







目录
一、简介
1.概念
TB6612FNG 是一种用于直流电机的驱动 IC,具有低导通电阻的 LD MOS 结构输出晶体管。通过两个输入信号 IN1 和 IN2,可以选择以下四种模式之一:顺时针(CW)、逆时针(CCW)、短刹车(short brake)和停止模式(stop mode)。
2.引入
TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流 MOSFET-H 桥结构,双通道电路输出,可同时驱动 2 个电机。也许大家更熟悉 L298N, 其实这两者的使用基本一致的。而且,相比 L298N 的热耗性和外围二极管续流电路, 它无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。对于 PWM 信号输入频率范围,高达 100 kHz 的频率更是足以满足我们大部分的需求了。

二、特性
- 电源电压:VM = 15V(最大值)
- 输出电流:IOUT = 1.2A(平均)/ 3.2A(峰值)
- 输出低导通电阻:0.5Ω(上管+下管,典型值 @ VM ≥ 5V)
- 待机(省电)系统 • 顺时针/逆时针/短刹车/停止功能模式
- 内置过热关断电路和低电压检测电路
- 小型封装(SSOP24:0.65 mm 引脚间距)
三、引脚定义
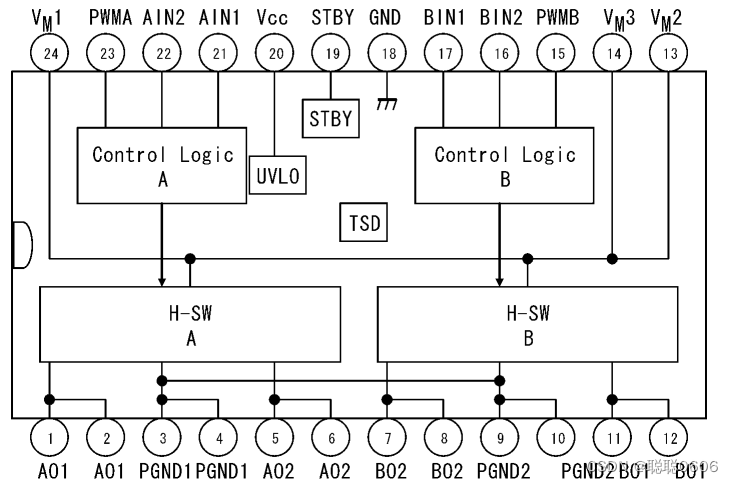
| 引脚号 | 引脚名 | 类型 | 说明 |
| 1 | AO1 | O | 通道A输出1 |
| 2 | AO1 | ||
| 3 | PGND1 | —— | 电源接地1 |
| 4 | PGND1 | ||
| 5 | AO2 | O | 通道A输出2 |
| 6 | AO2 | ||
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1644
1644

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









