









OpenCV配套的教程Tutorials对于Video的部分,没有实例进行说明,我只能摸石头过河啦,之前试过一个camShift做目标检测,这次试一试光流法做运动估计。这里使用的光流法是比较常用的 Lucas-Kanade方法。对于光流法的原理,我就不过多介绍了,主要讲使用OpenCV如何实现。
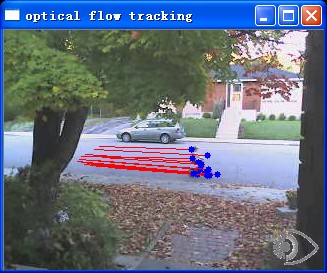
首先利用goodFeaturesToTrack函数得到图像中的强边界作为跟踪的特征点,接下来要调用calcOpticalFlowPyrLK函数,输入两幅连续的图像,并在第一幅图像里选择一组特征点,输出为这组点在下一幅图像中的位置。再把得到的跟踪结果过滤一下,去掉不好的特征点。再把特征点的跟踪路径标示出来。说着好简单哦~~
程序的效果和代码下载http://download.csdn.net/detail/yang_xian521/3811478















 1077
1077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









