







 本文详细介绍了对极几何中的核心概念,包括Essential Matrix(E)和Fundamental Matrix(F)。E矩阵通过旋转矩阵R和平移向量T描述两个摄像头之间的相对位置,并用于表示对极线约束;F矩阵则考虑了摄像头内参,用于像素坐标系中的对极约束。同时,提到了OpenCV中相关计算方法,但未深入探讨具体实现细节。
本文详细介绍了对极几何中的核心概念,包括Essential Matrix(E)和Fundamental Matrix(F)。E矩阵通过旋转矩阵R和平移向量T描述两个摄像头之间的相对位置,并用于表示对极线约束;F矩阵则考虑了摄像头内参,用于像素坐标系中的对极约束。同时,提到了OpenCV中相关计算方法,但未深入探讨具体实现细节。





(1)Essential Matrix
如上图所示,给定一个目标点P,以左摄像头光心Ol为原点。点P相对于光心Ol的观察位置为Pl,相对于光心Or的观察位置为Pr。点P在左摄像头成像平面上的位置为pl,在右摄像头成像平面上的位置为pr。注意Pl、Pr、pl、pr 都处于摄像机坐标系,其量纲是与平移向量T相同的(pl、pr 在图像坐标系中对应的像素坐标为 ql、qr )。
假设右摄像头相对于左摄像头的相对位置关系由旋转矩阵R和平移向量T表示,则可得:Pr = R(Pl-T)。
现在我们要寻找由点P、Ol和Or确定的对极平面的表达式。注意到平面上任意一点x与点a的连线垂直于平面法向量n,即向量 (x-a) 与向量 n 的点积为0:(x-a)·n = 0。在Ol坐标系中,光心Or的位置为T,则P、Ol和Or确定的对极平面可由下式表示:(Pl-T)T·(Pl×T) = 0。
由Pr = R(Pl-T) 和 RT=R-1 可得:(RTPr)T·(Pl×T) = 0。
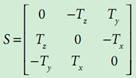
另一方面,向量的叉积又可表示为矩阵与向量的乘积,记向量T的矩阵表示为S,得:Pl×T = SPl。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}