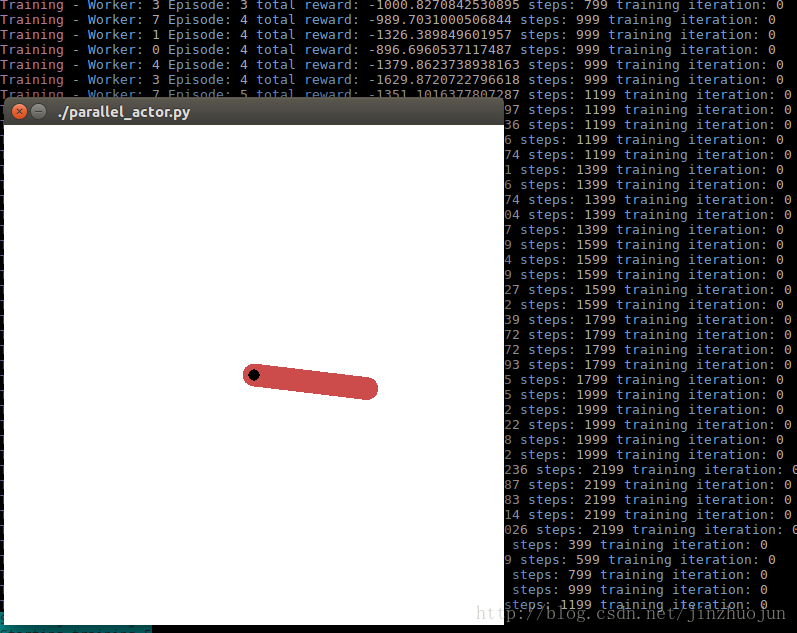
python3 coach.py -r -p MountainCar_A3C -n 8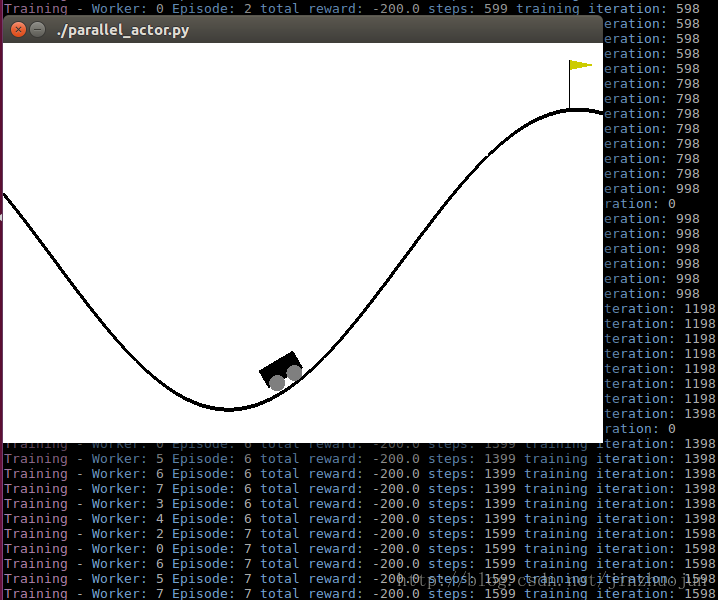
然后可以通过下面的脚本将训练过程图形化:
python3 dashboard.py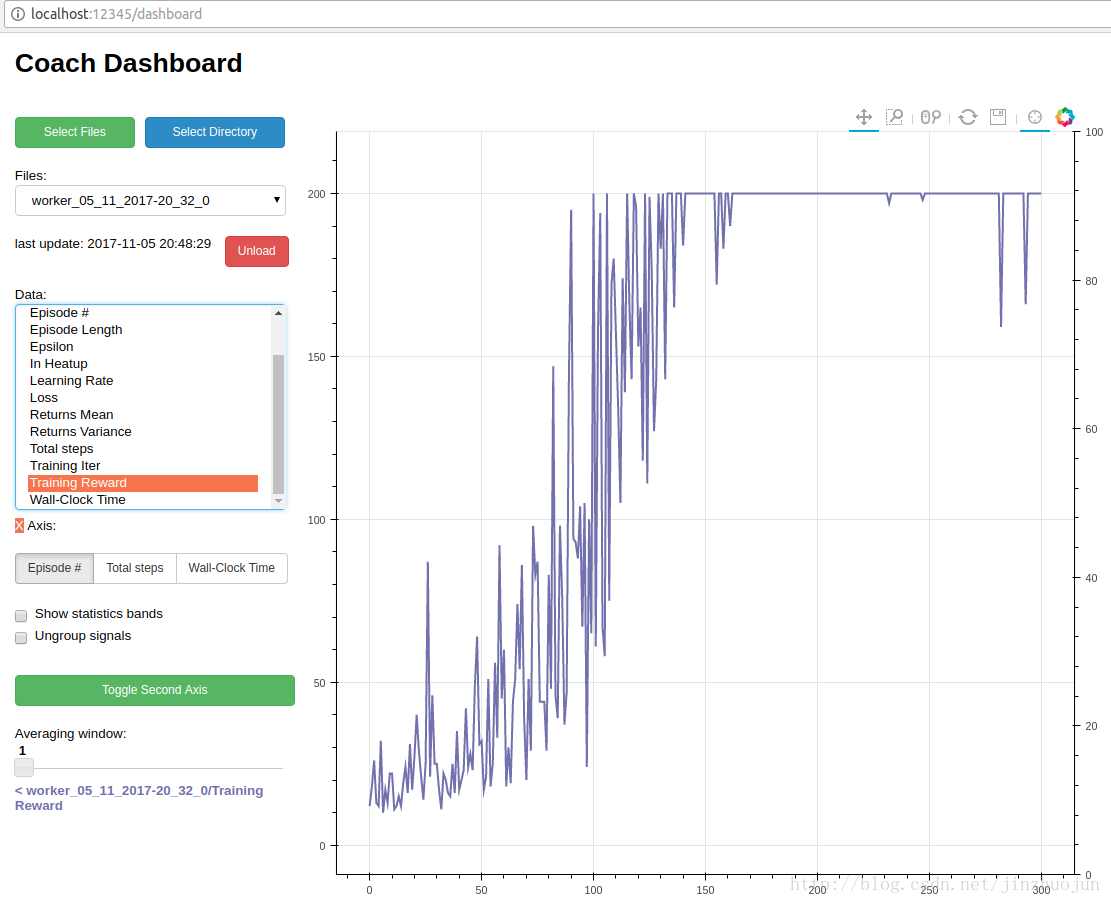
如果过程中发现少annoy模块,可以用下面命令安装下。
Q:ModuleNotFoundError: No module named ‘annoy’
A:pip3 install annoy
Unity Machine Learning Agents
大名鼎鼎的Unity公司出的。手机上的游戏很多就是基于Unity 3D引擎的。这次推出强化学习框架,它主打的是实验环境。亮点是可以结合Unity Editor来创建自定义的强化学习实验场景(详见https://github.com/Unity-Technologies/ml-agents/blob/master/docs/Making-a-new-Unity-Environment.md)。可能也是看准了现在游戏中越来越多用到AI的趋势。它主要特点是可以支持多个观察输入,多智能体支持,并行环境计算等 。python 2和3都支持。目前支持的场景有3D Balance Ball,GridWorld和Tennis(https://github.com/Unity-Technologies/ml-agents/blob/master/docs/Example-Environments.md)。算法部分就实现了PPO。因为主打是实验场景框架,算法意思一下就行。
因为我的工作环境基本都是Linux下的,而这个框架依赖的Unity SDK只支持Windows和Mac OS X。木有钱买水果,也实在打不起精神在Windows下搭环境,所以这个平台我没试过。大家有兴趣可以搭起来玩下。各种DRL的论文里都是Gym, MuJoCo,Torcs,DeepMind Lab这些,要是整些这个项目里的几个场景上去,或者自定义个场景,应该也挺让人新鲜的。


















 320
320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}