






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
无人驾驶车辆( Self-driving Vehicle)是地面无人车辆的一种,在未来智能交通系统中有着广阔的应用前景。不仅各大汽车厂商纷纷研发无人驾驶技术测试样车,互联网与移动通信公司也积极涉足这一领域。本章首先介绍无人车辆通用概念、无人驾驶车辆与无人车辆的关系,说明无人车辆的主要组成部分,即任务决策、环境感知、路径规划、路径跟踪与车辆平台控制子系统,总结
了无人驾驶车辆的特点,最后介绍模型预测控制理论在无人驾驶车辆控制过程中的应用情况。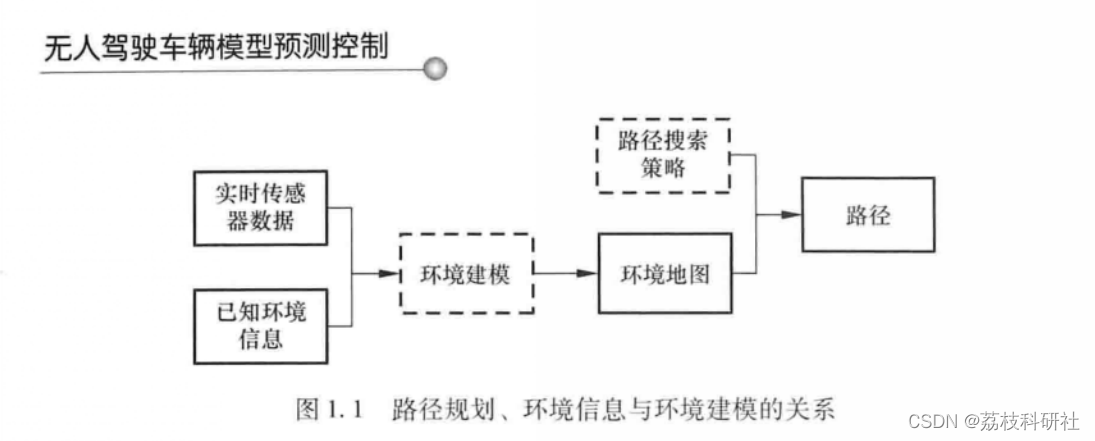
车辆动力学模型分析对于解决无人驾驶车辆运动规划与控制问题具有十分关键的作用。首先,在规划与控制系统中引人动力学模型可以通过模型的等效约束转化减少规划与控制的计算量,提高系统的实时性。其次,以准确的动力学模型作为预测模型,可以提高控制器对车辆未来行为的预测能力,进而在保证车辆稳定运行的同时,充分发挥车辆的机动潜能,比如高速运行状况下的主动危险规避运动规划与控制,充分体现车辆平台运动学与动力学约束条件的影响。
无人驾驶车辆的模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它在自动驾驶领域扮演着重要角色。MPC通过不断预测车辆未来状态并优化控制输入,以实现对车辆的精确控制,满足安全、效率和舒适性的要求。以下是关于无人驾驶车辆模型预测控制研究的几个关键方面:
1. 基本原理
模型预测控制基于车辆动力学模型,该模型可以是简化的数学表达式,也可以是复杂的仿真模型,用来预测车辆在未来多个时间步的行为。控制算法会在一个预设的时间窗口内,根据当前状态、预期目标(如路径跟踪、速度控制)以及环境约束(如最大加速度、道路边界),计算出一系列最优的控制动作(如转向角、加速度)。然后,只执行这一序列中的第一个控制动作,之后重复此过程,不断调整未来的控制策略。
2. 关键技术挑战
- 模型精度:提高模型预测的准确性是关键,需要考虑车辆动力学、轮胎-路面交互、环境因素(如风阻)等。
- 实时性:MPC需要在短时间内完成复杂的优化计算,这对计算平台提出了高要求。
- 非线性与不确定性处理:实际车辆动态往往涉及非线性行为,且外界环境(如其他车辆、行人)存在不确定性,需采用高级优化算法和鲁棒控制策略。
- 多目标优化:在保证安全的同时,还需考虑乘客舒适度、能耗效率等多重目标的平衡。
3. 研究进展
- 自适应与学习型MPC:结合机器学习技术,使控制器能够自适应不同驾驶场景和车辆状态,甚至在线学习环境模型,提升控制性能。
- 多级或分层MPC:将MPC应用于不同层级的决策问题,如在路径规划和轨迹跟踪中分别应用,既保持全局最优又确保局部执行的高效和灵活性。
- 集成环境感知与预测:结合先进的传感器技术和预测算法,使MPC能提前对周围环境变化做出反应,提高行驶安全性。
- 硬件在环(HIL)和实车测试:通过HIL仿真及真实道路测试验证MPC算法的有效性和鲁棒性,不断优化控制策略。
4. 未来趋势
随着计算能力的提升和人工智能技术的发展,模型预测控制在无人驾驶领域的应用将更加广泛和深入。未来的研究可能会更侧重于提高算法的实时性能、增强系统的适应性和学习能力,以及如何更好地整合MPC与其他自动驾驶技术(如视觉感知、V2X通信)以实现更智能、更自主的驾驶行为。此外,针对特定应用场景(如城市拥堵、高速巡航、复杂天气条件)的定制化MPC策略也将成为研究热点。
📚2 运行结果
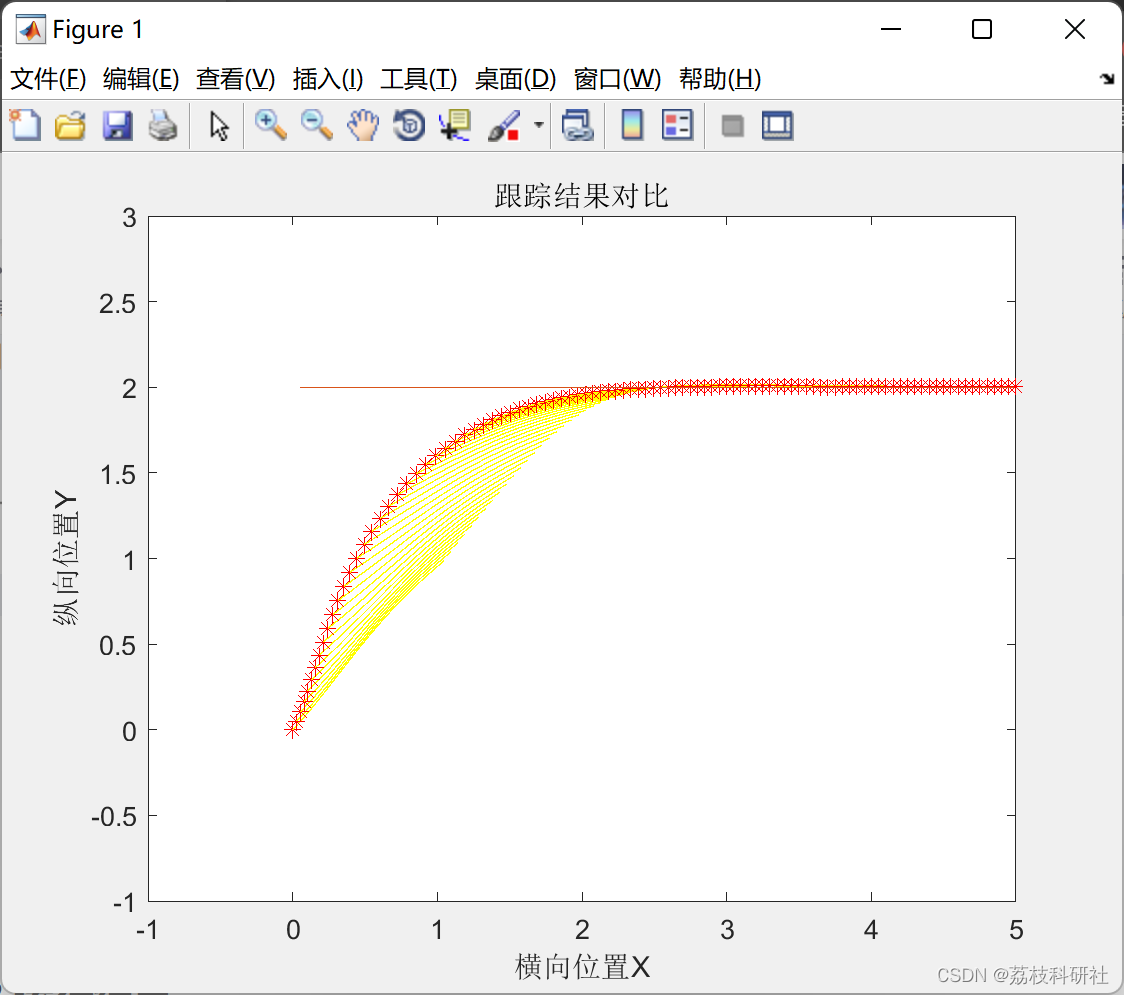



部分代码:
%% Tracking a constant reference trajectory
Nx=3; %状态量个数
Nu =2; %控制量个数
Tsim =20; %仿真时间
X0 = [0 0 pi/3]; % 初始位置
[Nr,Nc] = size(Xout); % Nr is the number of rows of Xout
% Mobile Robot Parameters
c = [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1];
L = 1; %车辆轴距
Rr = 1; %轮胎直径
w = 1; %车轮转速
% Mobile Robot variable Model
vd1 = Rr*w; % 参考系统的纵向速度
vd2 = 0; %参考系统前轮偏角
%矩阵定义
x_real=zeros(Nr,Nc); %状态量
x_piao=zeros(Nr,Nc); %状态量误差
u_real=zeros(Nr,2);
u_piao=zeros(Nr,2);
x_real(1,:)=X0; %把初始状态赋值给状态量第一行
x_piao(1,:)=x_real(1,:)-Xout(1,:); %计算第一个状态量误差
X_PIAO=zeros(Nr,Nx*Tsim);
XXX=zeros(Nr,Nx*Tsim); %用于保持每个时刻预测的所有状态值
q=[1 0 0;0 1 0;0 0 0.5];
Q_cell=cell(Tsim,Tsim);
for i=1:1:Tsim
for j=1:1:Tsim
if i==j
Q_cell{i,j}=q;
else
Q_cell{i,j}=zeros(Nx,Nx);
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。















 1884
1884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









