







 本文介绍了双目视觉测距的基本概念,包括视差的定义、双目视觉的四个主要步骤,以及u,v-disparity的计算。通过理解摄像机模型,解析了从世界坐标系到图像坐标系的转换,并讨论了实际情况下摄像机矩阵的变化。"
129243624,8753399,Matlab:验证图形句柄的有效性,"['Matlab', '开发语言']
本文介绍了双目视觉测距的基本概念,包括视差的定义、双目视觉的四个主要步骤,以及u,v-disparity的计算。通过理解摄像机模型,解析了从世界坐标系到图像坐标系的转换,并讨论了实际情况下摄像机矩阵的变化。"
129243624,8753399,Matlab:验证图形句柄的有效性,"['Matlab', '开发语言']
一、视差
1.视差的定义:两幅图像重叠时共轭对之间的位置差。共轭对:对应的特征点。
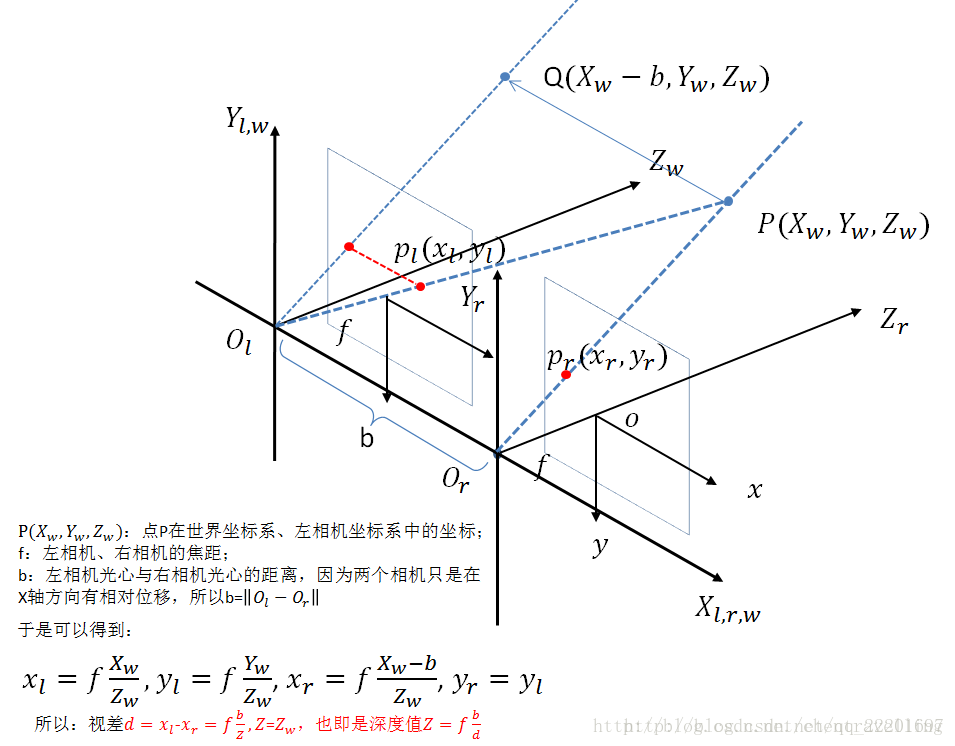
b是两个相机之间的距离,又称为基线距离。
2.双目视觉(立体视觉)测距步骤:
1)确定摄像机的相对几何位置和有关参数,即摄像机的标定(calibration);
2)寻找在两幅图像中都便于区分的特征,或用于匹配的基元;
3)把左右两幅图像中的有关特征进行匹配,即解决特征匹配的方法问题;
4)根据视差计算成像物体相对于摄像机的距离。
3.u,v disparity
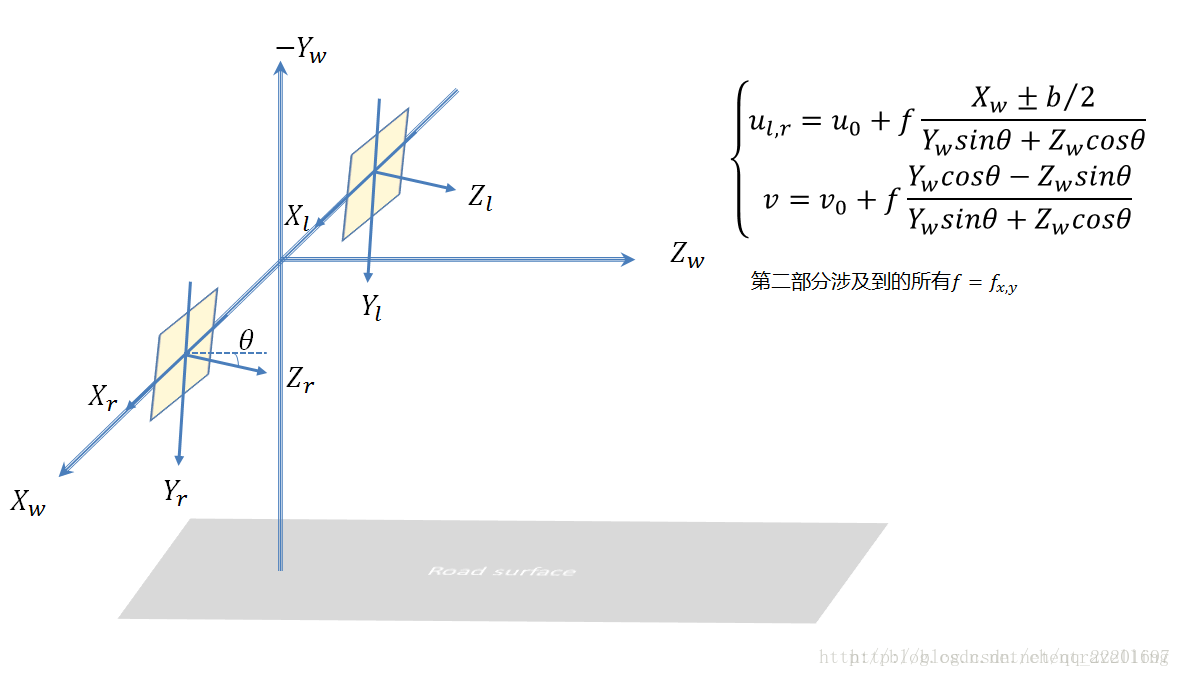
假设两台相机如上图搭设。世界坐标系(XW,YW,ZW)于两
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1502
1502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









