







 本文介绍了如何在Kinect V1和V2中打开和更新骨骼帧,以及使用OpenCV绘制骨骼数据。通过对比V1的NuiSkeletonGetNextFrame方法和V2的BodyFrameSource接口,展示了V2如何利用Direct2D或OpenCV进行骨骼绘制。此外,还提供了V2与VS2012及OpenCV结合的代码示例,演示了如何获取和处理骨骼数据并实时显示。
本文介绍了如何在Kinect V1和V2中打开和更新骨骼帧,以及使用OpenCV绘制骨骼数据。通过对比V1的NuiSkeletonGetNextFrame方法和V2的BodyFrameSource接口,展示了V2如何利用Direct2D或OpenCV进行骨骼绘制。此外,还提供了V2与VS2012及OpenCV结合的代码示例,演示了如何获取和处理骨骼数据并实时显示。
~~有兴趣的小伙伴,加kinect算法交流群:462964980。
1, 打开骨骼帧的方式
对于V1,
- 方法NuiSkeletonTrackingEnable实现
- m_hNextSkeletonEvent = CreateEvent(NULL, TRUE, FALSE, NULL );
- hr =m_PNuiSensor->NuiSkeletonTrackingEnable(
- m_hNextSkeletonEvent,
- NUI_SKELETON_TRACKING_FLAG_ENABLE_IN_NEAR_RANGE//|
- );
- if( FAILED( hr ) )
- {
- cout<<"Couldnot open skeleton stream video"<<endl;
- return hr;
- }
对于V2
- // Initialize the Kinect andget coordinate mapper and the body reader
- IBodyFrameSource* pBodyFrameSource = NULL;
- hr = m_pKinectSensor->Open();
- if (SUCCEEDED(hr))
- {
- hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);
- }
- 方法get_CoordinateMapper得到坐标映射
- if (SUCCEEDED(hr))
- {
- hr =m_pKinectSensor->get_BodyFrameSource(&pBodyFrameSource);
- }
- 方法get_BodyFrameSource得到骨骼帧源
- if (SUCCEEDED(hr))
- {
- hr =pBodyFrameSource->OpenReader(&m_pBodyFrameReader);
- }
- 方法get_BodyFrameSource打开骨骼帧读取器
- SafeRelease(pBodyFrameSource);
- }
2,更新骨骼帧方式
对于V1,方法NuiSkeletonGetNextFrame实现
- NUI_SKELETON_FRAMESkeletonFrame;//骨骼帧的定义
- bool bFoundSkeleton = false;
- if(SUCCEEDED(NuiSkeletonGetNextFrame( 0, &SkeletonFrame )) )//Get the next frameof skeleton data.直接从kinect中提取骨骼帧
对于V2,
- if (!m_pBodyFrameReader)
- {
- return;
- }
- <pre name="code" class="cpp"> //更新骨骼帧
- //更新骨骼数据
- hResult = pBodyFrame->GetAndRefreshBodyData( BODY_COUNT, pBody );
3,画骨架方式:
对于V1,主要用opencv辅助来画,用到cvLine方法
例如左上肢的实现为:
- //左上肢
- if((pointSet[NUI_SKELETON_POSITION_SHOULDER_CENTER].x!=0 ||pointSet[NUI_SKELETON_POSITION_SHOULDER_CENTER].y!=0) &&
- (pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT].y!=0))
- cvLine(SkeletonImage, pointSet[NUI_SKELETON_POSITION_SHOULDER_CENTER],pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT], color, 2);
- if((pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT].y!=0) &&
- (pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT].x!=0|| pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT].y!=0))
- cvLine(SkeletonImage,pointSet[NUI_SKELETON_POSITION_SHOULDER_LEFT],pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT], color, 2);
- if((pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT].y!=0) &&
- (pointSet[NUI_SKELETON_POSITION_WRIST_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_WRIST_LEFT].y!=0))
- cvLine(SkeletonImage,pointSet[NUI_SKELETON_POSITION_ELBOW_LEFT],pointSet[NUI_SKELETON_POSITION_WRIST_LEFT], color, 2);
- if((pointSet[NUI_SKELETON_POSITION_WRIST_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_WRIST_LEFT].y!=0) &&
- (pointSet[NUI_SKELETON_POSITION_HAND_LEFT].x!=0 ||pointSet[NUI_SKELETON_POSITION_HAND_LEFT].y!=0))
- cvLine(SkeletonImage,pointSet[NUI_SKELETON_POSITION_WRIST_LEFT],pointSet[NUI_SKELETON_POSITION_HAND_LEFT], color, 2);
对于V2,主要借助Direct2D微软的图形图像API,具体详细可以查阅资料。。当然也可以转换为用opencv来画。下面用OpenCV2.4.10中drawing functions 里边的line()函数:
- line(SkeletonImage,pointSet[joint0], pointSet[joint1], color, 2);
4,V2+VS2012+OpenCV代码
- #include <Windows.h>
- #include <Kinect.h>
- #include <opencv2/opencv.hpp>
- using namespace std;
- using namespace cv;
- //释放接口需要自己定义
- template<class Interface>
- inline void SafeRelease( Interface *& pInterfaceToRelease )
- {
- if( pInterfaceToRelease != NULL ){
- pInterfaceToRelease->Release();
- pInterfaceToRelease = NULL;
- }
- }
- void DrawBone( Mat& SkeletonImage, CvPoint pointSet[], const Joint* pJoints, int whichone, JointType joint0, JointType joint1);
- void drawSkeleton( Mat& SkeletonImage, CvPoint pointSet[],const Joint* pJoints, int whichone);
- int main( int argc, char **argv[] )
- {
- //OpenCV中开启CPU的硬件指令优化功能函数
- setUseOptimized( true );
- // Sensor
- IKinectSensor* pSensor;
- HRESULT hResult = S_OK;
- hResult = GetDefaultKinectSensor( &pSensor );
- if( FAILED( hResult ) ){
- std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
- return -1;
- }
- hResult = pSensor->Open( );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IKinectSensor::Open()" << std::endl;
- return -1;
- }
- //Source
- IColorFrameSource* pColorSource;
- hResult = pSensor->get_ColorFrameSource( &pColorSource );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IKinectSensor::get_ColorFrameSource()" << std::endl;
- return -1;
- }
- IBodyFrameSource* pBodySource;
- hResult = pSensor->get_BodyFrameSource( &pBodySource );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IKinectSensor::get_BodyFrameSource()" << std::endl;
- return -1;
- }
- // Reader
- IColorFrameReader* pColorReader;
- hResult = pColorSource->OpenReader( &pColorReader );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IColorFrameSource::OpenReader()" << std::endl;
- return -1;
- }
- IBodyFrameReader* pBodyReader;
- hResult = pBodySource->OpenReader( &pBodyReader );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IBodyFrameSource::OpenReader()" << std::endl;
- return -1;
- }
- // Description
- IFrameDescription* pDescription;
- hResult = pColorSource->get_FrameDescription( &pDescription );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IColorFrameSource::get_FrameDescription()" << std::endl;
- return -1;
- }
- int width = 0;
- int height = 0;
- pDescription->get_Width( &width ); // 1920
- pDescription->get_Height( &height ); // 1080
- unsigned int bufferSize = width * height * 4 * sizeof( unsigned char );
- cv::Mat bufferMat( height, width, CV_8UC4 );
- cv::Mat bodyMat( height / 2, width / 2, CV_8UC4 );
- cv::namedWindow( "Body" );
- // Color Table
- cv::Vec3b color[BODY_COUNT];
- color[0] = cv::Vec3b( 255, 0, 0 );
- color[1] = cv::Vec3b( 0, 255, 0 );
- color[2] = cv::Vec3b( 0, 0, 255 );
- color[3] = cv::Vec3b( 255, 255, 0 );
- color[4] = cv::Vec3b( 255, 0, 255 );
- color[5] = cv::Vec3b( 0, 255, 255 );
- // Coordinate Mapper
- ICoordinateMapper* pCoordinateMapper;
- hResult = pSensor->get_CoordinateMapper( &pCoordinateMapper );
- if( FAILED( hResult ) ){
- std::cerr << "Error : IKinectSensor::get_CoordinateMapper()" << std::endl;
- return -1;
- }
- while(1){
- // Frame
- IColorFrame* pColorFrame = nullptr;
- hResult = pColorReader->AcquireLatestFrame( &pColorFrame );
- if( SUCCEEDED( hResult ) ){
- hResult = pColorFrame->CopyConvertedFrameDataToArray( bufferSize, reinterpret_cast<BYTE*>( bufferMat.data ), ColorImageFormat::ColorImageFormat_Bgra );
- if( SUCCEEDED( hResult ) ){
- cv::resize( bufferMat, bodyMat, cv::Size(), 0.5, 0.5 );
- }
- }
- //更新骨骼帧
- IBodyFrame* pBodyFrame = nullptr;
- hResult = pBodyReader->AcquireLatestFrame( &pBodyFrame );
- if( SUCCEEDED( hResult ) ){
- IBody* pBody[BODY_COUNT] = { 0 };
- //更新骨骼数据
- hResult = pBodyFrame->GetAndRefreshBodyData( BODY_COUNT, pBody );
- if( SUCCEEDED( hResult ) ){
- for( int count = 0; count < BODY_COUNT; count++ ){
- BOOLEAN bTracked = false;
- hResult = pBody[count]->get_IsTracked( &bTracked );
- if( SUCCEEDED( hResult ) && bTracked ){
- Joint joint[JointType::JointType_Count];
- hResult = pBody[ count ]->GetJoints( JointType::JointType_Count, joint );
- if( SUCCEEDED( hResult ) ){
- // Left Hand State
- HandState leftHandState = HandState::HandState_Unknown;
- hResult = pBody[count]->get_HandLeftState( &leftHandState );
- if( SUCCEEDED( hResult ) ){
- ColorSpacePoint colorSpacePoint = { 0 };
- hResult = pCoordinateMapper->MapCameraPointToColorSpace( joint[JointType::JointType_HandLeft].Position, &colorSpacePoint );
- if( SUCCEEDED( hResult ) ){
- int x = static_cast<int>( colorSpacePoint.X );
- int y = static_cast<int>( colorSpacePoint.Y );
- if( ( x >= 0 ) && ( x < width ) && ( y >= 0 ) && ( y < height ) ){
- if( leftHandState == HandState::HandState_Open ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 128, 0 ), 5, CV_AA );
- }
- else if( leftHandState == HandState::HandState_Closed ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 0, 128 ), 5, CV_AA );
- }
- else if( leftHandState == HandState::HandState_Lasso ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 128, 128, 0 ), 5, CV_AA );
- }
- }
- }
- }
- // Right Hand State
- HandState rightHandState = HandState::HandState_Unknown;
- hResult = pBody[count]->get_HandRightState( &rightHandState );
- if( SUCCEEDED( hResult ) ){
- ColorSpacePoint colorSpacePoint = { 0 };
- hResult = pCoordinateMapper->MapCameraPointToColorSpace( joint[JointType::JointType_HandRight].Position, &colorSpacePoint );
- if( SUCCEEDED( hResult ) ){
- int x = static_cast<int>( colorSpacePoint.X );
- int y = static_cast<int>( colorSpacePoint.Y );
- if( ( x >= 0 ) && ( x < width ) && ( y >= 0 ) && ( y < height ) ){
- if( rightHandState == HandState::HandState_Open ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 128, 0 ), 5, CV_AA );
- }
- else if( rightHandState == HandState::HandState_Closed ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 0, 0, 128 ), 5, CV_AA );
- }
- else if( rightHandState == HandState::HandState_Lasso ){
- cv::circle( bufferMat, cv::Point( x, y ), 75, cv::Scalar( 128, 128, 0 ), 5, CV_AA );
- }
- }
- }
- }
- CvPoint skeletonPoint[BODY_COUNT][JointType_Count]={cvPoint(0,0)};
- // Joint
- for( int type = 0; type < JointType::JointType_Count; type++ ){
- ColorSpacePoint colorSpacePoint = { 0 };
- pCoordinateMapper->MapCameraPointToColorSpace( joint[type].Position, &colorSpacePoint );
- int x = static_cast<int>( colorSpacePoint.X );
- int y = static_cast<int>( colorSpacePoint.Y );
- skeletonPoint[count][type].x = x;
- skeletonPoint[count][type].y = y;
- if( ( x >= 0 ) && ( x < width ) && ( y >= 0 ) && ( y < height ) ){
- cv::circle( bufferMat, cv::Point( x, y ), 5, static_cast< cv::Scalar >( color[count] ), -1, CV_AA );
- }
- }
- //画骨骼
- drawSkeleton( bufferMat, skeletonPoint[count], joint,count);
- }
- //// Lean
- //PointF amount;
- //hResult = pBody[count]->get_Lean( &amount );
- //if( SUCCEEDED( hResult ) ){
- // std::cout << "amount : " << amount.X << ", " << amount.Y << std::endl;
- //}
- }
- }
- cv::resize( bufferMat, bodyMat, cv::Size(), 0.5, 0.5 );
- }
- for( int count = 0; count < BODY_COUNT; count++ ){
- SafeRelease( pBody[count] );
- }
- }
- SafeRelease( pColorFrame );
- SafeRelease( pBodyFrame );
- waitKey(1);
- cv::imshow( "Body", bodyMat );
- }
- SafeRelease( pColorSource );
- SafeRelease( pColorReader );
- SafeRelease( pDescription );
- SafeRelease(pBodySource);
- // done with body frame reader
- SafeRelease(pBodyReader);
- SafeRelease( pDescription );
- // done with coordinate mapper
- SafeRelease(pCoordinateMapper);
- if( pSensor ){
- pSensor->Close();
- }
- SafeRelease( pSensor );
- return 0;
- }
- void DrawBone( Mat& SkeletonImage, CvPoint pointSet[], const Joint* pJoints, int whichone, JointType joint0, JointType joint1)
- {
- TrackingState joint0State = pJoints[joint0].TrackingState;
- TrackingState joint1State = pJoints[joint1].TrackingState;
- // If we can't find either of these joints, exit
- if ((joint0State == TrackingState_NotTracked) || (joint1State == TrackingState_NotTracked))
- {
- return;
- }
- // Don't draw if both points are inferred
- if ((joint0State == TrackingState_Inferred) && (joint1State == TrackingState_Inferred))
- {
- return;
- }
- CvScalar color;
- switch(whichone) //跟踪不同的人显示不同的颜色
- {
- case 0:
- color = cvScalar(255);
- break;
- case 1:
- color = cvScalar(0,255);
- break;
- case 2:
- color = cvScalar(0, 0, 255);
- break;
- case 3:
- color = cvScalar(255, 255, 0);
- break;
- case 4:
- color = cvScalar(255, 0, 255);
- break;
- case 5:
- color = cvScalar(0, 255, 255);
- break;
- }
- // We assume all drawn bones are inferred unless BOTH joints are tracked
- if ((joint0State == TrackingState_Tracked) && (joint1State == TrackingState_Tracked))
- {
- line(SkeletonImage,pointSet[joint0], pointSet[joint1], color, 2);
- }
- else
- {
- line(SkeletonImage,pointSet[joint0], pointSet[joint1], color, 2);
- }
- }
- void drawSkeleton( Mat& SkeletonImage, CvPoint pointSet[],const Joint* pJoints, int whichone)
- {
- // Draw the bones
- // Torso
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_Head, JointType_Neck);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_Neck, JointType_SpineShoulder);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineShoulder, JointType_SpineMid);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineMid, JointType_SpineBase);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineShoulder, JointType_ShoulderRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineShoulder, JointType_ShoulderLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineBase, JointType_HipRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_SpineBase, JointType_HipLeft);
- // Right Arm
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_ShoulderRight, JointType_ElbowRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_ElbowRight, JointType_WristRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_WristRight, JointType_HandRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_HandRight, JointType_HandTipRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_WristRight, JointType_ThumbRight);
- // Left Arm
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_ShoulderLeft, JointType_ElbowLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_ElbowLeft, JointType_WristLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_WristLeft, JointType_HandLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_HandLeft, JointType_HandTipLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_WristLeft, JointType_ThumbLeft);
- // Right Leg
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_HipRight, JointType_KneeRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_KneeRight, JointType_AnkleRight);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_AnkleRight, JointType_FootRight);
- // Left Leg
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_HipLeft, JointType_KneeLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_KneeLeft, JointType_AnkleLeft);
- DrawBone(SkeletonImage, pointSet, pJoints, whichone, JointType_AnkleLeft, JointType_FootLeft);
- }
代码注解:主要定义一个DrawBone()函数来画骨架,而骨骼点的画出用的OpenCV的circle()函数实现。

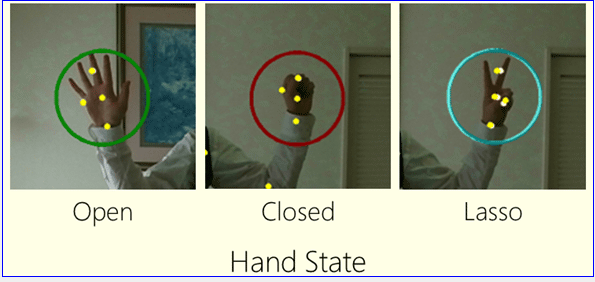
SDK自带的三种手势识别
欢迎拍砖指正!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









