






回顾
上一期分享中,给大家回顾了一些基础概念,参数方程及向量,然后引入了GLM的用法,希望大家都已经配置成功,如果有任何问题需要协助,可以随时留言给我们,也可以通过虹图AI开放平台开发者社区进行交流和分享。
这一期讲会给大家讲述关于3D变换,运动学基础及代码实现。
几何vs拓扑
首先我们看下几何结构和拓扑结构的区别。假定原始结构是如下图所示:
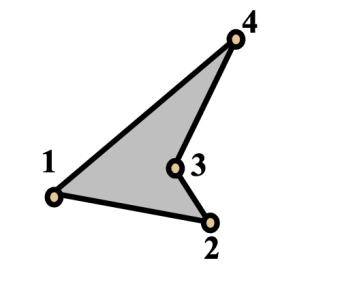
变成下图所示,其实就是几何结构变化,可以观察到的是几何形状发生了改变,但是拓扑顺序并未发生变化,仍然是1-2-3-4-1。
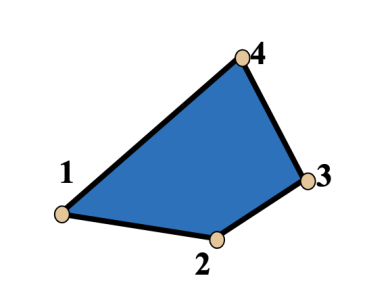
如果变成现在下面这张图,就是拓扑变化,可以观察到的是几何形状没有发生变化,但是拓扑顺序变化了,变成了1-2-4-3-1。
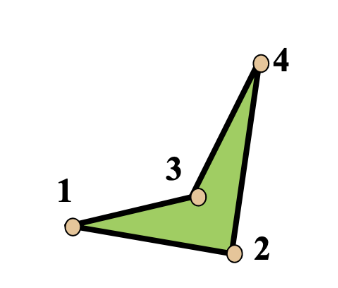
那么几何结构其实就是图形在坐标系的位置,拓扑结构就是连接顺序。
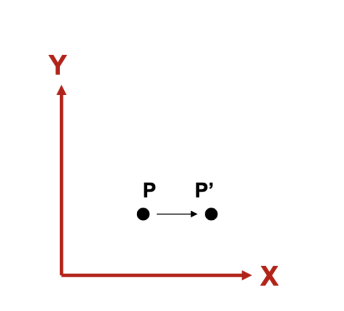
我们把在坐标系中位置移动成为坐标变换Coordinate Transformation,例如坐标系中,P需要沿着X轴移动2个单位,新坐标变成P'=(P',P')=(P +2.,P)。
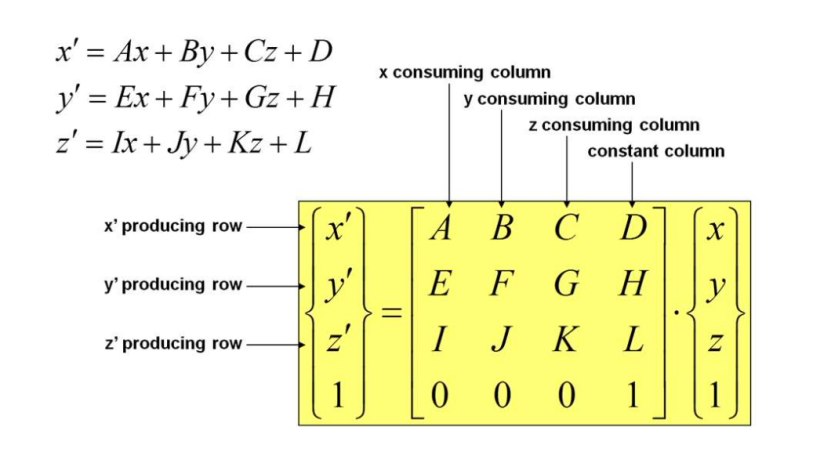
3D坐标的线性变换可以用下面的公式来表达:
x'= Ax+By+Cz+D
y' = Ex + Fy + Gz + H
z' = Ix + Jy + Kz + L
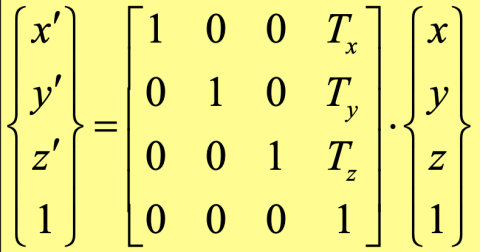
比如位置的平移:

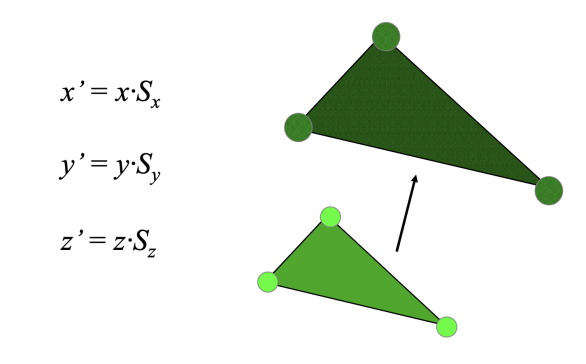
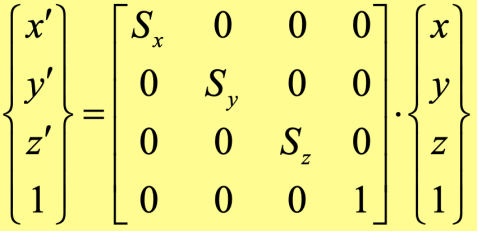
缩放:
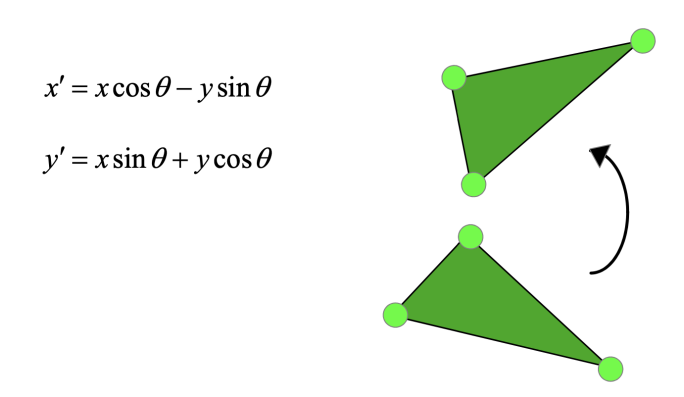
旋转:
让我们再回到这个变换公式:
x'= Ax+By+Cz+D
y’ = Ex + Fy + Gz + H
z' = Ix + Jy + Kz + L
现在我们用矩阵的方式来看看如何实现。
同样的方式我们能知道平移矩阵:
缩放矩阵:
正向运动学
相信类似的机械臂大家都见过,此处的正向运动学的对象是机械臂的运动状态。一个机械臂由多个连杆(Link) 和链接他们的关节(Joint) 组成。这三个不同的部分看做三个不同的坐标系统,并且和地面都有一定的夹角。
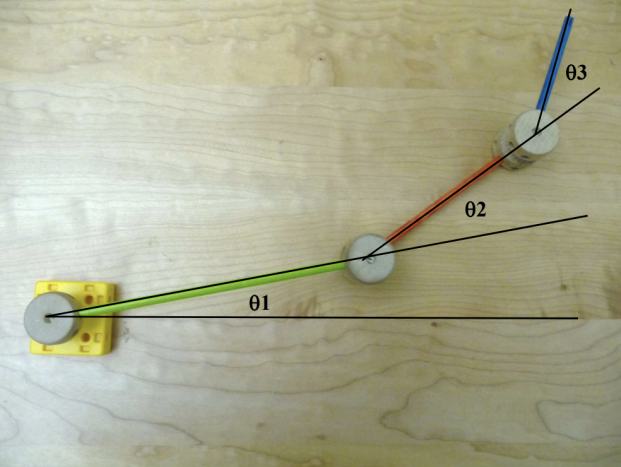
那么抽象后它们每个部分都该如何运动呢?
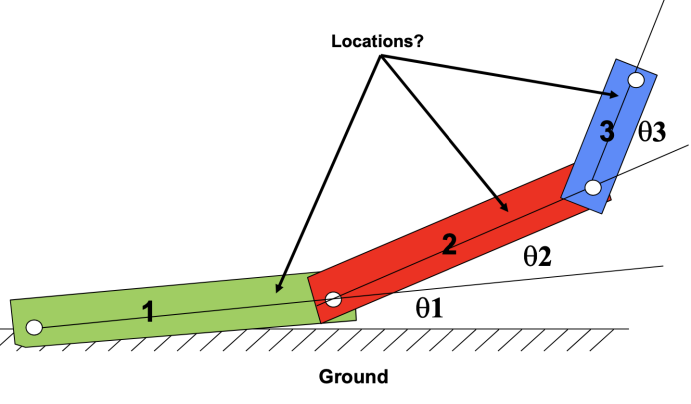
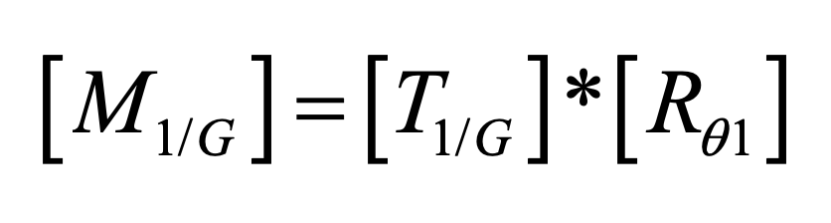
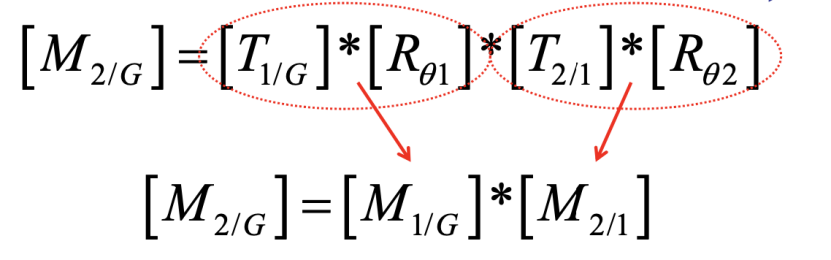
对于模块1之于地面,先是旋转了θ1角度,平移量记为T1/G,可得到新的位置:
对于模块2,先是旋转了θ2角度,平移了模块1的长度,又旋转了θ1角度,平移了T1/G,可得出新的位置:
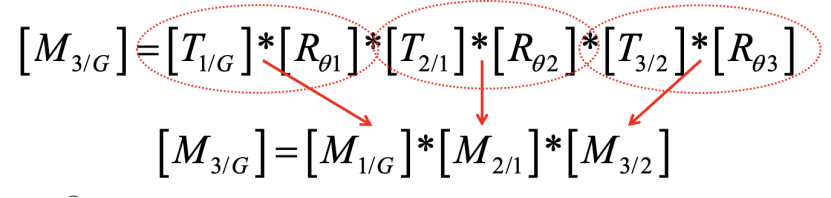
同样的方法能得出模块3的位置:
那么我们通过代码来实现:画模块这个可以使用OpenGL方法绘制:
DrawLinkOne( )
{
glColor3f( 1., 0., 0. ); // red, green blue
glBegin( GL_QUADS );
glVertex2f( -BUTT, -THICKNESS/2 );
glVertex2f( LENGTH_1, -THICKNESS/2 );
glVertex2f( LENGTH_1, THICKNESS/2 );
glVertex2f( -BUTT, THICKNESS/2 );
glEnd( );
}绘制整个摆臂链条:
DrawMechanism( float θ1, float θ2, float θ3 )
{
glPushMatrix( );
gl_Translatef( X1, Y1, Z1 );
glRotatef( θ1, 0., 0., 1. );
glColor3f( 1., 0., 0. );
DrawLinkOne( );
glTranslatef( LENGTH_1, 0., 0. );
glRotatef( θ2, 0., 0., 1. );
glColor3f( 0., 1., 0. );
DrawLinkTwo( );
glTranslatef( LENGTH_2, 0., 0. );
glRotatef( θ3, 0., 0., 1. );
glColor3f( 0., 0., 1. );
DrawLinkThree( );
glPopMatrix( );
}最后再绘制窗口定义一些3D视窗的信息等:
DrawMechanism( float θ1, float θ2, float θ3 )
{
glPushMatrix( );
gl_Translatef( X1, Y1, Z1 );
glRotatef( θ1, 0., 0., 1. );
glColor3f( 1., 0., 0. );
DrawLinkOne( );
glTranslatef( LENGTH_1, 0., 0. );
glRotatef( θ2, 0., 0., 1. );
glColor3f( 0., 1., 0. );
DrawLinkTwo( );
glTranslatef( LENGTH_2, 0., 0. );
glRotatef( θ3, 0., 0., 1. );
glColor3f( 0., 0., 1. );
DrawLinkThree( );
glPopMatrix( );
}那么能看到如下结果:
逆向运动学
正向运动学是在给定所有关节角度的情况下计算末端运动空间位置的过程,而逆向运动学则正好相反,它是在给定末端的空间位置的前提下,求解关节需要成多少角度。那么如何计算出这个角度呢?这里介绍一种循环坐标下降(Cyclic Coordinate Descent ,CCD)算法。
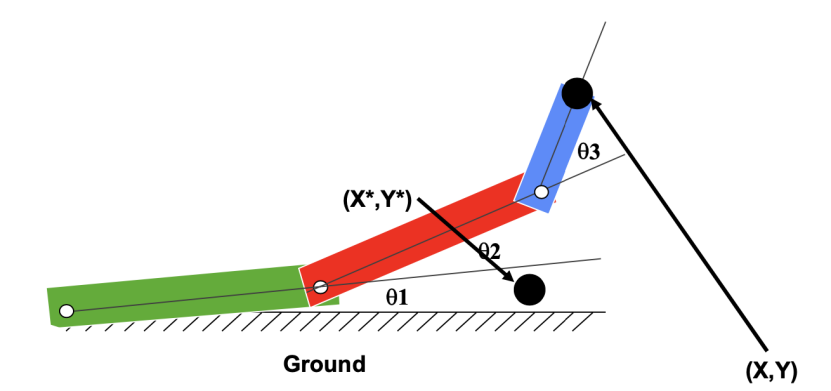
简单来说就是目标坐标如果是(X*,Y*),那么就先变θ1,让(X,Y)尽可能接近(X*,Y*),然后再变θ2,然后θ3,不行就再次变θ1,然后θ2,然后θ3,以此类推,最终达到(X*,Y*)。当然,变θ1时,保持θ2和θ3恒定,其他也是亦然。
逆向运动学同样的demo结果如下:
本期给大家介绍了一些坐标变换及变换矩阵,以及运动学模拟和代码,重点还是正向运动学的例子,可以重点参考学习下。如果大家有问题可以留言给我们,我们会进行解答,如果需要更快获得帮助,可以在虹图AI开放平台开发者社区板块提问。
关于虹图AI人像人体特效的美颜SDK,3D Avatar SDK等产品。
敬请期待~















 79
79











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











