






我们设计的小车是二路寻迹小车, 用了两个光电对管RPR220。小车的主要逻辑功能是是,如果左边的RPR220寻迹到黑线,左轮反转,右轮正转,实现左转;如果右边PRP2200寻迹到黑线,右轮反转,左轮正转,实现右转;如果同时寻到黑线,就停;如果同时没有寻到黑线,两个RPR220都有光反射回来,那么两个轮子就都正转,实现小车直行的功能。

如上图所示是一个逻辑模块的仿真图,我们利用译码器和与非门的特性设计电路,来实现小车寻迹的主要功能,上面U3B和U4A控制一个电机电路,U3A和U4B控制另一个电机电路。因为我们做的是二路寻迹,所以SW1和SW2接两路寻迹输出。由逻辑模块连接驱动模块和寻迹模块来控制电机的正转反转,即小车的直行,左转,右转。
下面的U5A是使能端,控制电机转还是停的,用它来控制小车停止。所以,我们把它的输出端全都连到了上面的与非门,这样它输出0的时候,上面的与非门都会输出1,小车两个轮子都停。
我们用的与非门是四输入与非门74LS20,但是其实有的与非门用不到四输入,我们因为材料有局限,以及想统一对称,就用来四输入与非门。其实还可以用三输入与非门74LS10和二输入与非门74LS00芯片尝试设计电路。
中间芯片是138译码器,它最高电压不要超过6V,很容易烧坏了。
实际硬件图如下:
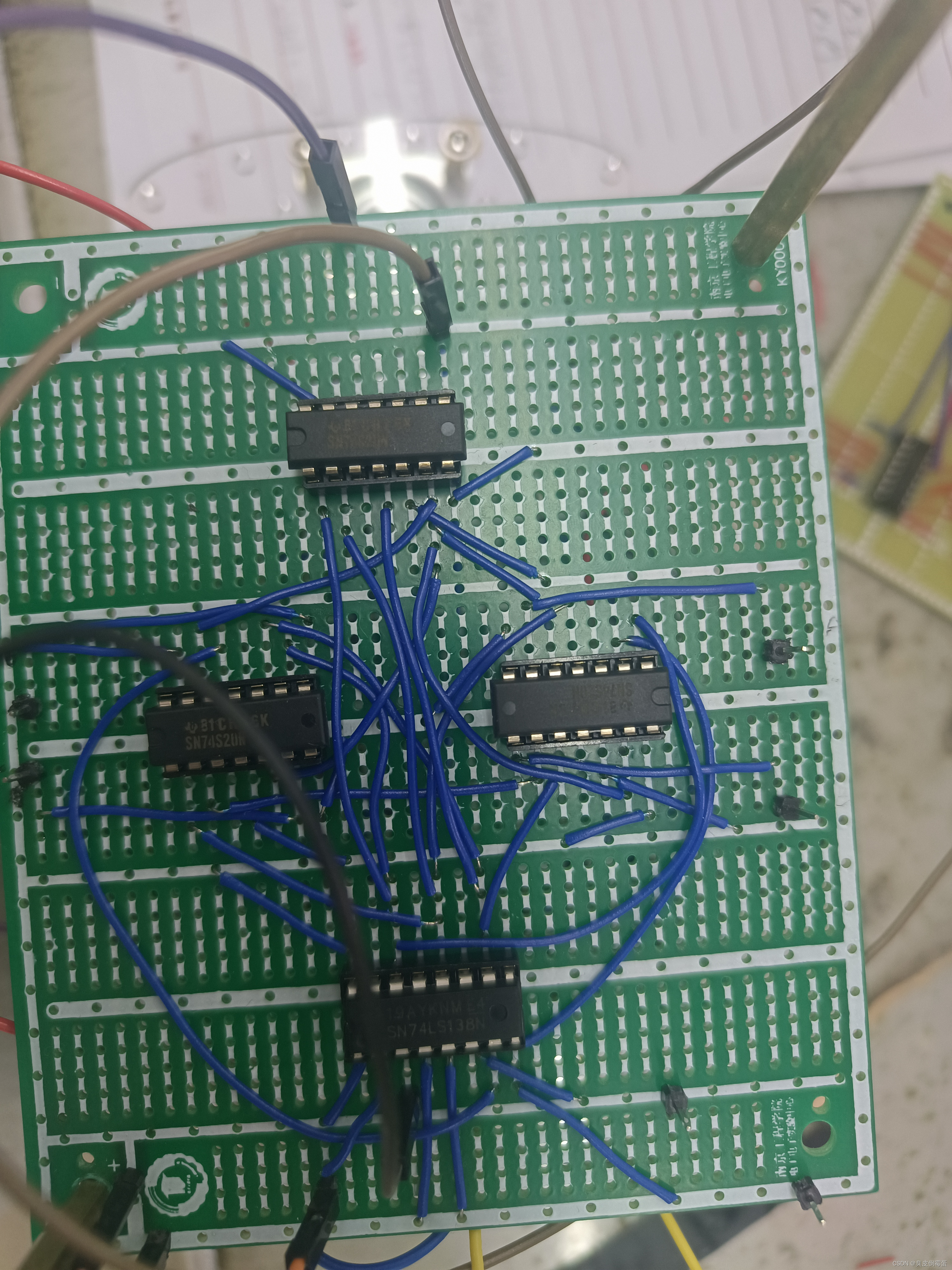
我们在实际连接驱动模块的时候,发现驱动不了。总是有问题,但是单独测两个模块,又没有问题。逻辑也是对的,驱动也可以实现两个轮子的正转反转。但是一连在一起就不行了。后来我们发现给两个板子都单独供电,就可以了。

















 1879
1879

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









