




 本文深入解析SIFT特征提取的关键步骤,包括如何从差分高斯金字塔中确定潜在特征点,精确定位特征点位置,以及去除低对比度和边缘特征点,确保稳定性。通过对OpenCV源码的分析,详细介绍了SIFT算法的实现细节。
本文深入解析SIFT特征提取的关键步骤,包括如何从差分高斯金字塔中确定潜在特征点,精确定位特征点位置,以及去除低对比度和边缘特征点,确保稳定性。通过对OpenCV源码的分析,详细介绍了SIFT算法的实现细节。
最近微博上有人发起投票那篇论文是自己最受益匪浅的论文,不少人说是lowe的这篇介绍SIFT的论文。确实,在图像特征识别领域,SIFT的出现是具有重大意义的,SIFT特征以其稳定的存在,较高的区分度推进了诸多领域的发展,比如识别和配准。上一篇文章,解析了SIFT特征提取的第一步高斯金字塔的构建,并详细分析了高斯金字塔以及差分高斯金字塔如何完成一个连续的尺度空间的构建。构建高斯金字塔不是目的,目的是如何利用高斯金字塔找到极值点。
lowe在论文中阐述了为什么使用差分高斯金字塔:
1)差分高斯图像可以直接由高斯图像相减获得,简单高效
2) 差分高斯函数是尺度规范化的高斯拉普拉斯函数的近似,而高斯拉普拉斯函数的极大值和极小值点是一种非常稳定的特征点(与梯度特征、Hessian特征和Harris角点相比)
有了这些基础,我们就可以放开手脚从差分高斯金字塔中找点了。
特征点的确定主要包括两个过程:确定潜在特征点,精确确定特征点的位置和去除不稳定特征点。
确定潜在特征点
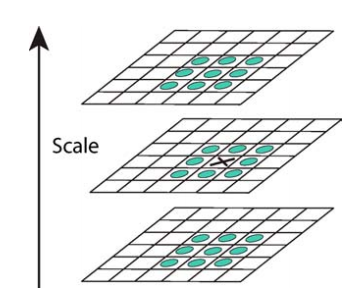
上文已经阐述,高斯拉普拉斯函数的极大值和极小值点是一种非常稳定的特征点,因此我们从差分高斯金字塔中寻找这些潜在特征点。差分高斯金字塔是一个三维空间(平面图像二维,尺度一维),因此我们在三维空间中在寻找极大值点和极小值点。具体方法是比较当前特征点的灰度值和其他26个点的灰度值的大小,这26个点包括:当前尺度下该点的8邻域以及前一尺度和后一尺度下与该点最近的9个点(9*2+8=26),如下图所示:
OpenCV该部分源码:
void SIFT::findScaleSpaceExtrema( const vector<Mat>& gauss_pyr, const vector<Mat>& dog_pyr,
vector<KeyPoint>& keypoints ) const
{
......
for( int o = 0; o < nOctaves; o++ )//每一个八度
for( int i = 1; i <= nOctaveLayers; i++ )//对八度中的存在具有第1至第nOctaveLayers层高斯差分图像提取特征点
{
......
for( int r = SIFT_IMG_BORDER; r < rows-SIFT_IMG_BORDER; r++)//图像二维空间.行
{
......
for( int c = SIFT_IMG_BORDER; c < cols-SIFT_IMG_BORDER; c++)//图像二维空间.列
{
.......
// 当前点与26个点比较,比较两次,分别确定是否是极大值,是否是极小值
if( std::abs(val) > threshold &&
((val > 0 && val >= currptr[c-1] && val >= currptr[c+1] &&
val >= currptr[c-step-1] && val >= currptr[c-step] && val >= currptr[c-step+1] &&
val >= currptr[c+step-1] && val >= currptr[c+step] && val >= currptr[c+step+1] &&
val >= nextptr[c] && val >= nextptr[c-1] && val >= nextptr[c+1] &&
val >= nextptr[c-step-1] && val >= nextptr[c-step] && val >= nextptr[c-step+1] &&
val >= nextptr[c+step-1] && val >= nextptr[c+step] && val >= nextptr[c+step+1] &&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3595
3595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









