









Overview
对于二值图像来说,每个像素点的值只有类似0/1的两种可能性,一般为0(黑)/255(白)。
如果两个像素点位置相邻且取值相同,那么这两个像素点即处于同一个相互连通的区域内。
从视觉上看,彼此连通的点形成了一个区域,而该区域中所有连通点构成的集合,我们称之为一个连通区域。
在图像中,每个像素当以自身为中心时,周围一般存在8个邻接像素。
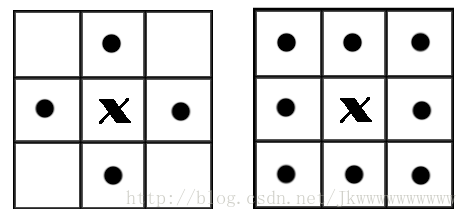
在判断两个像素是否属于同一连通区域时,根据邻接关系,通常存在两种判定方法:4连通或8连通。
4连通只考虑4个邻接像素,即上下左右,如下左图所示;
8连通则总共考虑8个邻接像素,额外还包括了对角线位置的点,如下右图所示。
值得注意的是,二值连通区域还具有简单而特殊的传递性:
如果像素点A与像素点B同值并邻接,我们称A与B连通,易得,
如果A与B连通,B与C连通,则A亦与C连通。
一个连通区域可能包含很多个像素点,而如果将同一个连通区域的所有像素点都用同一个数值/符号来进行标记,这个过程就成为连通区域标记。
Label
SciKit-Image是一种Python下的图像处理工具包,scikit-image — Image processing in Python:Official Site
在skimage包中,使用measure子模块下的label函数即可实现连通区域标记。
参数input表示需要处理的二值图像,connectivity表示判定连通的模式(1代表4连通,2代表8连通),输出labels为一个从0开始的标记数组。
skimage.measure.label(input, neighbors = None, background = None, return_num = False, connectivity = None)[source]
Parameters:
@input : Image to label [ndarray of dtype int]
@neighbors : Deprecated, use @connectivity instead [{4, 8}, int, optional]
@background : Consider all pixels with this value as background pixels, and label them as 0. By default, 0-valued pixels are considered as background pixels. [int, optional]
@return_num : Whether to return the number of assigned labels [bool, optional]
@connectivity : Maximum number of orthogonal hops to consider a pixel/voxel as a neighbor. Accepted values are ranging from 1 to input.ndim. If None, a full connectivity of input.ndim is used. [int, optional]
Returns:
@labels : Labeled array, where all connected regions are assigned the same integer value. [ndarray of dtype int]
@num : Number of labels, which equals the maximum label index and is only returned if return_num is True. [int, optional]
Examples:
>>> import numpy as np
>>> x = np.eye(3).astype(int)
>>> print(x)
[[1 0 0]
[0 1 0]
[0 0 1]]
>>> print(label(x, connectivity = 1))
[[1 0 0]
[0 2 0]
[0 0 3]]
>>> print(label(x, connectivity = 2))
[[1 0 0]
[0 1 0]
[0 0 1]]
>>> print(label(x, background = -1))
[[1 2 2]
[2 1 2]
[2 2 1]]
>>> x = np.array([[1, 0, 0],
... [1, 1, 5],
... [0, 0, 0]])
>>> print(label(x))
[[1 0 0]
[1 1 2]
[0 0 0]]Properties
此外,使用measure子模块中的regionprops()函数可以很方便地对每一个连通区域进行属性获取和操作,比如计算面积、外接矩形、凸包面积等等。
计算结果返回为所有连通区域的属性列表,列表长度为连通区域个数(第i个连通区域的attribute属性可以通过properties[i].attribute获取)。
skimage.measure.regionprops(label_image, intensity_image = None, cache = True)[source]
Parameters:
@label_image : Labeled input image. Labels with value 0 are ignored. [(N, M) ndarray]
@intensity_image : Intensity (i.e., input) image with same size as labeled image. Default is None. [(N, M) ndarray, optional]
@cache : Determine whether to cache calculated properties. The computation is much faster for cached properties, whereas the memory consumption increases. [bool, optional]
Returns:
@properties : Each item describes one labeled region, and can be accessed using the attributes listed below. [list of RegionProperties]
Property Keys:
The following properties can be accessed as attributes or keys:
@area: [int] Number of pixels of region.
@bbox: [tuple] Bounding box (min_row, min_col, max_row, max_col). Pixels belonging to the bounding box are in the half-open interval [min_row; max_row) and [min_col; max_col).
@bbox_area: [int] Number of pixels of bounding box.
@centroid: [array] Centroid coordinate tuple (row, col).
@convex_area: [int] Number of pixels of convex hull image.
@convex_image: [(H, J) ndarray] Binary convex hull image which has the same size as bounding box.
@coords: [(N, 2) ndarray] Coordinate list (row, col) of the region.
@eccentricity: [float] Eccentricity of the ellipse that has the same second-moments as the region. The eccentricity is the ratio of the focal distance (distance between focal points) over the major axis length. The value is in the interval [0, 1). When it is 0, the ellipse becomes a circle.
@equivalent_diameter: [float] The diameter of a circle with the same area as the region.
@euler_number: [int] Euler characteristic of region. Computed as number of objects (= 1) subtracted by number of holes (8-connectivity).
@extent: [float] Ratio of pixels in the region to pixels in the total bounding box. Computed as area / (rows * cols)
@filled_area: [int] Number of pixels of filled region.
@filled_image: [(H, J) ndarray] Binary region image with filled holes which has the same size as bounding box.
@image: [(H, J) ndarray] Sliced binary region image which has the same size as bounding box.
@inertia_tensor: [(2, 2) ndarray] Inertia tensor of the region for the rotation around its mass.
@inertia_tensor_eigvals: [tuple] The two eigen values of the inertia tensor in decreasing order.
@intensity_image: [ndarray] Image inside region bounding box.
@label: [int] The label in the labeled input image.
@local_centroid: [array] Centroid coordinate tuple (row, col), relative to region bounding box.
@major_axis_length: [float] The length of the major axis of the ellipse that has the same normalized second central moments as the region.
@max_intensity: [float] Value with the greatest intensity in the region.
@mean_intensity: [float] Value with the mean intensity in the region.
@min_intensity: [float] Value with the least intensity in the region.
@minor_axis_length: [float] The length of the minor axis of the ellipse that has the same normalized second central moments as the region.
@moments: [(3, 3) ndarray] Spatial moments up to 3rd order:
m_ji = sum{ array(x, y) * x^j * y^i }
where the sum is over the x, y coordinates of the region.
@moments_central: [(3, 3) ndarray] Central moments (translation invariant) up to 3rd order:
mu_ji = sum{ array(x, y) * (x - x_c)^j * (y - y_c)^i }
where the sum is over the x, y coordinates of the region, and x_c and y_c are the coordinates of the region’s centroid.
@moments_hu: [tuple] Hu moments (translation, scale and rotation invariant).
@moments_normalized: [(3, 3) ndarray] Normalized moments (translation and scale invariant) up to 3rd order:
nu_ji = mu_ji / m_00^[(i+j)/2 + 1]
where m_00 is the zeroth spatial moment.
@orientation: [float] Angle between the X-axis and the major axis of the ellipse that has the same second-moments as the region. Ranging from -pi/2 to pi/2 in counter-clockwise direction.
@perimeter: [float] Perimeter of object which approximates the contour as a line through the centers of border pixels using a 4-connectivity.
@solidity: [float] Ratio of pixels in the region to pixels of the convex hull image.
@weighted_centroid: [array] Centroid coordinate tuple (row, col) weighted with intensity image.
@weighted_local_centroid: [array] Centroid coordinate tuple (row, col), relative to region bounding box, weighted with intensity image.
@weighted_moments: [(3, 3) ndarray] Spatial moments of intensity image up to 3rd order:
wm_ji = sum{ array(x, y) * x^j * y^i }
where the sum is over the x, y coordinates of the region.
@weighted_moments_central: [(3, 3) ndarray] Central moments (translation invariant) of intensity image up to 3rd order:
wmu_ji = sum{ array(x, y) * (x - x_c)^j * (y - y_c)^i }
where the sum is over the x, y coordinates of the region, and x_c and y_c are the coordinates of the region’s weighted centroid.
@weighted_moments_hu: [tuple] Hu moments (translation, scale and rotation invariant) of intensity image.
@weighted_moments_normalized: [(3, 3) ndarray] Normalized moments (translation and scale invariant) of intensity image up to 3rd order:
wnu_ji = wmu_ji / wm_00^[(i+j)/2 + 1]
where wm_00 is the zeroth spatial moment (intensity-weighted area).
Examples:
>>> from skimage import data, util
>>> from skimage.measure import label
>>> img = util.img_as_ubyte(data.coins()) > 110
>>> label_img = label(img, connectivity = img.ndim)
>>> props = regionprops(label_img)
>>> # centroid of first labeled object
>>> props[0].centroid
(22.729879860483141, 81.912285234465827)
>>> # centroid of first labeled object
>>> props[0]['centroid']
(22.729879860483141, 81.912285234465827)Reference
[1] skimage.measure.label — skimage v0.13dev docs
[2] skimage.measure.regionprops — skimage v0.13dev docs
[3] python数字图像处理(18):高级形态学处理
[4] 图像分析:二值图像连通域标记
希望能够对大家有所帮助

















 3743
3743

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









