








 本文介绍了一种基于感知损失的快速图像风格迁移与超分辨率技术。该技术通过使用感知损失函数,能够在保持图像语义相似性的前提下,实现风格迁移和图像清晰度提升,并大幅提升了处理速度。
本文介绍了一种基于感知损失的快速图像风格迁移与超分辨率技术。该技术通过使用感知损失函数,能够在保持图像语义相似性的前提下,实现风格迁移和图像清晰度提升,并大幅提升了处理速度。
本文是参考文献[1]的笔记。该论文是Li Fei-Fei名下的论文。
引入
最近新出的图像风格转换算法,虽然效果好,但对于每一张要生成的图片,都需要初始化,然后保持CNN的参数不变,反向传播更新图像,得到最后的结果。性能问题堪忧。
但是图像风格转换算法的成功,在生成图像领域,产生了一个非常重要的idea,那就是可以将卷积神经网络提取出的feature,作为目标函数的一部分,通过比较待生成的图片经过CNN的feature值与目标图片经过CNN的feature值,使得待生成的图片与目标图片在语义上更加相似(相对于Pixel级别的损失函数)。
图像风格转换算法将图片生成以生成的方式进行处理,如风格转换,是从一张噪音图(相当于白板)中得到一张结果图,具有图片A的内容和图片B的风格。而Perceptual Losses则是将生成问题看做是变换问题。即生成图像是从内容图中变化得到。
图像风格转换是针对待生成的图像进行求导,CNN的反向传播由于参数众多,是非常慢的,同样利用卷积神经网络的feature产生的loss,训练了一个神经网络,将内容图片输入进去,可以直接输出转换风格后的图像。而将低分辨率的图像输入进去,可以得到高分辨率的图像。因为只进行一次网络的前向计算,速度非常快,可以达到实时的效果。
架构
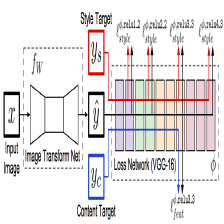
下面这个网络图是论文的精华所在。图中将网络分为Transform网络和Loss网络两种,在使用中,Transform网络用来对图像进行转换,它的参数是变化的,而Loss网络,则保持参数不变,Transform的结果图,风格图和内容图都通过Loss Net得到每一层的feature激活值,并以之进行Loss计算。

在风格转换上,输入x=yc是内容图片。而在图片高清化上,x是低分辨率图片,内容图片是高分辨率图片,风格图片未曾使用。
网络细节
网络细节的设计大体遵循DCGAN中的设计思路:
- 不使用pooling层,而是使用strided和fractionally strided卷积来做downsampling和upsampling,
- 使用了五个residual blocks
- 除了输出层之外的所有的非residual blocks后面都跟着spatial batch normalization和ReLU的非线性激活函数。
- 输出层使用一个scaled tanh来保证输出值在[0, 255]内。
- 第一个和最后一个卷积层使用9×9的核,其他卷积层使用3×3的核。
确切的网络参数值请参考文献2。
输入输出
- 对于风格转换来说,输入和输出的大小都是256×256×3。
- 对于图片清晰化来说,输出是288×288×3,而输入是288/f×288/f×3,f是压缩比,因为Transform Net是全卷积的,所以可以支持任意的尺寸。
Downsampling and Upsampling
- 对于图片清晰化来说,当upsampling factor是f的时候,使用后面接着log2f个stride为1/2卷积层的residual blocks.
- fractionally-strided卷积允许网络自己学习一个upsampling函数出来。
- 对于风格转换来说,使用2个stride=2的卷积层来做downsample,每个卷积层后面跟着若干个residual blocks。然后跟着两个stride=1/2的卷积层来做upsample。虽然输入和输出相同,但是这样有两个优点:
- 提高性能,减少了参数
- 大视野,风格转换会导致物体变形,因而,结果图像中的每个像素对应着的初始图像中的视野越大越好。
Residual Connections
残差连接可以帮助网络学习到identify function,而生成模型也要求结果图像和生成图像共享某些结构,因而,残差连接对生成模型正好对应得上。
损失函数
同图像风格转换算法类似,论文定义了两种损失函数。其中,损失网络都使用在ImageNet上训练好的VGG net,使用φ来表示损失网络。
Feature Reconstruction Loss

- j表示网络的第j层。
- CjHjWj表示第j层的feature_map的size
使用不同层的重建效果如下:

Style Reconstruction Loss
对于风格重建的损失函数,首先要先计算Gram矩阵,

产生的feature_map的大小为CjHjWj,可以看成是Cj个特征,这些特征两两之间的内积的计算方式如上。

两张图片,在loss网络的每一层都求出Gram矩阵,然后对应层之间计算欧式距离,最后将不同层的欧氏距离相加,得到最后的风格损失。
不同层的风格重建效果如下:

Simple Loss Function
- Pixel Loss,像素级的欧氏距离。
- Total Variation Regularization,是之前feature inversion和super resolution工作中使用的损失,具体还需参考论文的参考论文[6,20,48,49]
Loss对比

在图像风格转换任务上,针对不同分辨率的图像,Loss值在Perceptual Loss(ours)和图像风格转换([10])以及内容图片上的。
可以看到,使用Perceptual Loss相当于原始算法迭代50到100次。
而就时间来看:

可以提升几百倍,在GPU上0.0015s可以达到相当的效果,在CPU上更具实用性。
效果图
风格转换



虽然风格转换是在256的图片上训练的,但也可以应用到其他size上,比如512的

图片超清
4倍清晰度提升:


8倍清晰度提升:

总结
贡献当然就是图像风格转换的实用化:
- 速度三个量级的提升。
- fully convolutional network可以应用于各种各样的尺寸。
参考文献
- Perceptual Losses for Real-Time Style Transfer and Super-Resolution.
- Perceptual Losses for Real-Time Style Transfer and Super-Resolution: Supplementary Material

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









