







本说明针对 Firmware v1.2.0
参考:
https://pixhawk.org/start?id=zh/dev/shared_object_communication
1. 添加流程说明
在Firmware/msg下新建uORB的成员变量。注:第一个成员为uint64 timestamp,作为话题运行的时间戳,格式为:xxxx.msg 。
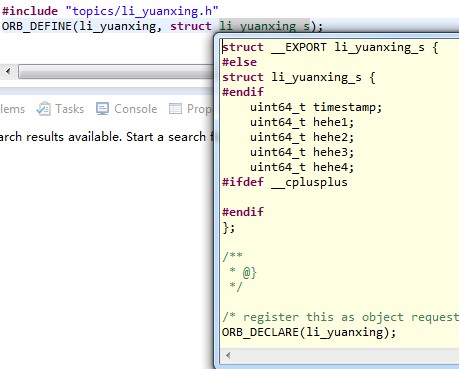
1. 在Firmware/src/modules/uORB中的object_common.cpp添加所需要的主题。在编译结束后,能查看到所定义的结构体,并且经过ORB_DECLARE。
2. 在Firmware/cmake中的ros-CMakeLists.txt中添加话题的xxxx.msg ,作为cmake的编译索引。
2. 添加话题示例
在Firmware/msg下新建 li_yuanxing.msg
内容为:
uint64 timestamp # Microseconds since system boot
uint64 hehe1
uint64 hehe2
uint64 hehe3
uint64 hehe41 在Firmware/src/modules/uORB中的object_common.cpp添加:
#include "topics/li_yuanxing.h"
ORB_DEFINE(li_yuanxing, struct li_yuanxing_s);2.在Firmware/cmake中的ros-CMakeLists.txt中添加:li_yuanxing.msg
注:
## Generate messages in the 'msg' folder
add_message_files(
FILES
rc_channels.msg
vehicle_attitude.msg
vehicle_attitude_setpoint.msg
manual_control_setpoint.msg
actuator_controls.msg
actuator_controls_0.msg
actuator_controls_virtual_mc.msg
vehicle_rates_setpoint.msg
mc_virtual_rates_setpoint.msg
vehicle_attitude.msg
vehicle_control_mode.msg
actuator_armed.msg
parameter_update.msg
vehicle_status.msg
vehicle_local_position.msg
position_setpoint.msg
position_setpoint_triplet.msg
vehicle_local_position_setpoint.msg
vehicle_global_velocity_setpoint.msg
offboard_control_mode.msg
vehicle_force_setpoint.msg
distance_sensor.msg
control_state.msg
+li_yuanxing.msg
)3. 原理说明
xxx.msg为成员;
ORB_DEFINE(li_yuanxing, struct li_yuanxing_s);为话题的定义;
在Firmware/msg/templates/px4/uorb/msg.template 有模块化代码的编译设置;
在编译的时候,通过msg.template,生成一定结构的代码,再通过ros-CMakeLists.txt进行编译,所以在编译一遍后,才能具体看到所定义的话题成员。
4. 相关函数说明
初始化
orb_advert_t orb_advertise(const struct orb_metadata *meta, const void *data)
orb_advert_t orb_advertise_multi(const struct orb_metadata *meta, const void *data, int *instance, int priority)发布
int orb_publish(const struct orb_metadata *meta, orb_advert_t handle, const void *data)
int orb_publish_auto(const struct orb_metadata *meta, orb_advert_t *handle, const void *data, int *instance, int priority)订阅
int orb_subscribe(const struct orb_metadata *meta)
int orb_subscribe_multi(const struct orb_metadata *meta, unsigned instance)拷贝
int orb_copy(const struct orb_metadata *meta, int handle, void *buffer)参数说明
orb_advert_t :空指针 handle
const struct orb_metadata *meta :话题ID
const void *data :相关数据类型指针
话题之间的发布订阅依赖于handle进行相关性的传递,话题的ID和结构通过ORB_DEFINE(li_yuanxing, struct li_yuanxing_s);来定义;
注:在初始化和发布用的是handle指针,订阅和copy用的是整形。
5. 发布订阅示例
示例在 px4_simple_app.c上进行测试
/*添加头文件*/
#include <uORB/uORB.h>
#include <uORB/topics/li_yuanxing.h>
/*定义话题结构*/
struct li_yuanxing_s test;
/*初始化数据*/
memset(&test, 0, sizeof(test));
/*初始化话题*/
/*test_pub 为handle指针*/
orb_advert_t test_pub = orb_advertise(ORB_ID(li_yuanxing), &test);
/*test数据赋值*/
test.hehe1 = 1;
test.hehe2 = 2;
test.hehe3 = 3;
/*发布测试数据*/
orb_publish(ORB_ID(li_yuanxing), test_pub, &test);
/*订阅数据,在copy之前,必须要订阅*/
/*test_sub_fd为handle*/
int test_sub_fd = orb_subscribe(ORB_ID(li_yuanxing));
struct li_yuanxing_s data_copy;
/*copy数据*/
orb_copy(ORB_ID(li_yuanxing), test_sub_fd, &data_copy);
/*打印*/
PX4_WARN("[px4_simple_app] Accelerometer:\t%8.4f\t%8.4f\t%8.4f",
(double)data_copy.hehe1,
(double)data_copy.hehe2,
(double)data_copy.hehe3);
结果
















 3717
3717

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









