







硬件课设选择了基于Nexys 4开发板的小车课题,也是想以此来锻炼自己并积攒一些有关于FPGA Verilog HDL方面的知识和经验。算是自己接触的第一个硬件工程吧,最终结果出来后自己还是很满意的,毕竟凝结了自己几周的心血。
好啦,话不多少,赶紧上代码上图,算是做一个记录点,自己以后回来翻到时会是怎样的感受呢。
(在设计过程中也参考了网络上许多大神的设计思想,在此致谢!)
顶层模块设计与原件清单
顶层文件是在综合了各个子模块后综合得到的控制文件,顶层模块的设计切合了模块化设计思想,方便代码的更新升级,增加了可读性。首先让我们来看一下顶层模块的RTL视图。
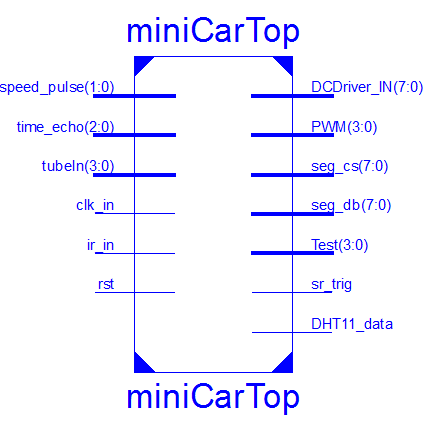
嗯,这是总体的,再看一个细化后的顶层模块。
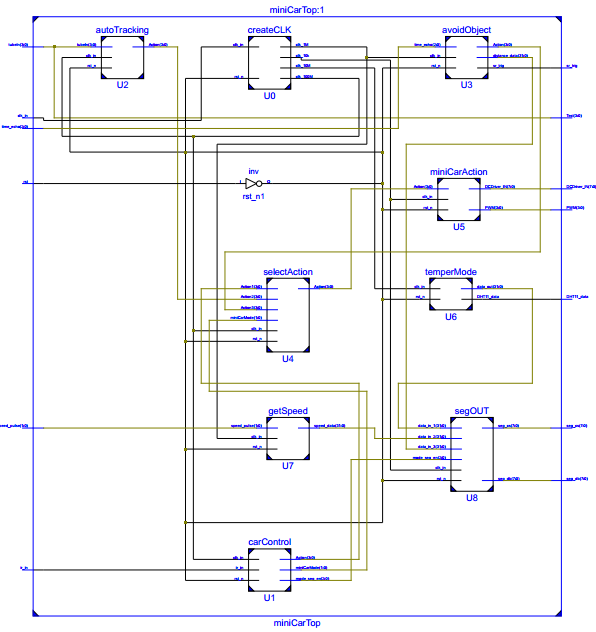
由以上可以看出顶层模块内部的构成了,其主要由时钟产生模块U0(createCLK),红外遥控U1(carControl),自动循迹U2(autoTracking),避障测距U3(avoidObject),行为选择U4(selectAction),电机驱动U5(miniCarAction),温湿度测量U6(temperMode),速度测量U7(getSpeed),数码管显示U8(segOut)一共9个模块构成。
好,介绍完总结框架后,我们来看下顶层v文件的代码部分吧,说一下,我们设计中各个模块复位低有效,而顶层模块复位高有效,故对其进行了一个取反后来连接各个模块,参考时需要注意哦。
//
// Institutions: HUST-EI-TX1105
// Designers: Tong.Liu & Weitong.Liang
//
// Create Date: 24/06/2014
// Project Name: miniCar
// Module Name: miniCarTop
// Target Devices: NEXYS 4
// Tool versions: ISE 14.6
// Description: This is a top file of all mode.
//
module miniCarTop (
clk_in,
rst,
ir_in,
time_echo,
tubeIn,
DHT11_data,
speed_pulse,
sr_trig,
DCDriver_IN,
PWM,
ring_signal,
seg_cs,
seg_db,
Test
);
input clk_in; // global input clock
input rst; // global reset signal
input[3:0] tubeIn; <span style="white-space:pre"> </span>// Four tube signal for autoTracking
input ir_in; // HongWai control input signal(PPM)
input[2:0] time_echo; // Two echo signal from ultrasonic sensor
inout DHT11_data; // Inout signal for DHT-11 sensor
input[1:0] speed_pulse; // Two Speed pulse form speed sensor
output sr_trig; // Output trig signal for ultrasonic sensor
output[7:0] DCDriver_IN; // Output signal for L298N power mode IN1 ~ IN7
output[3:0] PWM; // Output signal for L298N power mode ENA ~ END
output ring_signal; <span style="white-space:pre"> </span>// Output signal for alarm / red led
output[7:0] seg_cs; // Output cs signal for 4-7 digital seg
output[7:0] seg_db; // Output db signal for 4-7 digital seg
wire rst_n;
assign rst_n = ~rst; // rst_n low effective
wire[3:0] Action; // miniCar Action for mode miniCarAction
wire[3:0] Action1; // miniCar Action for mode carConteol
wire[3:0] Action2; // miniCar Action for mode autoTracking
wire[3:0] Action3; // miniCar Action for mode avoidObject
// create the clock signal that all mode need
wire clk_100M;
wire clk_10M;
wire clk_1M;
wire clk_10k;
createCLK U0 (
.clk_in(clk_in),
.rst_n(rst_n),
.clk_100M(clk_100M),
.clk_10M(clk_10M),
.clk_1M(clk_1M),
.clk_10k(clk_10k)
);
// Use & Link all modes
wire[1:0] miniCarMode;
wire[2:0] mode_seg_en;
carControl U1 (
.clk_in(clk_100M),
.rst_n(rst_n),
.ir_in(ir_in),
.miniCarMode(miniCarMode),
.mode_seg_en(mode_seg_en),
.Action(Action1)
);
autoTracking U2 (
.clk_in(clk_100M),
.rst_n(rst_n),
.tubeIn(tubeIn),
.Action(Action2)
);
wire[31:0] distance_data;
avoidObject U3 (
.clk_in(clk_1M),
.rst_n(rst_n),
.time_echo(time_echo),
.sr_trig(sr_trig),
.distance_data(distance_data),
.Action(Action3)
);
selectAction U4 (
.clk_in(clk_100M),
.rst_n(rst_n),
.miniCarMode(miniCarMode),
.Action1(Action1),
.Action2(Action2),
.Action3(Action3),
.Action(Action)
);
miniCarAction U5 (
.clk_in(clk_10k),
.rst_n(rst_n),
.Action(Action),
.DCDriver_IN(DCDriver_IN),
.PWM(PWM)
);
wire[31:0] temper_data;
temperMode U6 (
.clk_in(clk_10M),
.rst_n(rst_n),
.DHT11_data(DHT11_data),
.data_out(temper_data),
.ring_signal_temper(ring_signal)
);
wire[31:0] speed_data;
getSpeed U7 (
.clk_in(clk_1M),
.rst_n(rst_n),
.speed_pulse(speed_pulse),
.speed_data(speed_data)
);
segOUT U8 (
.clk_in(clk_10k),
.rst_n(rst_n),
.mode_seg_en(mode_seg_en),
.data_in_1 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2031
2031











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









