







在视频跟踪处理中,预测目标运动轨迹是一项基本任务。目标运动状态估计的目的有三个:一是对目标过去的状态进行平滑;二是对目标现在的运动状态进行滤波;三是对目标未来的运动状态进行预测。物体的运动状态一般包括目标位置、速度、加速度等。著名的Kalman滤波技术就是其中一种,这是一种线性系统估计技术。
OpenCV中自带了kalman滤波的代码和例程,可参照kalman.cpp,它存在于类KalmanFilter中。kalman滤波算法的调用比较方便,主要的难点是了解多个参数和矩阵计算公式。一个总体的思路是,需要了解前一时刻的状态估计值x和当前的观测值y,然后建立状态方程和观测方程。经过一些运算后即可预测下一步的状态。
一、离散时间线性动态系统的状态方程
Kalman滤波利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。一个线性系统是采用状态方程、观测方程及其初始条件来描述。线性离散时间系统的一般状态方程可描述为:

其中, 
二、传感器的观测方程
传感器的通用观测方程为:

这里, 是传感器在 
三、初始状态的描述
初始状态 



以上的描述比较抽象,因此记录一个例子加以说明:
例:目标沿x轴作匀速直线运动,过程噪声为速度噪声,试写出目标的状态方程。
解:由题意知,目标的状态为:
用T表示时间间隔,ux表速度噪声,则有:
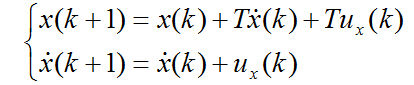
写成矩阵形式为:

令:

则有:

其中:


在OpenCV中自带的例程里面描述了一个一维的运动跟踪,该点在一个圆弧上运动,只有一个自由度即角度。因此只需建立匀速运动模型即可。
例程的路径:C:\opencv\sources\samples\cpp\kalman.cpp
在代码中各变量的对应情况如下:
状态估计值X对应:state
当前观测值Z对应:measurement
KalmanFilter类内成员变量transitionMatrix即为状态转移方程中的矩阵A
KalmanFilter类内成员变量measurementMatrix即为量测方程中矩阵C
Mat statePre; //!< predicted state (x'(k)): x(k)=A*x(k-1)+B*u(k)
Mat statePost; //!< corrected state (x(k)): x(k)=x'(k)+K(k)*(z(k)-H*x'(k))
Mat transitionMatrix; //!< state transition matrix (A)
Mat controlMatrix; //!< control matrix (B) (not used if there is no control)
Mat measurementMatrix; //!< measurement matrix (H)
Mat processNoiseCov; //!< process noise covariance matrix (Q)
Mat measurementNoiseCov;//!< measurement noise covariance matrix (R)
Mat errorCovPre; //!< priori error estimate covariance matrix (P'(k)): P'(k)=A*P(k-1)*At + Q)*/
Mat gain; //!< Kalman gain matrix (K(k)): K(k)=P'(k)*Ht*inv(H*P'(k)*Ht+R)
Mat errorCovPost; //!< posteriori error estimate covariance matrix (P(k)): P(k)=(I-K(k)*H)*P'(k) 以下是OpenCV/modules/video/src/Kalman.cpp的源代码,后续需继续分析这些代码:
/*M///
//
// IMPORTANT: READ BEFORE DOWNLOADING,  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









