






首先创建一个工作空间catkin_ws,相信大家都会了,不会的话留言。
如果在vs code运行的话记得在扩展下载ros扩展,最好都下载,效果如下:
然后在工作空间下新建一个包:包名为car_demo,在包下新建两个文件夹分别是:launch文件夹和urdf文件
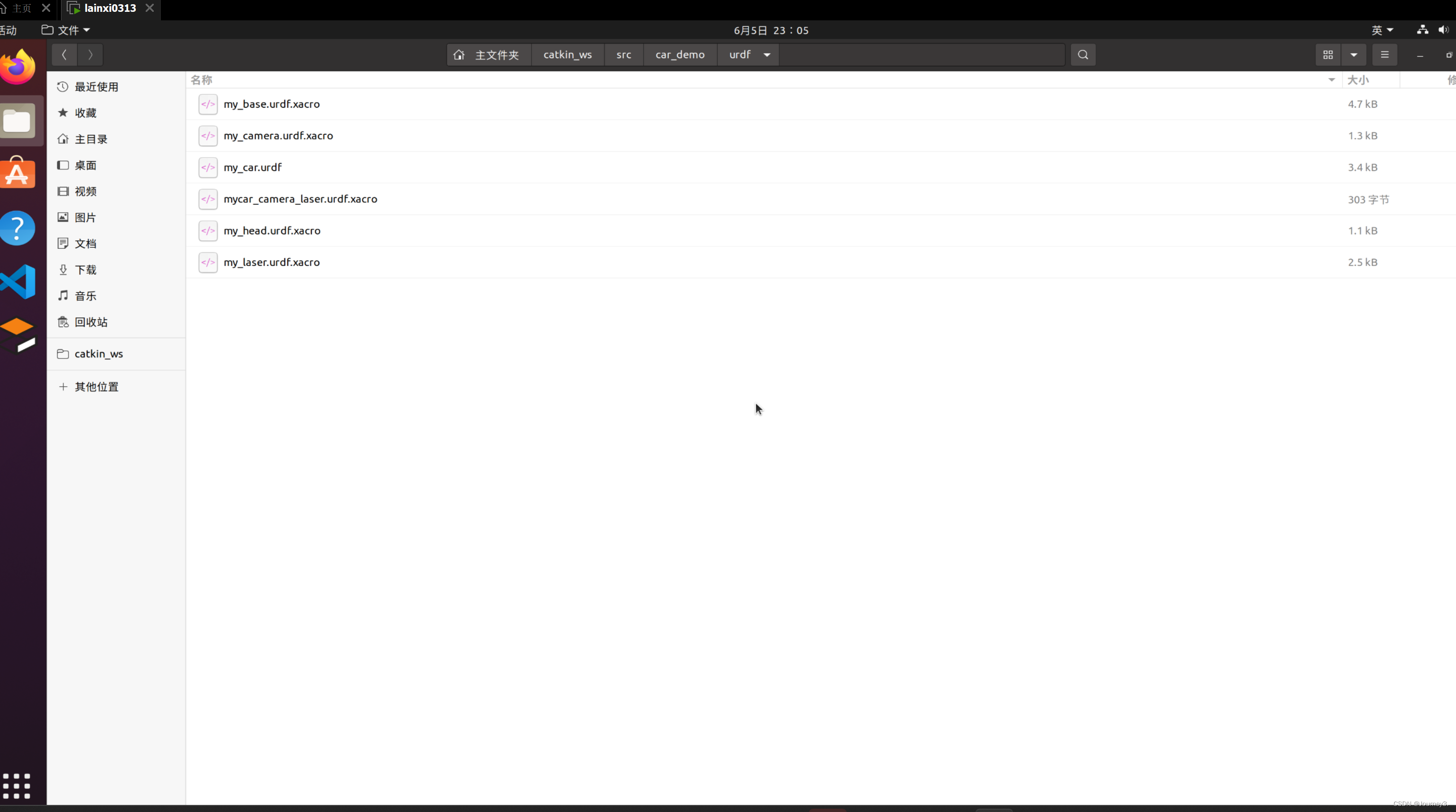
之后在urdf文件夹下新建五个文件,分别是负责小车的底部和摄像头以及雷达和连接这些代码的总代码等的代码
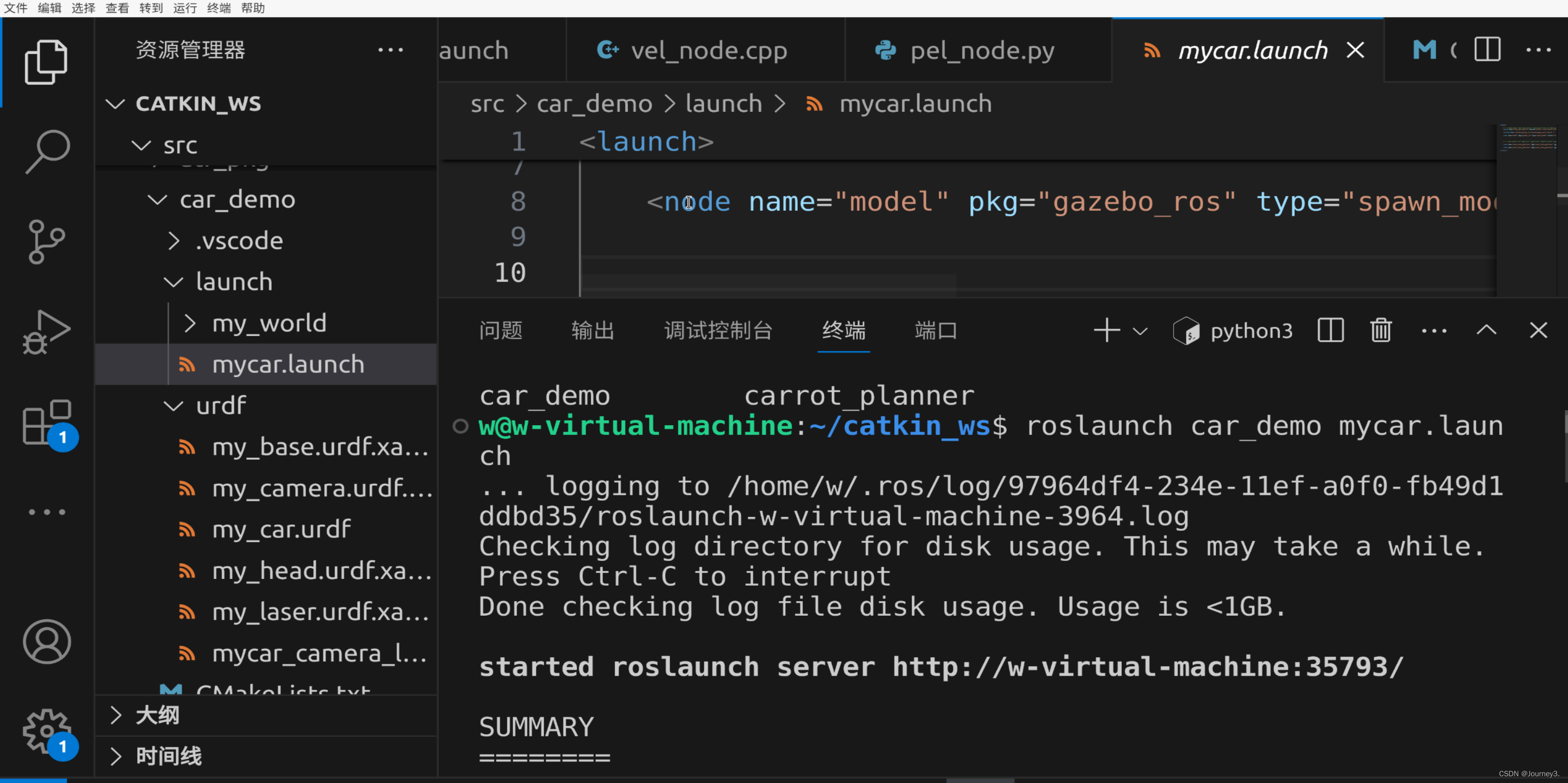
接下来就是要新建一个launch文件下新建一个mycar.launch文件用来运行的:
然后在终端编译:catkin_make,就可以运行文件mycar.launch了:运行launch的代码如下:roslaunch car_demo mycar.launch
这句代码的意思就是,运行(roslaunch)工具包名(car_demo) launch文件名(mycar.launch)
运行后就就会出现效果图了,如下:
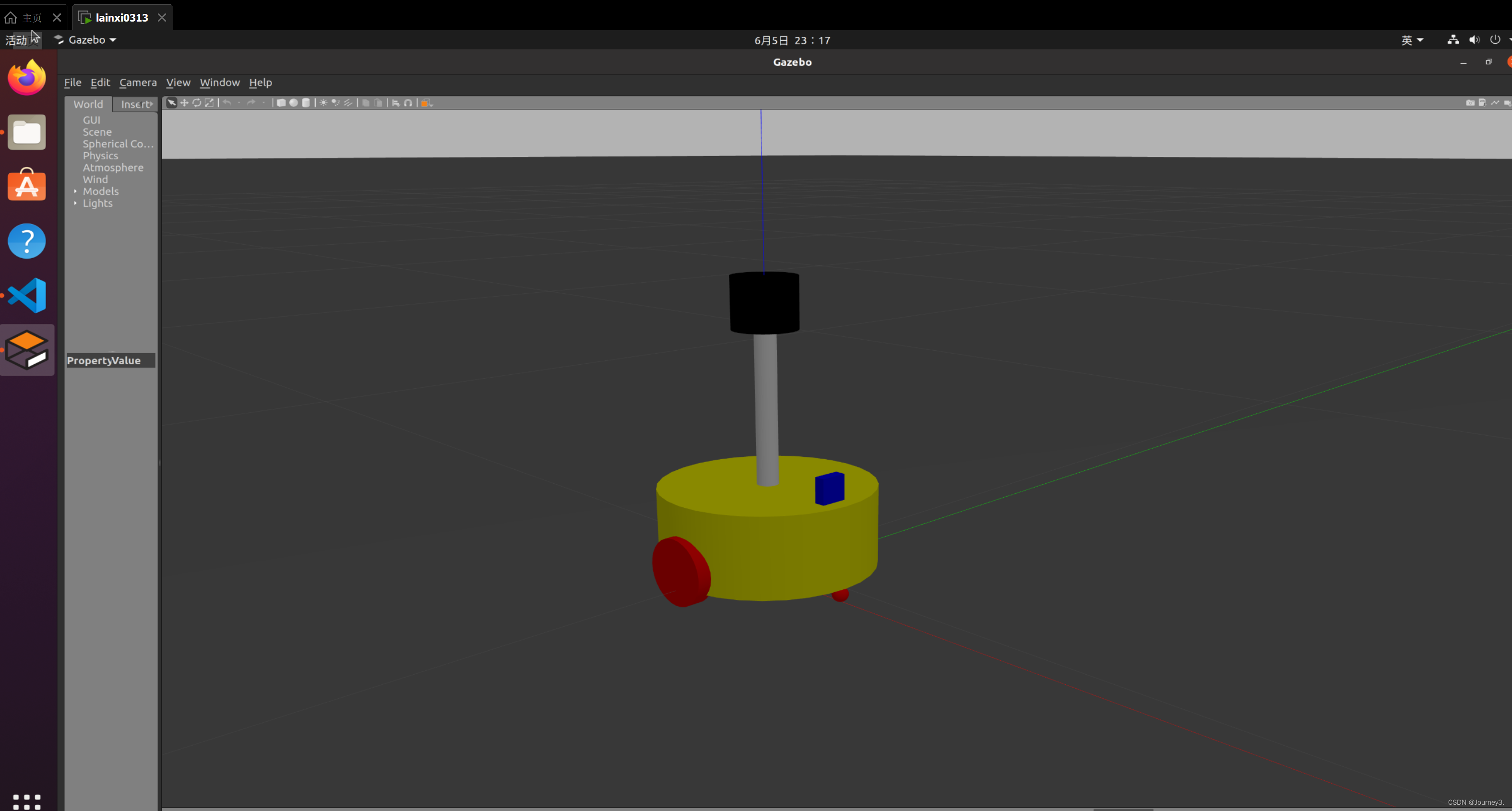
注意轮子个数和大小以及摄像头位置等都是可以改变的噢,具体代码文件可以私我,因为我不知道怎么放上去,谢谢















 990
990

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









