




 本文介绍了一种基于FPGA实现Sobel边缘检测的方法。通过设计特定的窗口结构和利用状态机控制,实现了图像的高效处理。文章详细阐述了FPGA上Sobel算法的具体实现过程。
本文介绍了一种基于FPGA实现Sobel边缘检测的方法。通过设计特定的窗口结构和利用状态机控制,实现了图像的高效处理。文章详细阐述了FPGA上Sobel算法的具体实现过程。
本博文参考了《FPGA嵌入式图像处理系统设计》一书。该书的英文版下载链接:http://download.csdn.net/detail/lzy272942518/6949349
窗处理是图像处理中常见的一种处理,它的思想是对于图像矩阵,通过一个固定大小(例如3*3)的小矩阵对图像进行运算操作。常用的窗处理包括Sobel边缘检测,形态学操作,模糊滤波,高斯滤波等。在基于PC的图像处理领域,可以方便的实现窗处理操作。比如,在opencv库中可以自己随意构建窗口大小,然后调用相关的函数实现窗处理。
FPGA是一种可定制的逻辑电路,它拥有并行的结构特征,在设计上能实现硬件并行和流水线技术,可以实现算法的加速,而且性价比较高。本文即根据Sobel算法的理论,结合FPGA的结构特征,在FPGA上设计并尝试实现了Sobel窗处理算法方案。
Sobel边缘检测的思想是:该算子包含两组3 x 3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度查分近似值。如果以A代表原始图像,Gx及Gy分别代表经纵向向及横向边缘检测的图像,其公式如下(来源于百度图片):

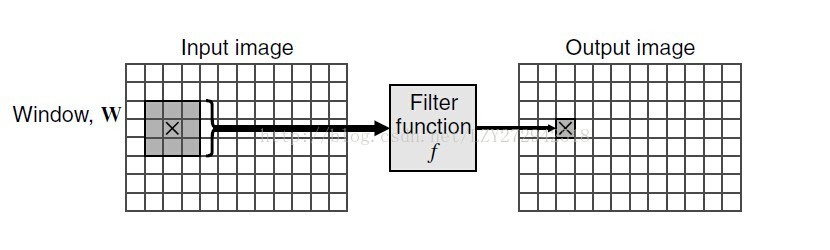
对于FPGA实现Sobel,首先,是检测窗的实现。这种窗扩展了点运算,以一个局部邻域或窗口内像素值的函数运算结果作为输出:
Q[x,y] = f(I[x,y],...,I[x+△x,y+△y]), (△x,△y)∈W
其中,W是I[x,y]为中心的窗口。以3×3大小的窗口为例,如图所示:
Sobel算子所需的窗口大小为3×3。在设计过程中,窗口应当满足以下要求:
1.能同时对窗口中所有的元素进行并行操作。
2.窗口采用流水的形式遍历整个图像。
设计的思路是:因为窗口在遍历图像过程中,每一个像素都会被窗口多次使用,因此需要通过缓存来存储像素,使得它们能在后续的窗口位置被重复利用。在FPGA中,可以设计3个单口行缓存(linebuffer),借助状态机和列计数值实现这种窗口,采用流水处理的方法,实现加速计算。如图为窗口结构:

其中状态信号用环形计数器来实现(计数值0-2),其驱动时钟为每一行第一个像素的像素时钟。窗口的行0由3个移位寄存器组成;行1——行2由状态机决定和行缓存的对应关系。窗口的控制逻辑如表1所示:
表1 窗口的控制逻辑
|
输入行 |
状态 |
行缓存0 |
行缓存1 |
行缓存2 |
输出行 |
|
0 |
0 |
写 |
(行2) |
(行1) |
(空) |
|
1 |
1 |
行1 |
写 |
(行2) |
(空) |
|
2 |
2 |
行2 |
行1 |
写 |
1 |
|
3 |
0 |
写 |
行2 |
行1 |
2 |
|
4 |
1 |
行1 |
写 |
行2 |
3 |
|
5 |
2 |
行2 |
行1 |
写 |
4 |
|
6 |
0 |
写 |
行2 |
行1 |
5 |
|
|
…… |
…… |
…… |
…… |
…… |
(注:行x对应窗口结构中的行x)
对于窗口操作,存在的一个问题是边界部分无法得到处理。不过,本系统的窗口比较小,那么边界像素的输出可以不计算。这样输出的图像比输入图像减小了1行和1列,并不会影响图像显示效果。
具体实现思路:
1.窗口模块:
3个行缓存,每个大小为640×8 bit;
状态机,状态信号(0-2),以每一行第一个像素时钟作为驱动状态信号的时钟;
3个移位寄存器,每个大小为8 bit,作为检测窗口的第一行
窗口的实现,需要建立一个像素时钟驱使的always块,根据窗口结构和表1的控制逻辑,构造窗口;
2.边缘判断模块:
通过窗口可在像素点P处得到以其为中心,周围8个点的像素值。根据Sobel算子结构,进行计算。设置一个阈值,当计算后的值大于此阈值时,判定此像素为边缘。
关键部分代码(verilog):
always@(posedge PCLK)begin//产生行时钟,作为状态机驱动时钟
begin
if(VtcHCnt==0)
Line_CLK <= 1;
else
Line_CLK <= 0;
end
end
reg[1:0] state;
initial state = 0;
always@(posedge Line_CLK)begin//产生状态计数器
if(VtcVCnt==1)
state <= 2'b00;
else begin
if(state == 2'b10)
state <= 2'b00;
else
state <= state + 1;
end
end
//定义窗口第0行的三个元素
reg[7:0]S_Window0;
reg[7:0]S_Window1;
reg[7:0]S_Window2;
//定义行缓存
reg[7:0]LineBuffer0[639:0];
reg[7:0]LineBuffer1[639:0];
reg[7:0]LineBuffer2[639:0];
always@(posedge PCLK)begin
case(state)
2'b00: begin
<span style="white-space:pre"> </span>LineBuffer0[VtcHCnt] <= GRAY;
LineBuffer1[VtcHCnt] <= LineBuffer1[VtcHCnt];
LineBuffer2[VtcHCnt] <= LineBuffer2[VtcHCnt];
S_Window0 <= GRAY;
S_Window1 <= S_Window0;
S_Window2 <= S_Window1;
if(VtcHCnt>=2&&VtcVCnt>=3)begin
if((S_Window0 + S_Window1*2 + S_Window2)>(LineBuffer1[VtcHCnt-2]+LineBuffer1[VtcHCnt-1]*2 +LineBuffer1[VtcHCnt]))
DOUT_reg <= ((S_Window0 + S_Window1*2 + S_Window2 -LineBuffer1[VtcHCnt-2]-LineBuffer1[VtcHCnt-1]*2 -LineBuffer1[VtcHCnt]))/4;
else
DOUT_reg <= (LineBuffer1[VtcHCnt-2]+LineBuffer1[VtcHCnt-1]*2 +LineBuffer1[VtcHCnt]-(S_Window0 + S_Window1*2 + S_Window2))/4;
end
end
2'b01: begin
LineBuffer1[VtcHCnt] <= GRAY;
LineBuffer0[VtcHCnt] <= LineBuffer0[VtcHCnt];
LineBuffer2[VtcHCnt] <= LineBuffer2[VtcHCnt];
S_Window0 <= GRAY;
S_Window1 <= S_Window0;
S_Window2 <= S_Window1;
if(VtcHCnt>=2&&VtcVCnt>=3)begin
if((S_Window0 + S_Window1 *2 + S_Window2)>(LineBuffer2[VtcHCnt-2]+LineBuffer2[VtcHCnt-1]*2 +LineBuffer2[VtcHCnt]))
DOUT_reg <= ((S_Window0 + S_Window1*2 + S_Window2 -LineBuffer2[VtcHCnt-2]-LineBuffer2[VtcHCnt-1] *2 -LineBuffer2[VtcHCnt]))/4;
else
DOUT_reg <= (LineBuffer2[VtcHCnt-2]+LineBuffer2[VtcHCnt-1] *2 +LineBuffer2[VtcHCnt]-(S_Window0 + S_Window1*2 + S_Window2))/4;
end
end
2'b10: begin
<span style="white-space:pre"> </span> LineBuffer2[VtcHCnt] <= GRAY;
LineBuffer0[VtcHCnt] <= LineBuffer0[VtcHCnt];
LineBuffer1[VtcHCnt] <= LineBuffer1[VtcHCnt];
S_Window0 <= GRAY;
S_Window1 <= S_Window0;
S_Window2 <= S_Window1;
if(VtcHCnt>=2&&VtcVCnt>=3)begin
if((S_Window0 + S_Window1*2 + S_Window2)>(LineBuffer0[VtcHCnt-2]+LineBuffer0[VtcHCnt-1] *2 +LineBuffer0[VtcHCnt]))
DOUT_reg <= ((S_Window0 + S_Window1*2 + S_Window2 -LineBuffer0[VtcHCnt-2]-LineBuffer0[VtcHCnt-1]*2 -LineBuffer0[VtcHCnt]))/4;
else
DOUT_reg <= (LineBuffer0[VtcHCnt-2]+LineBuffer0[VtcHCnt-1]*2 +LineBuffer0[VtcHCnt]-(S_Window0 + S_Window1*2 + S_Window2))/4;
end
end
default: begin
DOUT_reg <= DOUT_reg;
LineBuffer0[VtcHCnt] <= LineBuffer0[VtcHCnt];
LineBuffer1[VtcHCnt] <= LineBuffer1[VtcHCnt];
LineBuffer2[VtcHCnt] <= LineBuffer2[VtcHCnt];
end
endcase
end

















 745
745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









